基于TRIZ和ANSYS的老年人外骨骼助行器足底踏板設計
2019-07-31 02:21:52張思睿崔志強
承德石油高等專科學校學報 2019年3期
鄭 昊,李 婕,王 睿,張思睿,崔志強,趙 瑋
(1.承德石油高等專科學校 a.電氣與電子工程系;b.機械工程系,河北 承德 067000;2.湖北工業大學 工業設計學院,湖北 武漢 430068)
外骨骼式老年人助行器是一種生物-機械-電子裝置,穿戴在老年人腿上可以幫助老年人重新站立行走,恢復運動能力和生活能力,促進血液循環,防止肌肉萎縮。人體助力外骨骼主要分為強化助動外骨骼和被動牽引外骨骼。國內外的外骨骼技術已發展到一定階段,美國和日本起步較早。目前的外骨骼式助行器主要是靠安裝于髖關節與膝關節處的電機驅動做屈伸運動,從而幫助人們完成行走動作,需靠電池提供動力,而踝關節則是被動結構或只有一個自由度。其主要針對人群為下肢障礙的殘疾人,目的是輔助其矯正步態直至獨立行走。在外骨骼助行器的發展中,研究者們通常注重通過改變結構、傳感器布置、驅動方式以及控制策略來達到腿部屈伸的動力實現,忽略了老年人這一特殊人群的生理特點。專為老年人設計的外骨骼式助行器少之又少,如韓國西江大學的外骨骼機器人、日本東北大學研制的Wearable Walking Helper、日本立命館大學研發的eXoskeleton Robot還有中國江蘇南通大學陳峰副教授設計的Walking Power Assist Leg專門提到了老年人這個受眾群體。正是由于老年人身體狀況特殊,更需要專門為其提供適于他們使用的外骨骼助行器。針對以上問題,在對老年人行走問題進行分析后,對被動牽引外骨骼機器人的結構進行再思考,提出了一種可減輕老年人穿戴助行器運動時足部疲勞的優化設計,使外骨骼式助行器更加符合老年人的需求。
1 問題分析
1.1 老年人運動機能變化
肌力流失和肌肉疲勞會導致老年人運動機能變化,研究顯示,40歲后肌肉質量平均每十年降低5%,65歲后流失速度加快。
1.2 老年人運動特征
陳勇[1]等人利用Motion Analysis三維動作捕捉分析系統記錄步態數據,并用SPSS19.0軟件分析測試對象的步態參數,得出:不論男性女性,隨年齡增長,下肢功能下降,腳掌著地動作緩慢,步長縮短,步態周期增大,單足支撐時間增長,增加了老年人足部疲勞度。
1.3 老年人足部特征
老年人足部易發生形變,主要為前掌和足弓形變,大多數老年人足弓部位下塌,觸地面積增大,沖量顯著增加,小腿肌群參與活動單位數量較年輕人多,耗能多,小腿易產生疲勞,傳遞到足部的力量減少,導致足部易疲勞,更有甚者會產生足部疼痛,這對老年人的流動性和健康狀況有顯著的不利影響[2]。
綜上所述,老年人與殘疾人的病理不同,影響其正常走路的主要原因在足部。腳是高度專業化的,受體分布主要是在腳與地面接觸的部分,結構/位置的變化會影響功能,而目前所有的外骨骼式助行器在設計時都忽略了足底踏板的人機工程學,不能真正的解決老年人行走的問題,從老年人運動功能衰減的根本原因入手,應著力于改善老年人足部疲勞度[3]。
2 老年人助行器理想方案的獲取
2.1 IFR最終理想解
IFR是科學研究中的創造性思維方法,在解決問題初期,忽略所有客觀的限制條件,理想化定義問題,從而得到最終理想解,它是TRIZ理論的經典理論體系之一,也是TRIZ的終極目標。用IFR來分析問題,會得到截然不同的創新設計方案[4]。
2.2 老年人助行器設計中IFR的確定
按照IFR分析和解決的6個步驟獲取理想解決方案。1)設計的最終目的:使外骨骼式助行器更好的為老年人進行服務。2)IFR:得到符合老年人體需求的外骨骼式助行器。3)達到IFR的障礙:老年人體特征,足部變化,下肢肌肉障礙,無力支配雙腿。4)出現這種障礙的結果:足部易疲勞,失衡。5)不出現這種障礙的條件:有一個合理的結構可與老年人足部耦合,彌補老年人足部形變,提供合理的足部物理支撐,從而改善老年人行走時足部的受力。6)創造無障礙條件的可用資源:老年人助行器足底踏板的結構、老年人。
解決方案:對傳統的外骨骼助行器的足部踏板進行再設計,使老年人在行走過程中足部與足底踏板相耦合,足底受到合理的力度支撐,前行時,足部的疲勞度得到改善。這里解決問題的資源是老年人助行器足底踏板的結構。TRIZ理論的目標是完全解決沖突,獲得IFR,當前老年人助行器存在的主要沖突是技術沖突。
2.3 技術沖突的解決方式
查詢通用技術參數,分析可得技術系統中“應力/壓力”和“形狀”構成一對技術沖突。傳統的老年人助行器的足部踏板形狀簡單但惡化了接觸部位的應力/壓力。利用沖突矩陣,并應用增加不對稱性原理,得到最終解決方案:通過增強不對稱物體的不對稱度實現應力/壓力改善。
2.4 外骨骼式老年人助行器方案

人體足弓正常狀態下步行運動時,承擔重量的主要是跟骨、第1、5跖骨及拇指趾骨,足弓吸收部分壓力,保持身體平衡。通過足底壓力結果分析可得,老年人由于足部發生形變,拇指部位壓力減小,前掌第2、3跖骨部位峰值壓力過大,足外側壓力增大,足部受力不平衡,易跌倒[5]。足底壓力分區如圖1所示。
外骨骼技術在老年人輔助行走裝置中的應用使老年人肌肉活力得到改善,可提高老年人自理能力,其機械設計須匹配老人下肢特點,從而提高老年人在穿戴過程中的舒適性。新型的外骨骼式老年人助行器在保證整體強度牢固性的前提下,將傳統外骨骼式助行器的設計中加入了人機工程設計思想,足底踏板的設計不僅對人體足部產生有效的物理支撐,同時減少了對膝關節的損害,緩解了老年人在穿戴外骨骼式助行器行走過程中的足部疲勞度[6]。
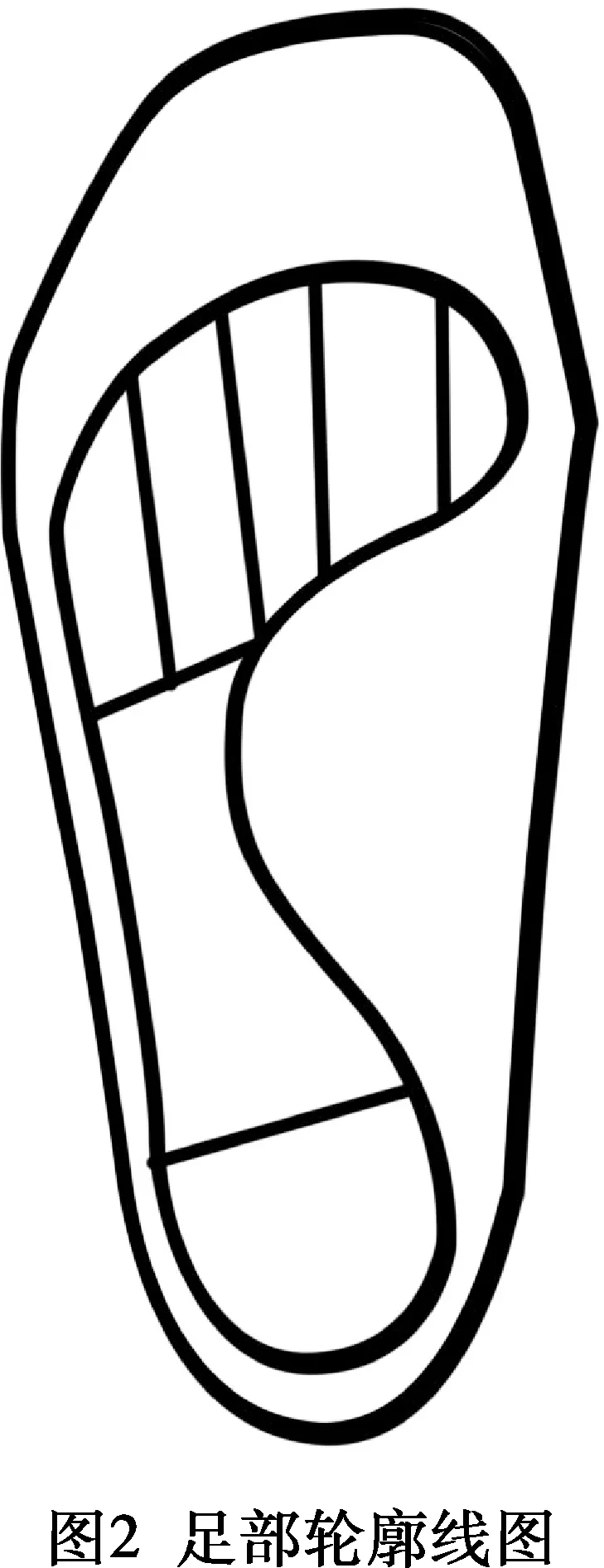
經調查結果顯示,老年人扁平足占比89%,老年男性拇趾外翻0~15°占比47%,老年男性腳長255 mm占比最大,拇趾外突點長232 mm左右,第5腳趾端點長214 mm左右,第5腳趾突點長200 mm左右,第1跖趾突點長183 mm左右,第5跖趾突出點長163 mm左右,跗骨突點長132 mm左右,踵心部位長46 mm左右,基本寬度為104 mm左右,跖趾直寬94 mm左右,第1跖趾里段寬48 mm左右,第5跖趾外段寬55 mm左右,腰窩外段寬46 mm左右,踵心部位全寬 71 mm 左右[7]。根據以上數據繪制足部輪廓線如圖2所示。
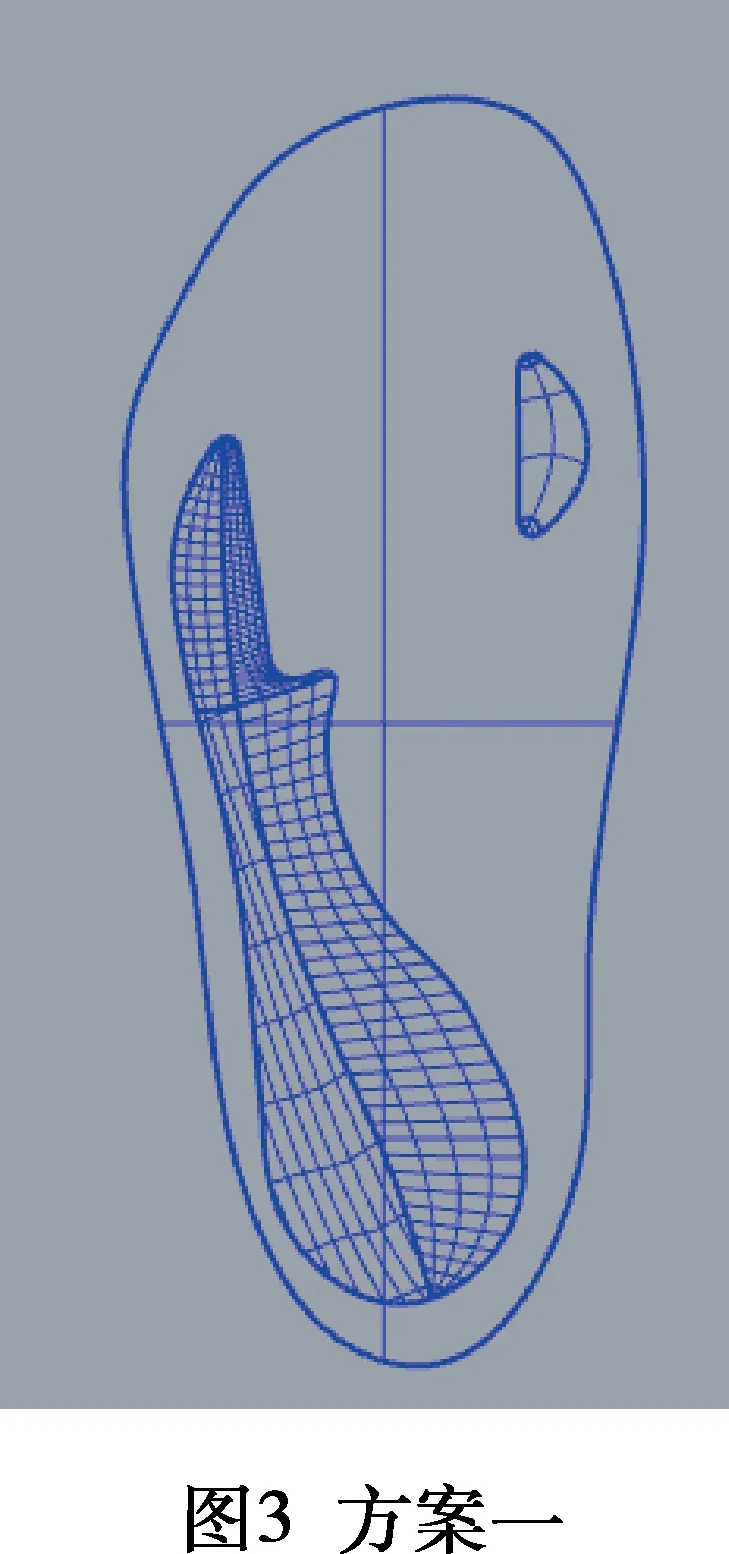
比較建模法提出用Rhino軟件進行足板建模,優勢在于能夠很流暢且方便的捕捉到關鍵點,以及對線進行編輯[8]。根據以上數據,應用Rhino軟件建立足底踏板結構模型。得到:
方案一:使可承受壓力的部分受力,如圖3所示。
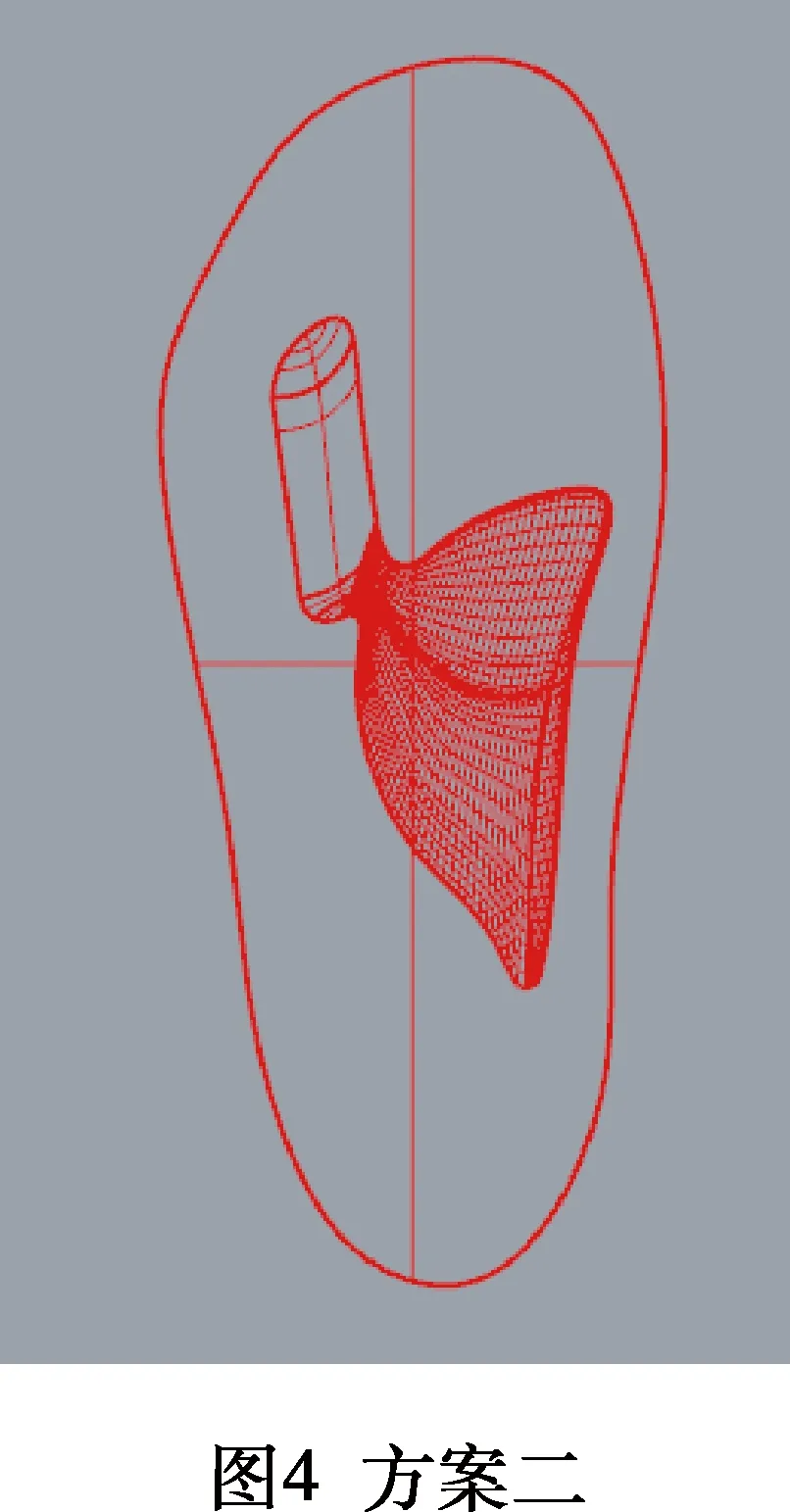
方案二:使承受壓力弱的部分分攤一部分力,如圖4所示。
3 外骨骼式老年人助行器人機仿真
ANSYS Workbench是對ANSYS經典版的繼承和發展,作為通用的計算輔助軟件,計算精度獲得了相關領域的認可,具有集成度高、易操作等優點[9]。對方案一、二兩種優化改進方案進行有限元分析計算,得到老年人助行器足底踏板結構模型應力分布云圖,對比分析,確定結構優化改進方案。
3.1 導入模型
啟動ANSYS Workbench軟件將建立好的Rhino三維模型導入到Static Structural環境下,默認材料為結構鋼[10]。
3.2 劃分網格
在ANSYS Workbench軟件中的Model工具模塊中,全部選中先前導入的足底踏板結構模型,進行網格的劃分,網格尺寸控制為60,其他參數保持不變,生成網格,如圖5所示。

3.3 施加約束與載荷
選擇足底踏板的底面作為固定端,另一端作為自由端施加載荷。和地面接觸部分可看做固定不動,與足部接觸的一面受到人自身重量的作用,設置施加載荷618 N。
3.4 添加求解項并求解
進入ANSYS Workbench下的Solution模塊,選擇正應力(Normal)計算模塊,對足底踏板結構進行強度計算,正應力結果如圖6所示。
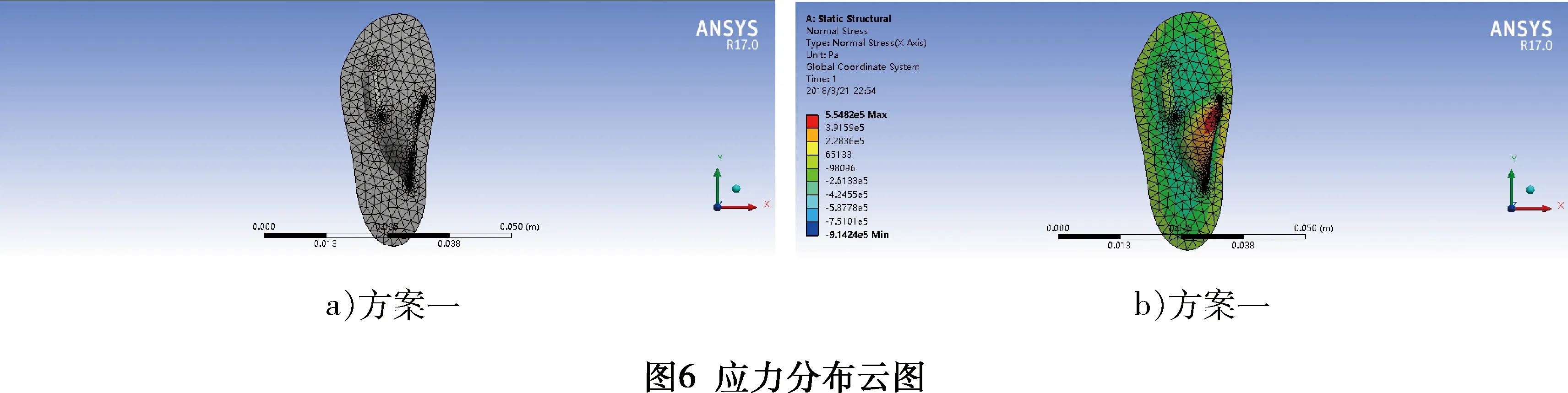
根據應力云圖分析得出,方案一較方案二更加理想。通過改變足部踏板的結構來均勻分擔足部的壓力,能夠有效緩解足部應力集中現象,可提高老年人對下肢運動體驗的滿意度,從而提高他們的運動性能。
4 結語
外骨骼足底踏板的設計符合老年人體需求,可改善老年人行走時的足部疲勞度,方便老年人對于外骨骼助行器裝置的使用,使老年人運動更加健康。由于研究區域有限,還有很多方面需要更深入的探析,后續研究可從其他不同結構或不同凹凸系數的相同結構展開。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
保健醫苑(2022年1期)2022-08-30 08:40:44
保健醫苑(2022年6期)2022-07-08 01:25:16
保健醫苑(2022年4期)2022-05-05 06:11:20
哲學評論(2021年2期)2021-08-22 01:53:34
黃河之聲(2019年23期)2019-12-17 19:08:43
中華詩詞(2019年7期)2019-11-25 01:43:04
汽車實用技術(2019年17期)2019-09-21 03:46:32
海峽姐妹(2018年1期)2018-04-12 06:44:24
黃河之聲(2017年13期)2017-01-28 13:30:17