面對稱飛行器橫側向穩定控制設計研究
2019-07-11 07:23:00李天任
導彈與航天運載技術 2019年3期
李天任,張 旋,黃 佩,周 華,郝 穎
(中國運載火箭技術研究院研究發展部,北京,100076)
0 引 言
Nonweiler[1]發現的楔形氣動構型是最早高升阻比面對稱氣動構型,隨后陸續發展出錐形流[2]、吻切錐[3]等面對稱高升阻比構型。在設計飛行條件下,該類構型前緣處產生的附體激波,阻止下表面的高壓氣體橫向“泄露”到上表面,可有效減少飛行器的升力損失[4],提高其升阻比,進而使其成為高升阻比再入飛行器重要構型之一[4]。面對稱高升阻比再入飛行器,氣動特性復雜,通道間耦合效應強烈,可能導致控制機構的執行效果與設計預期效果相去甚遠。
面對稱再入飛行器的氣動構型在實際應用中,需設計合適的姿態穩定策略及控制參數,使其能沿著既定的目標飛行。本文采用全狀態量反饋控制器,推導出適用于不同狀態的控制穩定條件,設計了相應控制策略,并通過不同工況下的參數調整與運動仿真,驗證了穩定條件適應性與控制策略有效性。
1 橫側向姿態動力學模型
基于中國航天領域常用的機體坐標系[5],建立非線性運動學與動力學方程:
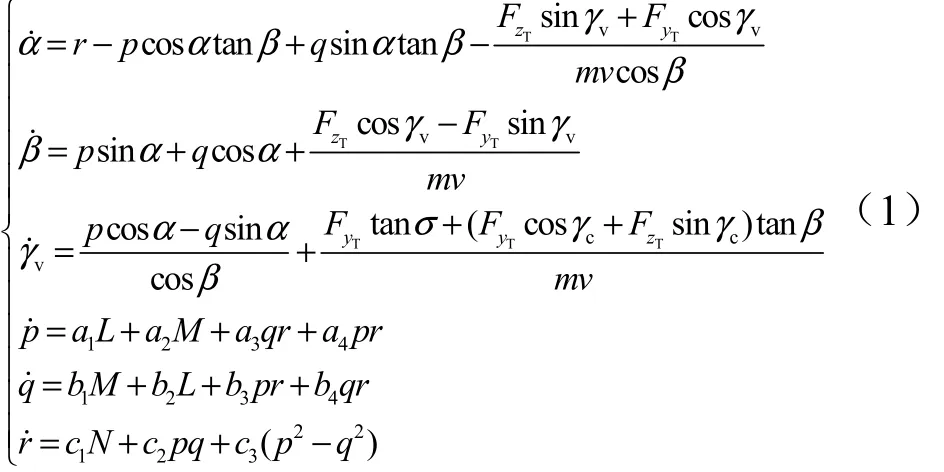
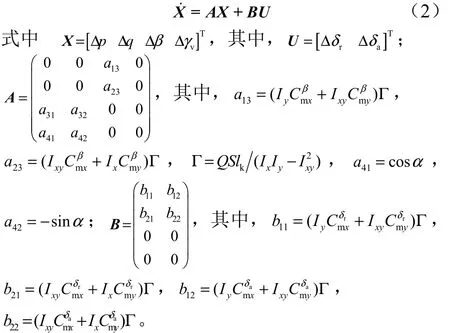
面對稱再入飛行器采用傾斜轉彎(Bank-to-Turn,BTT)控制方式,側滑角始終限定在0°附近,忽略縱向運動及氣動阻尼項對橫側向運動的影響,并將重力因素劃歸制導系統補償,設:δr,δa為飛行器方向舵及副翼舵偏角; Ix,Iy,Ixy為飛行器對體軸 OX,OY的主轉動慣量及慣量積; Q , S, lk為飛行動壓、飛行器參考面積和參考長度;為滾轉力矩系數與偏航力矩系數對側滑角、方向舵及副翼舵偏角的導數。得到基于平衡狀態的橫側向小擾動線性化狀態方程為
2 控制穩定性分析
2.1 方向舵控制穩定條件
基于式(2),采用全狀態量反饋,得到控制器方程為

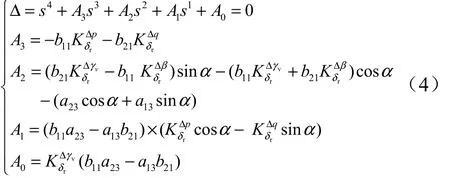
根據勞斯穩定判據,系統穩定的充要條件為

以上充要條件形式復雜,不便于分析,這里推導其必要條件:

另設:
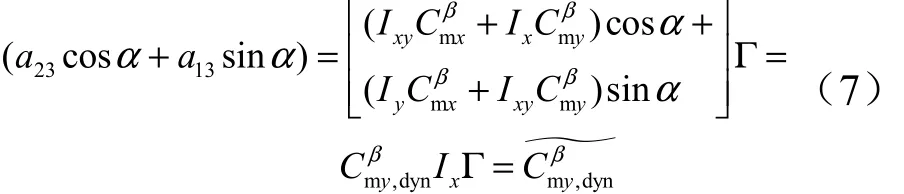
考慮到面對稱飛行器通常要求荷蘭滾模態穩定,本文坐標系下即有,同時限定飛行攻角在,可得以下穩定條件:
2.2 副翼控制穩定條件
與第2.1節的分析類似,副翼采用全狀態量反饋,得到控制器方程如下:

另設:
式中 dLCDP為橫向操縱偏離參數(Lateral Control Departure Parameter,LCDP)與 d~LCDP同號。可得以下穩定條件:

2.3 常規控制穩定條件
根據文獻[6],副翼與方向舵分別控制橫向與側向通道,得到常規控制方程為
綜合式(8)與式(11),得到如下穩定性條件:

式(13)表明,若飛行器使用常規控制方案實現姿態穩定,則其氣動特性需滿足:
3 控制器設計與仿真
1958年,Moul和Paulson[7]提出的LCDP判據,是高升阻比再入飛行器氣動布局設計與評估的重要指標。因此,本文針對某面對稱再入飛行器,分別選取LCDP為負值與正值兩個典型飛行工況,進行控制器設計與仿真。
3.1 LCDP小于0
此時,飛行器橫側向狀態方程參數取值為:α=10°,a13=-9.57,a23=-0.2885,b11=0.4382,b21=0.1087,b12=-3.294,b22=-0.0642。
這一工況下,按照舵面使用方式不同,設計3類控制策略:
a)策略一:方向舵主導控制橫側向通道,反饋側滑角、傾側角及偏航角速度;副翼增穩,反饋滾轉角速度。
b)策略二:副翼主導控制橫側向通道,反饋側滑角、傾側角及滾轉角速度;方向舵增穩,反饋偏航角速度。
c)策略三:方向舵控制側向通道,反饋側滑角及偏航角速度;副翼控制橫向通道,反饋傾側角及滾轉角速度。
圖1展示了輸入為1°傾側角指令時,系統的狀態響應及舵偏角曲線。
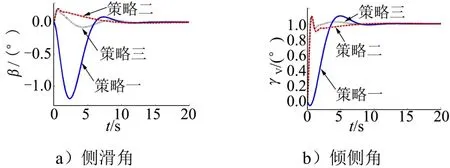
圖1 狀態響應及舵偏角曲線( dLCDP<0)Fig.1 The State Response, Rudder and Aileron Curve (dLCDP<0)
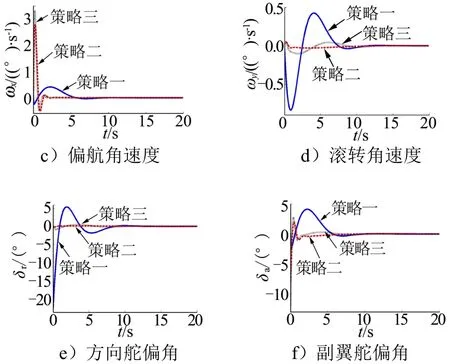
續圖1
由仿真結果可知:
a)副翼主導控制(策略二)與常規控制(策略三)對比:二者在橫向通道的表現較為類似,傾側角、滾轉角速度及副翼舵偏角曲線十分靠近,后者的傾側角跟蹤略顯快速;在側向通道上,后者引入側滑角到方向舵的反饋,因而收斂速度更快。
b)方向舵主導控制(策略一)的機理是先產生負的側滑角,利用飛行器自身橫向靜穩定性較大( Cmβx<0,a13=-9.57)的特性,進而產生正的滾轉力矩,實現傾側角跟蹤階躍指令。與策略二、三相比:策略一需要較大的側滑角,另外 Iy與 Ix的比值較大,因此其橫側向通道的收斂速度均慢了不少;階躍響應初期,傾側角偏差反饋使得方向舵負偏角較大,而側滑角尚未大幅增加,正的力矩系數導數(b11=0.4382,0)產生負的滾轉力矩,導致傾側角出現一小段負值。
3.2 LCDP大于0
此時,飛行器橫側向狀態方程參數取值為:α=9°,a13=-17.911,a23=-0.185,b11=0.3705,b21=0.09,b12=-8.361,b22=-0.2322。
根據式(8)、(11)及(13)所列的控制穩定性要求,對前文控制策略進行適當修改,得到LCDPd >0時的3類控制策略:
a)策略一:方向舵主導控制橫側向通道,反饋側滑角、傾側角及滾轉角速度;副翼增穩,反饋偏航角速度及滾轉角速度。
b)策略二:副翼主導控制橫側向通道,反饋側滑角、傾側角及偏航角速度;方向舵增穩,反饋偏航角速度。
c)策略三:方向舵控制側向通道,反饋側滑角及偏航角速度;副翼控制橫向通道,反饋傾側角及滾轉角速度;采用副翼方向舵交聯[8,9](Aileron Rudder Interconnect,AIR)技術,引入控制器參數KAIR,利用方向舵克服副翼的不利偏航力矩。
圖 2為副翼方向舵交聯控制結構框圖,圖 3為dLCDP>0時的狀態響應及舵偏曲線。
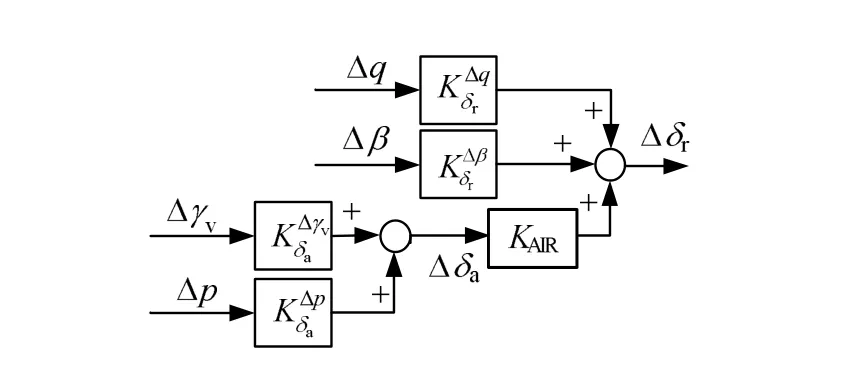
圖2 副翼方向舵交聯控制結構Fig.2 Structure of Aileron Rudder Interconnect Control
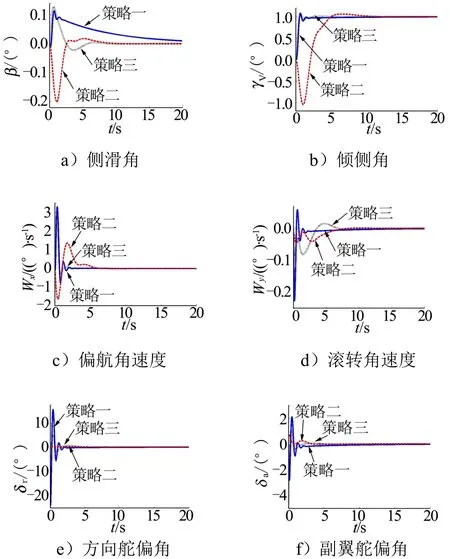
圖3 狀態響應及舵偏曲線( dLCDP>0)Fig.3 The State Response, Rudder and Aileron Curve (dLCDP>0)
由圖3所示的仿真結果可知:
a)方向舵主導控制(策略一)與常規+AIR控制(策略三)對比:二者在橫向通道的表現較為類似,傾側角與滾轉角速度曲線十分靠近,副翼舵偏角僅在仿真初始時刻(0.1 s以內)偏差較大,隨后變化趨勢一致;在側向通道上,前者的方向舵需完成橫側向兩通道姿態穩定,因而其舵偏角更大,但側滑角收斂速度仍慢于后者。
b)對于策略一:雖然其側滑角始終為正值,且方向舵偏角為負值,橫向靜穩定性(=-17.911)與力矩系數對方向舵偏角導數(=0.3705)產生的是負滾轉力矩,但由于偏航角速度到副翼的反饋(根軌跡如圖 4所示)提升了系統穩定性,副翼舵偏角為負值,且力矩系數對副翼舵偏角導數為較大的負值(),使得綜合的滾轉力矩為正,傾側角正向增大。策略三的情形與之類似。
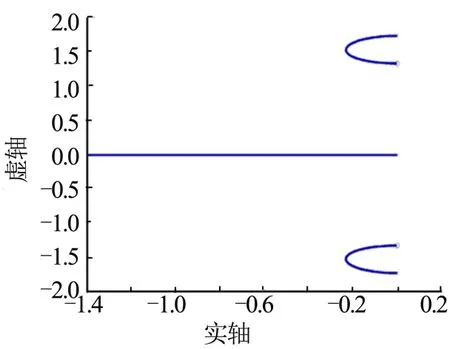
圖4 副翼反饋偏航角速度根軌跡Fig.4 Root Locus Diagram for the Feedback from Yaw Angular Velocity to the Aileron
4 結束語
本文以面對稱再入飛行器為研究對象,首先從橫側向狀態方程出發,基于全狀態量反饋,推導了方向舵控制、副翼控制及常規控制的穩定條件。隨后,針對LCDPd <0與LCDPd >0兩種工況,各自設計了方向舵主導、副翼主導及常規(+AIR)3類橫側向控制策略。最后,仿真算例顯示3類策略均可實現姿態穩定控制,驗證了穩定控制條件對不同特性飛行器的有效性與適應性。文中的研究,亦可適用于升力體、融合體、翼身組合體等其它高升阻比面對稱構型飛行器,對工程實際應用具有一定參考價值。
猜你喜歡
教學考試(高考化學)(2021年2期)2021-05-30 06:15:52
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·高一版(2020年3期)2020-04-21 08:03:20
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
數學大世界(2018年1期)2018-04-12 05:39:14
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
