未來課堂智能教學系統設計研究
2019-07-17 07:54:02持劉勉張際平
中國電化教育 2019年7期
持劉勉 張際平
關鍵詞:未來課堂;人工智能;手勢識別;教學模式
一、引言
當今時代是科技高速發展的時代,特別是信息技術研發成果的突現,使社會各領域都發生了翻天覆地的改變。2016年,谷歌公司研制開發的AlphaGo智能圍棋系統戰勝人類頂級棋手李世石,使人工智能在全世界范圍引發了廣泛關注,從事教育技術研究的專家學者也對人工智能促進教育教學的變革寄予厚望。人工智能中有一個重要的子集稱為模式識別,指采用某種算法,將對象與已有模式進行對比、匹配、辨別,從而判斷其歸屬的過程。而手勢識別作為模式識別的分支,已逐漸融入教育領域。
手勢,狹義指手指、手掌及手臂的姿態及運動,廣義上身體各部分的姿態與運動方式都可稱為手勢,如表情、步態等。手勢識別可定義為在自然的人機交互狀態下,利用計算機系統來識別人類手勢的一種技術。《地平線報告(高等教育版)》已于2010年至2012年將“基于手勢的計算”列為長期關鍵技術,2017年又將與手勢識別密切相關的“自然用戶界面”列為長期關鍵技術。手勢識別技術能夠四次出現在有著教育技術風向標之稱的地平線報告中,說明國際教育技術學界始終對該技術保持著較高的關注度。最后,從優化智能算法與擴展應用范圍兩個方面對后續研究進行了展望。
二、手勢識別技術研究演進分析
通常來說,一個學術領域隨著研究不斷的深入,會逐漸涌現各類具有代表性的指標信息,本研究所參考的文獻來源為Web of Science核心合集,以關鍵詞“Gesture Reco~aition”“Gesture Based Computing”和“Education”“Educational”“Teach”“Teaching”“Learn”“Learning”等搭配組合,時間跨度從1950年至2017年,共檢索出577篇文獻,然后二次精煉出緊扣主題的文獻113篇,利用WOS文獻統計功能和CiteSpace 5.1.R8 SE文獻計量工具對這113篇文獻進行挖掘,從年發文量、熱點演進等方面對手勢識別技術在教育中的應用研究進行分析。
(一)年發文量分析
如下頁圖1所示,利用WOS的創建引文報告功能可得出依時間序列分布的年發文量柱狀圖。從圖中可見,2006年至2009年為孕育階段,2010年至2013年為萌芽階段,2014年至2017年為發展階段。時間意義上的第一篇文章是Stevens等人于2006年發表的“虛擬患者——傳授醫科學生獲取病史情況與問詢技能的應用”,其中談到研發成功了診斷急性腹痛病人的虛擬診斷室,攝像頭將捕捉到的學生頭部和手部動作與虛擬病人進行互動,實時反饋診斷效果,達到培訓有效技能的目標。不過,正如Page等人所說“手勢識別技術在教育上的運用還處于幼兒期”,到目前為止發文數量并不很多,談不上成熟,還有待進一步的研究。
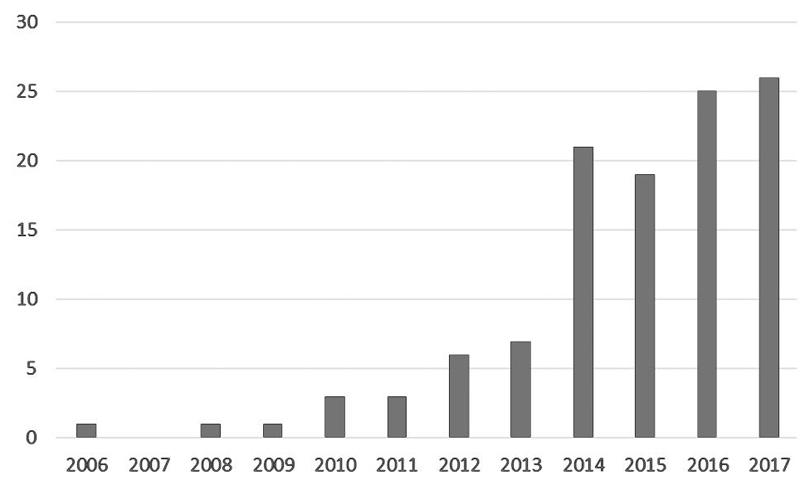
年發文量
(二)熱點演進分析
熱點反映該研究領域的關注對象,隨著時間的推移,熱點也會發生更迭。利用CiteSpace的熱點演進聚類功能,將結點類型選擇為關鍵詞,閾值插值將前、中、后三組時間段上的C,CC,CCV分別設置為2,2,10;2,2,20;3,3,20,得到可信度較高的關鍵詞共現網絡圖譜,如圖2所示。排在出現頻次前十位的關鍵詞分別為:Kinectf頻次13)、Performance(頻次12)、Virtual reality(頻次11)、Education(頻次9)、Video game(頻次7)、System(頻次6)、Perception(頻次5)、Gesture Recognition(頻次5)、Physical Activity(頻次5)和Surgery(頻次4)。研究熱點年份分布如下表所示,從表中可知,2013年以前熱點稀少,2014年突然增加,這與2014年發文量大幅上漲相吻合,表明從2014年開始獲得較多的關注;2015、2016兩年雖然熱點涌現不多,但發文量仍保持高位,可認為是對已有的熱點進行深度挖掘;2017年熱點又呈現增多趨勢,說明仍處于高速發展階段。
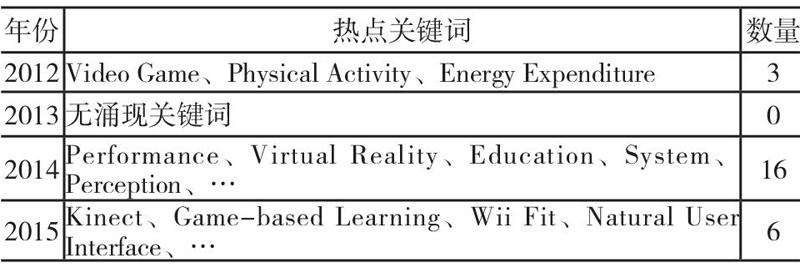

研究熱點年份分布統計表
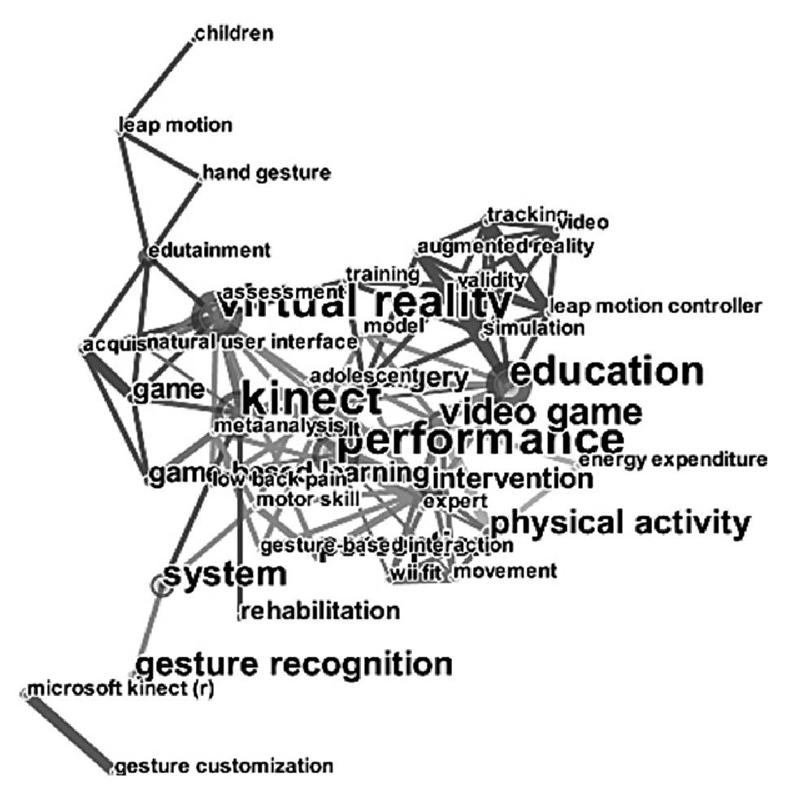
關鍵詞共現網絡圖譜
檢索出的文獻依據研究目的可以分為兩類:第一類聚焦于如何有效提升學生手部(身體)熟練程度,多見于特殊課程。如Yasser Salem等指出使用手勢體感設備訓練的發育性協調障礙兒童對比以傳統方式訓練的同樣缺陷的兒童在雙手握力等方面獲得了顯著的提升;第二類則關注于怎樣構建起提升學習體驗感的自然用戶界面,多見于普通科學課程。如AI-Khalifa構建了一個虛擬化學實驗室,手勢識別設備追蹤學生手部操控虛擬實驗儀器等動作,并實時反饋化學反應結果,學生對于化學學科的學習積極性有一定的提升。上述兩類研究方法都為學生利用手勢設備與虛擬情境互動,區別僅為各自獨特的研究目的和評價方式。不過,真實環境中的教學研究一直都是教育領域的核心主題,而將手勢識別技術融合進真實的教學過程,以求對現實境脈中的教學活動產生積極影響的相關研究卻非常稀少。因此,針對此欠缺內容,下文將從如何將手勢識別技術融入未來課堂真實環境下的教學活動的角度展開研究。
三、手勢識別技術融入未來課堂
(一)未來課堂中人工智能研究現狀
手勢識別隸屬于人工智能范疇內的模式識別,而利用人工智能提升教學效果的理念已被全球大多數國家所認可并進行了一定程度的實施,如美國在2016年發布了《國家人工智能研發戰略規劃》,提出應擴大人工智能和數據科學課程,培養為推動經濟發展所需的能勝任人工智能應用與研究的人才”。我國也于2017年由國務院頒布了發展人工智能的綱領性文件《新一代人工智能發展規劃》,提出要發展智能教育,利用智能技術加快推動人才培養模式以及教學方法的改革。由此可知,將人工智能引入教育領域是大勢所趨,是教育技術發展的必經之路。作為國內教育技術研究主體力量之一的華東師范大學張際平教授領銜的未來課堂研究團隊,在未來課堂的概念界定階段就將智能化確定為未來課堂所必須具備的要素之一,提出未來課堂所包含的六大特性分別為人性化、混合性、開放性、交互性、智能型和生態型。然而,盡管未來課堂相關領域已有大量卓有成效的研究成果問世,在CSSCI數據庫中以未來課堂為關鍵字就可檢索出近40篇論文,但這些研究大多關注于空間建構、互動教學、可視化等方面,而對于智能教學的研究卻非常欠缺,CSSCI數據庫中與人工智能密切相關的未來課堂研究不足3篇,并且都是以宏觀的概念闡述為主要內容,而深入探討與未來課堂環境相匹配的人工智能算法及其教學模式的文章則沒有。針對未來課堂智能教學研究的局限,我們將以手勢識別為技術支撐,以解決未來課堂實際教學中產生的問題為研究目標,嘗試從智能技術和教學模式兩方面對未來課堂的智能化進行詳細探索。
(二)待解決的問題
隨著國家對于教育信息化的大力推進,越來越多的學校建設了未來課堂,并在其中開展了諸多的教學活動,如STEM課程、遠程互動課堂等等。未來課堂中教學形態多為小組協作式學習,可靈活組合的桌椅和多屏空間的設計也支持此種學習方式。每個學生小組對應一塊一體機大屏,學生利用手中的PAD將自己的作品投射到大屏上,以供集體討論。教師作為管理者、指導者,在小組問穿插走動,幫助學生進行探究學習。在實際的教學活動中,多數學生的學習積極性較高,但仍有個別學生的學習積極性不夠,表現出與其它小組成員差異明顯的行為動作,如伏案睡覺等。該類行為的心理成因可用具身認知解釋,具身認知的核心原則為心智是身體的心智,認知是身體的認知,認知、身體、環境是一體的。身體的動作與心理的認知兩者相匹配,身體的動作隱喻出對應的心理狀態。據此可得出在小組活動中,若某學生呈現出持續的相較其它同學的明顯差異行為,說明其在該段學習活動中的心理認知與其它同學有較大區別,這種差異行為動作通常來說為厭倦、淡漠、焦慮等負面心理狀態的身體表現。教師作為教學的組織者,理應對出現明顯差異行為的學生予以干預,幫助其克服心理認知上的缺陷,但我們從回看未來課堂錄播平臺的教學視頻中發現有相當數量的教師并未注意到課堂中所有的存在明顯差異行為的學生,當然也就未對此類學生實施有效的干預。通過仔細分析教學視頻和對部分教師進行訪談,得出教師未及時對有明顯差異行為學生進行干預的原因主要有兩個:一是教師的觀察范圍不足。當教師對一個小組進行指導時,他對該小組學生的狀態把握準確,但對超出視野范圍的其他小組的學習情況則忽視較多;二是源于教師的精力缺乏。教師在小組學習活動的指導過程中,需要在多個小組之間走動,不斷幫助小組成員解決各種問題,導致教師的精力消耗較大,從而對有差異行為的學生關注度不夠。怎么利用先進的ICT技術幫助教師最大限度的察覺到存在明顯差異行為的學生,是本研究所要考慮的核心目標。我們考慮運用手勢識別技術,設計人工智能算法,借助未來課堂中架設的多個高清攝像頭、高速網絡、高效后臺處理器等先進設備來智能辨識出有明顯差異行為的學生,對教師以及時有效提醒,幫助教師對此類學生實施精準的干預。
(三)智能技術
本研究所關注的對象是學生的身體動作姿態。身體動作姿態歸屬于手勢動作,可利用手勢識別技術智能辨識出小組活動中有明顯差異行為的學生。具體操作為使用高清攝像頭對小組活動進行多次拍攝,利用后臺高性能處理器對拍攝的圖像運用智能算法進行識別,若在圖像中識別出持續的明顯差異行為,則推送預警信息給教師的PAD,以提升教師對課堂活動的掌控能力。此實施方案中,我們結合未來課堂技術環境并參考卷積神經網絡模型對手勢識別技術進行智能算法構建。卷積神經網絡是深度學習領域內對于圖像識別最重要的算法之一,已成功地運用于人臉識別、車牌識別等多個領域。本研究中,針對未來課堂高清攝像頭捕獲的小組活動圖像,使用預先處理好的差異行為圖像作為卷積核(卷積核用于找出源圖像中與自身紋理最相似的部分),執行卷積、池化、小規模全連接及誤差后向傳播等運算,直至網絡收斂,得出識別結果。智能算法流程如下頁圖3所示,實線部分為信息向前傳遞和虛線部分為誤差向后傳播。
1.信息向前傳遞
信息向前傳遞的過程為將攝像頭捕獲到的小組活動圖像上傳至后臺高性能處理器,經過若干卷積與池化運算,轉換為信息量比原始圖像小得多的特征圖譜,再經由規模較小的全連接運算,得出輸出值。將輸出值與預期值做比對,根據比對的結果確定是否進入誤差反向傳播階段。
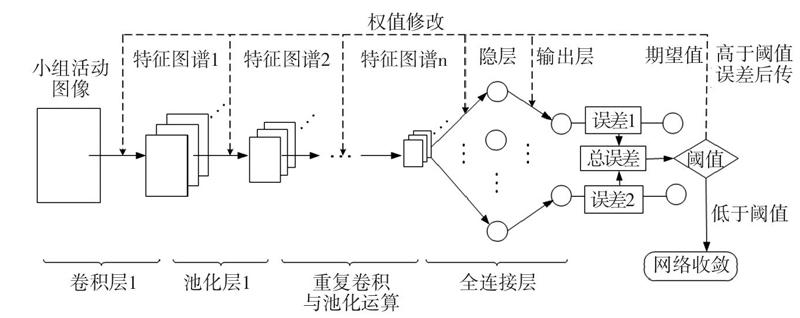
智能算法流程
(1)卷積運算
卷積過程就是卷積核圖像沿著某一方向依次“劃過”前一層圖像,執行與對應前一層圖像像素的點積,再經過激活函數的非線性變換,得到遠小于前一層信息量的后一層圖像,簡明算法如式1所示。其中,0代表后一層圖像像素矩陣,x代表前一層圖像像素矩陣(深度為D),w代表卷積核圖像矩陣(深度為D),b代表偏置項,激活函數采用S函數。
(2)池化處理
池化表示對前一層圖像上的一個給定區域求出一個能代表這個區域特點的值,以此作為后一層圖像的一個像素。本研究采用最大值池化,濾波矩陣為2*2(大于2*2可能偏離特征較多),簡明算法如式2所示。其中,a代表后一層圖像一個像素,x代表前一層圖像一個像素,采用max函數,并且前后層深度相同。
(3)全連接層
全連接層運算的目的是得出小組圖像屬于有/無差異動作的各自概率,再與期望的概率相比較,以判斷后續過程。本研究中全連接設定為三層:第一層是輸入層,為特征圖譜轉換成的一維列向量;第二層為隱層,節點數目可根據需要自定;第三層為輸出層,由于設置了有/無兩類,所以輸出層為兩個神經元,簡明算法如式3所示。其中,0代表后一層神經元的輸出矩陣,x代表前一層神經元的輸出矩陣,W代表前后層之間的連接權值矩陣,b為偏置項,采用S函數為激活函數。
2.誤差后向傳播
信息向前傳遞至輸出層,使用激活函數得出實際值,然后將實際值與期望值進行比對,得出每個輸出神經元的誤差值,再計算網絡總誤差。若總誤差低于閾值,表明分類正確,則接受此分類,網絡收斂,訓練結束;若總誤差高于閾值,表明分類錯誤,則拒絕此分類,此時應將反映期望值與真實值關系的損失函數生成的總誤差值反向傳播至網絡中,以此更新權值,經數輪迭代達到誤差最小值,網絡收斂,訓練結束。
(1)損失函數
本研究采用均方誤差(MSE)作為損失函數,該函數圖像平滑連續,越接近最小值,變化越小,有效避免過度調節的風險。函數如式4所示。其中,E代表總誤差,t代表期望值,o代表實際值,共有n個輸出神經元(本研究n為2)。
(2)權值修正
在深度學習算法中,梯度是指對于網絡中的參數,誤差值上升最快的方向。但最終是求誤差的最小值問題,所以只需要將參數沿著梯度的反方向前進合適的距離就能達到目的。深度學習算法需修正的主要參數為各神經元之間的連接權值,所以可利用梯度下降算法,使權值沿負梯度方向改變。由于梯度與變化率有關,所以可用導數對其進行詮釋。簡明算法如式5所示。其中,w代表更新后的連接權值,w代表更新前的連接權值,E代表總誤差,n代表學習率(0
因為已預先知道待識別的圖像屬于有或無差異行為的類別,所以本研究算法屬于監督學習。可將捕獲到的大量未來課堂小組活動圖像分為訓練集和測試集,先使用訓練集的圖像數據對系統進行反復訓練,直至網絡收斂,再將該系統用于識別測試集的圖像數據,若正確率高于可接受的值,則可將該系統部署到整個未來課堂體系中,從人工智能的角度提升未來課堂的技術先進性;若正確率低于可接受的值,則應對系統進行改進,以期達成實際可用性。
(四)“FCIT”教學模式
未來課堂的教學理念是通過在課堂中合理運用ICT技術,使學生的能力與素質得到有效的提升,使教師的教學在智能技術的支持下更加的精準與便利。若要在未來課堂中引入基于手勢識別技術的智能教學系統,勢必要構建適應未來課堂環境的新型教學模式,使其能夠對未來課堂教學活動產生切實可行的幫助。
未來課堂智能教學系統的層次結構如圖4所示。智能教學系統為五層結構,分別為算法層、設備層、環境層、教學層和評價層。該層次結構表明若將手勢識別技術融入未來課堂,應以智能算法為系統基礎,以高清攝像頭、高速局域網和后臺高性能處理器等先進設備為運行載體,以多屏空間與平板呈現為泛在學習環境,以提供教師預警信號和引導學生小組評比為教學手段,最終促使有明顯差異行為的學生的學習態度得以轉變。根據具身認知理論,學習者內部的心理認知與外部的行為表現實際是一體的,觀察學生外部的行為表現可部分推知其內部的學習心理狀態。崔允都教授指出課堂觀察應是一種團隊合作,它由彼此分工又相互合作的團隊實行。未來課堂研究方向始終聚焦于真實環境中的課堂,因此,崔教授所構建的“課堂觀察”同樣可以被借鑒于未來課堂環境。本研究中的教學合作者為智能系統和系統管理員,涉及到的要素主要有四個,分別是教師、學生、智能系統和系統管理員,要素之間以相互關聯的形式構成教學生態圈。智能系統負責識別有明顯差異行為的學生,將識別到的結果反饋給教師,教師根據獲得的反饋信息以適當的方法對學生進行干預,使其發生積極的轉變。系統管理員作為教師和智能系統之間的橋梁,與教師展開合作,目的是更好地管理與調整智能系統,以使系統更貼合課堂及教師的需要。根據未來課堂智能教學系統層次結構及參考課堂觀察有效實施原則,我們構建出基于手勢識別技術的“FCIT”模式,即未來課堂智能教學模式,如圖5所示。在該模式中,未來課堂智能教學系統共包括課前、課中和課后三個階段,每個階段由教學參與者合作構建完成,在發揮各自優勢的基礎上,搭建起整體框架,精準改善學生的學習態度,提升學習積極性。
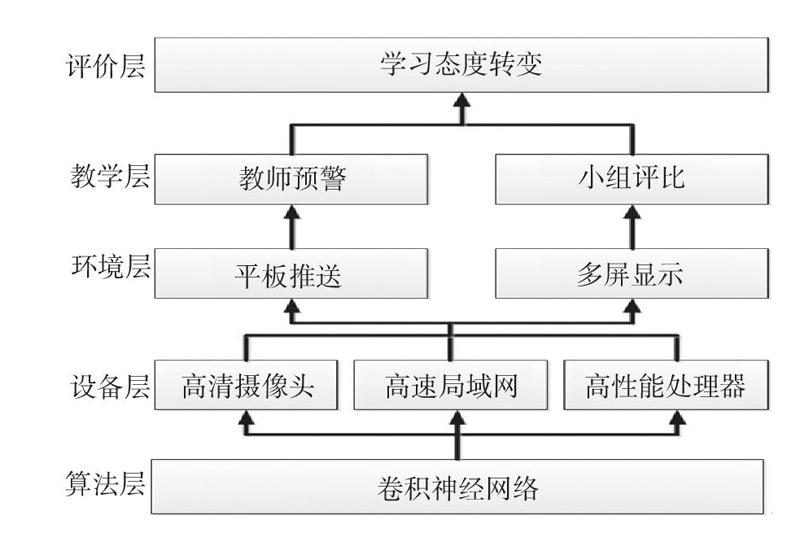
智能教學系統層次結構
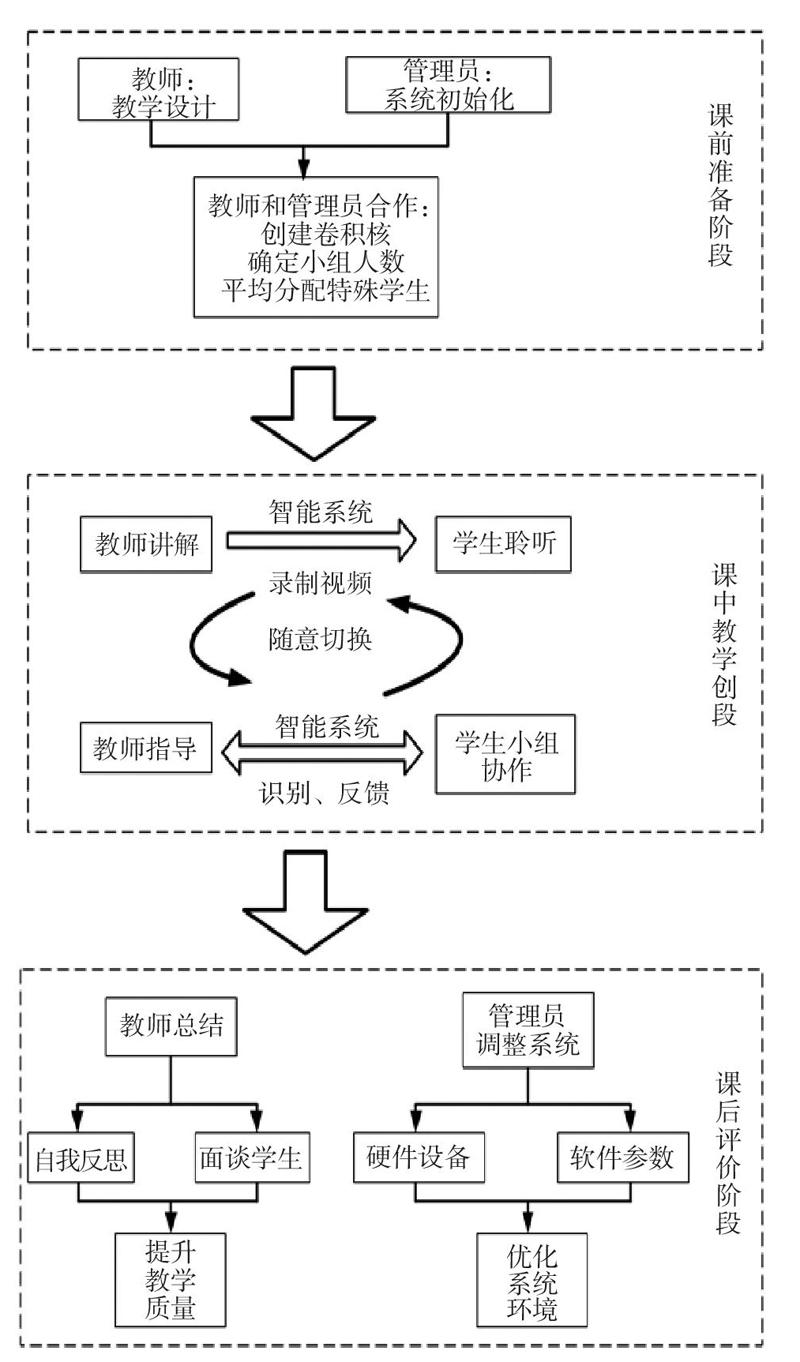
“FCIT”教學模式
1.課前準備階段
課前準備階段是教學參與者對即將到來的正式教學階段可能出現的情況和采取何種教學手段的預估,參與人員包括指導教師和系統管理員。在此階段中,首先教師確定教學內容及設計活動方案,系統管理員則負責初始化系統。然后兩者合作開展創建卷積核圖像、確定小組人員數量、平均分配特殊學生等工作。(1)創建卷積核圖像:系統管理員可在教師的輔助下利用圖像軟件從以往小組活動圖像中摳出具有明顯差異行為的學生輪廓,預處理后將其作為卷積核導入算法系統中,以備后續使用;(2)確定小組人員數量:應依據未來課堂環境中已部署的攝像頭和大屏數量來確定小組人員數量。根據研究需要,每個攝像頭負責只拍攝—個小組的圖像,并且每個小組獨立使用一塊大屏進行小組討論與展示。未來課堂中配置的攝像頭和大屏數量通常為四至五個,并且未來課堂提倡中小班額的教學方式,全班人數最好不超過40人,所以每個小組的人數應為10人以下;(3)平均分配特殊學生:估計可能出現明顯差異行為的特殊學生,將這些學生平均分配到各小組中去。可能出現明顯差異行為的學生可通過兩種方式估計得出,即經驗法和測試法。經驗法是教師對該班級每位同學以往在未來課堂中學習的情況進行評估,以概率的方法挑選出有可能出現明顯差異行為的同學。或者進行課前小測試,以合作探究活動測試等方法挑選出有明顯差異行為的同學,根據挑選結果,將他們平均分配到各小組中。如此,可使每個攝像頭能夠捕獲到平均數量大致相等的異常行為圖像,保證了小組同質性并均衡系統負載。
2.課中教學階段
在做好課前的準備工作后,便進入正式的課中教學階段。未來課堂的教學活動方式一般來說采用的是“教師講解+小組協作”,先由教師對關鍵的知識點進行講解,同時利用多屏環境,將有關聯的知識點順序呈現在多個大屏上,學生按自己的進度吸收知識,以使思維不斷裂;然后教師根據教學情境提出問題,將大屏的控制權釋放給學生,引導學生進行小組協作學習,教師則以觀察者和指導者的身份對學生進行管理與幫助。教師講解與小組協作可交替進行。小組協作可考慮采用PBL(基于問題的學習)方式開展學習活動。PBL學習活動既需要小組成員問進行互動協作,也需要學生個體能夠進行一定程度的自主學習。未來課堂中靈活擺放的桌椅支持協作學習的發生,給學生配置的平板電腦創造了自主學習的條件,每組對應的大屏提供了便于小組討論和作品展示的可視化平臺。在未來課堂的PBL小組協作活動中,由教師創設活動情境,提出問題,學生根據該問題開展相應的學習活動。鑒于未來課堂的富技術環境,可構建關于此情境的教學平臺,教師和學生通過手中的平板電腦登錄進該教學平臺,以便收發相關數據資料。教師利用教師端平板發送問題至學生端的平板,學生在接收到相關情境問題后則進行小組協作式探究學習(包括合作學習、自主學習及利用大屏的展示討論學習)。
在本研究的課中教學階段,參與教學合作的為指導教師和智能系統。在講解階段,由于教師所處的位置一般都在講臺上,其觀察范圍可覆蓋整個課堂,能夠較好地把控整個課堂的學習情況。所以,這段時間里智能系統只需發揮錄制課堂視頻的功能,不需開啟智能識別功能。在小組協作學習階段,由于教師所處的位置一般在某小組中,其觀察范圍變窄,限制了教師對整個課堂的掌握。此時,就是系統的智能化發揮作用的時候,讓其輔助教師對其他小組進行觀察,以技術手段擴展教師的感官視野。智能功能的開關,可集成到教師端PAD,方便教師自由操控。在小組協作學習中,若學生出現明顯差異行為,根據具身理論,可知其心理狀態可能發生了某種改變。但如果學生只是偶爾趴在桌上或伸伸懶腰等,心理狀態的改變可能是暫時性的,并不表明產生了顯著改變。只有當學生較長時間反復多次出現明顯差異行為,才能判斷其心理狀態發生了顯著變化。因此,當智能系統識別并統計出某學生在單位時間內出現的差異行為次數已超過預警值時,便立即推送—個預警信號給教師端PAD,該預警信號包括組號、單位時間內出現差異行為次數等信息,并可輔以振動等提示信號,以便教師做出及時判斷。教師在接收到預警信號后,可根據提供的內容及當前課堂的學習活動狀態采取相應的干預措施,在不對正常教學秩序產生重大干擾的前提下對產生持續明顯差異行為的學生實施干預,以幫助其調整心理狀態。學習活動結束后,可將每組在學習活動中產生明顯差異行為的相關情況以可視化的形式呈現在各小組對應的大屏上,并根據統計數據在小組的活動評比項上增減相應的分值,以此激勵小組成員相互關懷,促進學生集體榮譽感的增強。教師的課堂干預與小組活動評比,都是為了使有持續明顯差異行為的學生的學習態度能夠從消極轉向積極,而學習態度轉變成功與否可通過隨后課程中的小組協作活動情況統計得出。
3.課后評價階段
在正式的授課結束之后,應對本次教學過程中實際產生的成果與預期成果之間的差距進行評價,根據評價結果對智能教學系統進行改進。參與課后評價活動的成員主要為指導教師和系統管理人員。教師根據系統給出的課堂活動信息,以自我反思、對差異行為學生進行面談等方式,找尋教學活動中學生產生持續差異行為的可能原因,如教學設計是否周全,學生自身心理認知是否缺失等,再根據得出的原因對教學設計、教學過程等進行改進,以期提高教學質量,提升學生的學習積極性。得益于智能算法可自行學習的優點,系統管理員針對智能系統的調整改進的內容并不多,主要集中在對硬件性能的升級及軟件參數的調整兩方面。硬件性能的升級是對現有未來課堂的攝像頭、后臺處理器、網絡規格、一體機大屏、平板電腦等進行更新換代,力求在學校人力財力允許的條件下達到最佳的配置要求;軟件參數的調整則主要包括兩個內容:一是對作為卷積核的圖像進行優化,如學生出現明顯差異行為時,系統并沒有及時識別到,就有可能是卷積核圖像與差異行為圖像的匹配度較低,因此可考慮重新選擇更具代表性的卷積核,或對已有卷積核的圖像進行調整,使其能更精準地反映實際的差異行為;二是對采集圖像的單位時間和觸發預警的差異行為頻次進行調整,單位時間過短導致識別到的差異行為次數過少,過長則使系統資源消耗過大。觸發預警的差異行為頻次設置過大可能造成教師無法作出及時干預,而設置過小則可能使教師產生錯誤判斷,即對偶爾出現的差異行為作出不必要的干預措施。因此,采集圖像單位時間長度和觸發預警的差異行為次數應依據實際的教學過程作出相應的調整,使參數值位于合理的區間。
本研究所構建的基于手勢識別技術的“FCIT”教學模式,是以未來課堂學習空間為環境支持,人工智能算法為診斷策略,充分協調課堂教學中各要素之間的共生關系,從信息技術的角度幫助教師及時察覺并精準干預存在持續差異行為的學生,據此促進學生的學習積極性獲得有效改善。
四、結論與展望
人工智能經過數十年的發展壯大,已經逐漸深入到社會的各個領域,在教育中的應用也被更多的研究者所重視。而作為人工智能分支的手勢識別技術,已被地平線報告數次提到,相關的教育應用也取得了一定的成果。教育領域內針對手勢識別技術的研究,屬于多學科跨領域研究范疇,既包括人工智能領域內的模式識別,也包括教育科學中的教學研究,同時也會涉及到心理學中的人類行為研究。將手勢識別技術融入未來課堂環境,既確保未來課堂的信息技術領先性,又為未來課堂的教學模式研究提供了新的視角。結合教育信息化與未來課堂的發展趨勢,對手勢識別技術更完善融入未來課堂提出以下建議。
(一)優化智能算法
本研究參考卷積神經網絡模型構建了基于計算機視覺的具備學習功能的差異行為識別系統,其學習功能體現在經過信息前向傳遞與誤差后向傳播,利用梯度下降算法自動更新神經節點之間的連接權值,從理論匕來說最終將達成正確識別的效果。但仍需進行優化,主要考慮的優化內容是盡量避免算法模型的欠擬合與過擬合。欠擬合是因為算法模型過于簡單,表達能力不足,無法學習到足夠多的訓練數據的特性,勢必會遺漏大量的具有差異行為的圖像。過擬合則是算法模型較復雜,對于訓練數據擬合度非常強,卻可能喪失了對新數據的泛化能力,也就無法將之推廣到更多的未來課堂當中。相對來說,優化欠擬合比優化過擬合更容易實現。若要優化欠擬合,只需要增加模型復雜度,如增加隱層層數、每層神經節點數量等,便可得到很好的解決;而對于過擬合則不是能輕易解決的問題,當前主流解決方案是迭代次數截斷、神經元去除、數據集擴增等方法,這些方法只是從一定程度上避免了過擬合,并未完全解決問題。因此,關于算法模型的優化,應該根據未來課堂實際教學環境、教學過程等進行有針對性的調整,這將是下一步繼續研究的主要內容。
(二)擴展應用范圍
以培養學生創新能力,提倡動手實作的創客教育正在全球廣泛開展,未來課堂也已加入創客教育的行列,構建了基于富技術、以人為本特性的未來課堂創客教育空間。創客教育是培養學習者成為具有創新精神和創新實踐能力的教育,創新離不開動腦,實踐離不開動手,學生們通過合理的用腦,靈巧的動手,創造出既新穎有趣,又富含科學知識的創意產品,這便是創客教育的核心宗旨。將手勢識別技術融入未來課堂創客教育,可從腦和手兩方面促進學生的創新能力。學生們為了熟悉理解手勢識別設備,勢必會對其構件、原理等進行鉆研,這就涉及到對計算機程序、人工智能算法等的學習。通過此類學習,學生腦內的信息技術認知得到建構,培養了計算思維習慣,對人工智能算法有了初步的印象,使其能夠更快地適應當今飛速發展的信息社會。當前的未來課堂創客教育,在培養學生合理的動腦方面已有所實施,如機器人項目中的scratch系統工具等,就是以培養學生程序設計能力為目標。然而,對于學生動手搭建產品動作背后所隱喻的心理特征并未進行詳細的研究。引入手勢識別技術后,可以通過傳感器對學生搭建過程中手部或身體動作的捕獲,在心理學理論的指導下對捕獲的數據進行分析處理,推測出學生在搭建活動中所反映的心理狀態,為探究學生在未來課堂創客教育活動中的心理特點提供重要的參考意見,以此提高學生手部動作的熟練度和增強創造能力。
綜上所述,將人工智能中的手勢識別技術融入未來課堂教學是未來課堂發展的必然趨勢,從技術層面和教學模式層面都起到積極的提升作用。而對于智能算法的優化、應用范圍的擴展將成為后續研究的目標。
猜你喜歡
音樂探索(2022年2期)2022-05-30 21:01:37
小天使·一年級語數英綜合(2019年8期)2019-08-27 02:23:00
商界(2019年12期)2019-01-03 06:59:05
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
IT經理世界(2018年20期)2018-10-24 02:38:24
小學科學(學生版)(2018年7期)2018-08-13 09:33:04
小康(2017年16期)2017-06-07 09:00:59
