圓感應(yīng)同步器扇區(qū)刻劃誤差的測(cè)試方法
2019-08-05 07:20:49霍炎任順清李巍
電機(jī)與控制學(xué)報(bào) 2019年7期
霍炎 任順清 李巍


摘?要:為了進(jìn)一步提高圓感應(yīng)同步器測(cè)角系統(tǒng)的精度,首先,對(duì)圓感應(yīng)同步器測(cè)角系統(tǒng)的誤差源進(jìn)行進(jìn)一步挖掘,提出圓感應(yīng)同步器扇區(qū)刻劃誤差的概念。然后,將扇區(qū)刻劃誤差項(xiàng)引入到圓感應(yīng)同步器測(cè)角系統(tǒng)的誤差模型之中,建立更為完善的測(cè)角系統(tǒng)的誤差模型,并且對(duì)誤差源在有限檢測(cè)樣本空間的正交性與耦合性進(jìn)行分析,據(jù)此設(shè)計(jì)不同起測(cè)角度的組合測(cè)試方法對(duì)誤差項(xiàng)進(jìn)行分離。最后,采用正23面棱體—自準(zhǔn)直儀檢測(cè)系統(tǒng)與391齒多齒分度臺(tái)—平面反射鏡—自準(zhǔn)直儀檢測(cè)系統(tǒng)分別對(duì)圓感應(yīng)同步器測(cè)角系統(tǒng)的角位置誤差進(jìn)行檢定,測(cè)試結(jié)果的一致性驗(yàn)證了誤差分離方法的正確性。
關(guān)鍵詞:扇區(qū)刻劃誤差;諧波分析;數(shù)據(jù)耦合;最小二乘;誤差分離
中圖分類號(hào):TM 383
文獻(xiàn)標(biāo)志碼:A
文章編號(hào):1007-449X(2019)07-0019-08
Abstract:In order to improve the accuracy of round inductosyn anglemeasuring system, a new error source of the anglemeasuring system was discovered, the concept of sector etching error in the round inductosyn anglemeasuring system was proposed, then the sector etching error was introduced into the error model of the round inductosyn anglemeasuring system, and a perfect anglemeasuring system error model was established. The orthogonality and coupling characteristics among the error sources in the limited sampling space were analyzed and a combination test method with different starting angles was designed to separate the error sources. Finally,correctness of the method was proved by comparing the angular position error measurement results with the 23mirrored polygonautocollimator measurement system and with the 391tooth indexing tablereflected mirror autocollimator measurement system.
Keywords:sector etching error; harmonic analysis; data coupling; least square method; error separation
0?引?言
為了進(jìn)一步提高圓感應(yīng)同步器測(cè)角系統(tǒng)的精度,那么對(duì)測(cè)角系統(tǒng)誤差源挖掘、檢定與補(bǔ)償是十分必要的。國(guó)內(nèi)外也有許多有關(guān)測(cè)角系統(tǒng)誤差的文獻(xiàn)。文獻(xiàn)[1]分析了引起感應(yīng)同步器測(cè)角系統(tǒng)1次和2次諧波誤差的原因,提出了對(duì)1次諧波進(jìn)行補(bǔ)償和對(duì)2次諧波進(jìn)行調(diào)整的方法,并設(shè)計(jì)了1次諧波誤差的補(bǔ)償電路,通過實(shí)測(cè)數(shù)據(jù)并采用諧波分析法對(duì)兩項(xiàng)誤差進(jìn)行補(bǔ)償與調(diào)整,提高了感應(yīng)同步器的測(cè)角精度。文獻(xiàn)[2]針對(duì)感應(yīng)同步器測(cè)角系統(tǒng),提出了一種計(jì)算機(jī)自動(dòng)檢測(cè)測(cè)角誤差、辨識(shí)誤差模型系數(shù)和補(bǔ)償誤差的方法,其自動(dòng)化程度高、檢測(cè)數(shù)據(jù)殘差小、誤差補(bǔ)償充分,進(jìn)而提高了測(cè)角的精確度。文獻(xiàn)[3]在分析感應(yīng)同步器測(cè)角系統(tǒng)誤差特性的基礎(chǔ)上,提出先測(cè)補(bǔ)零位誤差引起的細(xì)分誤差成分,再處理剩余細(xì)分誤差的方式,給出了由棱體獲取全面、有效零位誤差的方法及應(yīng)用稀疏誤差數(shù)據(jù)補(bǔ)償?shù)木唧w過程。文獻(xiàn)[4]通過對(duì)感應(yīng)同步器測(cè)角誤差的實(shí)測(cè),提出了分離出長(zhǎng)周期的1次諧波誤差和短周期1次和2次諧波誤差的方法,并且采用相應(yīng)的軟件和硬件補(bǔ)償,極大提高了測(cè)角系統(tǒng)的精度。文獻(xiàn)[5]針對(duì)小范圍回轉(zhuǎn)軸系的圓感應(yīng)同步器測(cè)角系統(tǒng)誤差,建立了回歸模型,通過最小二乘法得到圓感應(yīng)同步器一個(gè)節(jié)距內(nèi)的1次和2次諧波誤差,采用硬件補(bǔ)償技術(shù)提高了測(cè)角系統(tǒng)精度。文獻(xiàn)[6]分析了圓感應(yīng)同步器測(cè)角系統(tǒng)的4個(gè)主要誤差源,即長(zhǎng)周期1次和2次諧波以及短周期1次和2次諧波,并且分析了誤差源在有限檢測(cè)樣本空間中的正交性,直接采用諧波分析法進(jìn)行誤差分離,極大簡(jiǎn)化了數(shù)據(jù)處理的方法。文獻(xiàn)[7]建立了更為完整的圓感應(yīng)同步器測(cè)角系統(tǒng)的誤差模型,即測(cè)角系統(tǒng)誤差項(xiàng)包括長(zhǎng)周期的1次到4次諧波和短周期的1次到4次諧波,針對(duì)這些誤差項(xiàng)設(shè)計(jì)了組合實(shí)驗(yàn)方法,并采用最小二乘法進(jìn)行誤差分離,通過軟件和硬件補(bǔ)償,進(jìn)一步提高了測(cè)角系統(tǒng)精度。文獻(xiàn)[8]結(jié)合雙通道測(cè)角系統(tǒng)的特點(diǎn),提出一種查表實(shí)現(xiàn)粗精耦合的方法,闡述了建立粗精相關(guān)表及查表得到絕對(duì)角度的過程。文獻(xiàn)[9]針對(duì)圓感應(yīng)同步器的高精度位置采樣伺服系統(tǒng),提出一種動(dòng)態(tài)補(bǔ)償方法,對(duì)圓感應(yīng)同步器數(shù)顯表的測(cè)量輸出進(jìn)行動(dòng)態(tài)補(bǔ)償,以減小由于數(shù)顯表測(cè)量頻率變化所帶來的采樣時(shí)刻位置誤差,從而提高系統(tǒng)的跟蹤精度。文獻(xiàn)[10]分析了圓感應(yīng)同步器系統(tǒng)誤差的產(chǎn)生機(jī)理,使用相關(guān)的實(shí)驗(yàn)裝置對(duì)圓感應(yīng)同步器的系統(tǒng)誤差進(jìn)行了動(dòng)態(tài)的定量測(cè)量,并結(jié)合數(shù)據(jù)處理和誤差機(jī)理,確立了圓感應(yīng)同步器的動(dòng)態(tài)誤差模型,根據(jù)誤差模型對(duì)圓感應(yīng)同步器的輸出信號(hào)進(jìn)行補(bǔ)償,提高了測(cè)角系統(tǒng)精度。文獻(xiàn)[11]研究了感應(yīng)同步器兩相的幅值和正交誤差,實(shí)現(xiàn)了幅值和正交誤差檢測(cè)的新方法,并用軟件進(jìn)行了修正。文獻(xiàn)[12]介紹了感應(yīng)同步器測(cè)角誤差的來源和分類。并對(duì)零位誤差和細(xì)分誤差進(jìn)行了詳細(xì)的分析和計(jì)算,通過實(shí)驗(yàn)驗(yàn)證了誤差計(jì)算的正確性。以上文獻(xiàn)均沒有對(duì)圓感應(yīng)同步器的扇區(qū)刻劃誤差進(jìn)行探究,本文對(duì)此誤差進(jìn)行研究,有助于測(cè)角系統(tǒng)精度的進(jìn)一步提高。在采用正23面棱體—自準(zhǔn)直儀檢定系統(tǒng)對(duì)圓感應(yīng)同步器測(cè)角系統(tǒng)進(jìn)行誤差檢定時(shí),發(fā)現(xiàn)有時(shí)存在較大的短周期4次諧波誤差,當(dāng)補(bǔ)償短周期4次諧波誤差后,改變測(cè)角系統(tǒng)的起測(cè)角位置時(shí),測(cè)試后發(fā)現(xiàn)仍舊存在較大的短周期4次諧波誤差。通過這種現(xiàn)象,必然會(huì)想到測(cè)角系統(tǒng)有新的誤差源沒有被探究出來,經(jīng)過分析與驗(yàn)證,認(rèn)為圓感應(yīng)同步器出現(xiàn)了扇區(qū)刻劃誤差。
1?測(cè)角系統(tǒng)的誤差模型
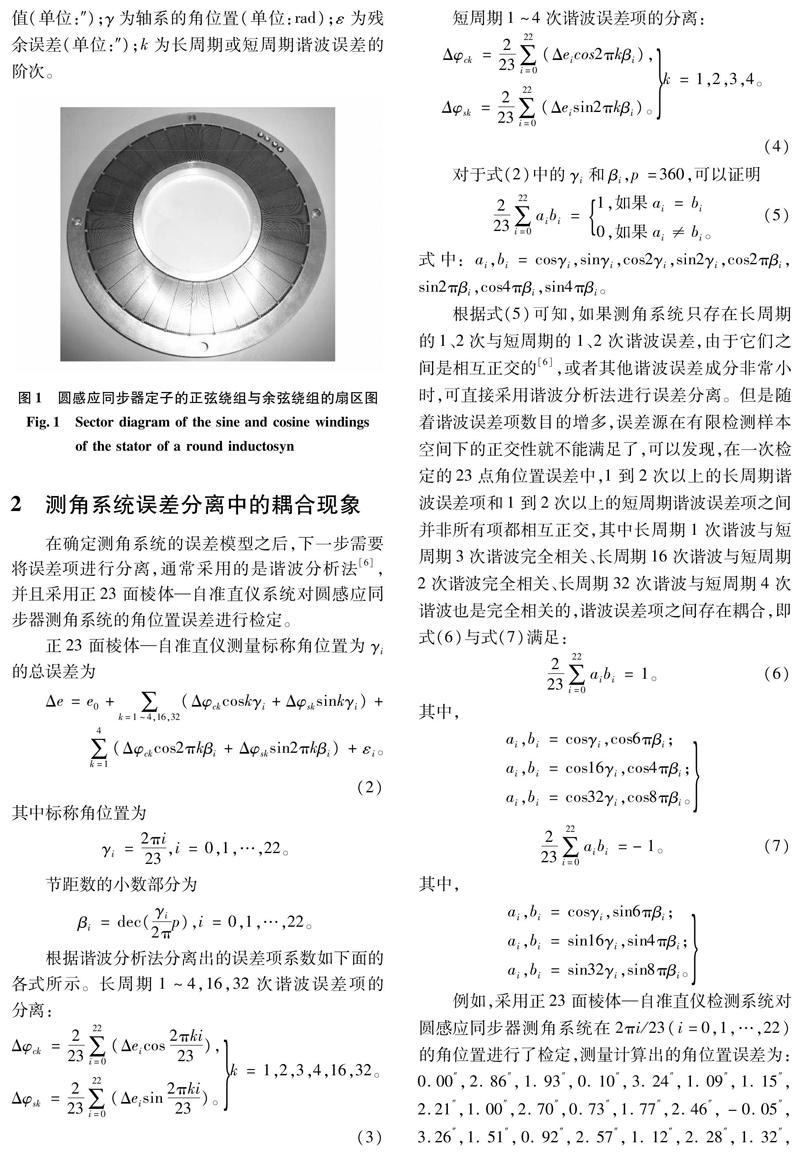
通過對(duì)高精度圓感應(yīng)同步器測(cè)角系統(tǒng)的誤差實(shí)測(cè)表明:精度優(yōu)于1的高精度測(cè)角系統(tǒng),誤差不僅要考慮1、2次短周期諧波誤差[1-4]和1、2次長(zhǎng)周期諧波誤差[6],還要考慮長(zhǎng)周期3、4次諧波誤差和短周期3、4次諧波誤差[7],短周期3、4次諧波由于激磁電源的波形失真引起。有時(shí)圓感應(yīng)同步器會(huì)出現(xiàn)扇區(qū)刻劃誤差,對(duì)于360對(duì)極圓感應(yīng)同步器,它共有32個(gè)扇區(qū),如圖1所示,包括16個(gè)正弦扇區(qū)和16個(gè)余弦扇區(qū),如果加工過程中各個(gè)扇區(qū)刻劃誤差一致,容易造成長(zhǎng)周期的16、32次諧波誤差,更為完整的誤差模型表示為表示為
2?測(cè)角系統(tǒng)誤差分離中的耦合現(xiàn)象
在確定測(cè)角系統(tǒng)的誤差模型之后,下一步需要將誤差項(xiàng)進(jìn)行分離,通常采用的是諧波分析法[6],并且采用正23面棱體—自準(zhǔn)直儀系統(tǒng)對(duì)圓感應(yīng)同步器測(cè)角系統(tǒng)的角位置誤差進(jìn)行檢定。
根據(jù)式(5)可知,如果測(cè)角系統(tǒng)只存在長(zhǎng)周期的1、2次與短周期的1、2次諧波誤差,由于它們之間是相互正交的[6],或者其他諧波誤差成分非常小時(shí),可直接采用諧波分析法進(jìn)行誤差分離。但是隨著諧波誤差項(xiàng)數(shù)目的增多,誤差源在有限檢測(cè)樣本空間下的正交性就不能滿足了,可以發(fā)現(xiàn),在一次檢定的23點(diǎn)角位置誤差中,1到2次以上的長(zhǎng)周期諧波誤差項(xiàng)和1到2次以上的短周期諧波誤差項(xiàng)之間并非所有項(xiàng)都相互正交,其中長(zhǎng)周期1次諧波與短周期3次諧波完全相關(guān)、長(zhǎng)周期16次諧波與短周期2次諧波完全相關(guān)、長(zhǎng)周期32次諧波與短周期4次諧波也是完全相關(guān)的,諧波誤差項(xiàng)之間存在耦合,即式(6)與式(7)滿足:
例如,采用正23面棱體—自準(zhǔn)直儀檢測(cè)系統(tǒng)對(duì)圓感應(yīng)同步器測(cè)角系統(tǒng)在2πi/23(i=0,1,…,22)的角位置進(jìn)行了檢定,測(cè)量計(jì)算出的角位置誤差為:0.00″,2.86″,1.93″,0.10″,3.24″,1.09″,1.15″,2.21″,1.00″,2.70″,0.73″,1.77″,2.46″,-0.05″,3.26″,1.51″,0.92″,2.57″,1.12″,2.28″,1.32″,1.57″,2.44″。
根據(jù)得到的角位置誤差數(shù)據(jù),按照式(3)和式(4)計(jì)算出的各個(gè)諧波誤差項(xiàng)的系數(shù)為
根據(jù)有限23點(diǎn)角位置誤差數(shù)據(jù)所計(jì)算得到諧波誤差項(xiàng)的結(jié)果驗(yàn)證了短周期2次諧波誤差和長(zhǎng)周期16次諧波誤差耦合;短周期3次諧波誤差和長(zhǎng)周期1次諧波誤差耦合;短周期4次諧波和長(zhǎng)周期32次諧波誤差耦合。其中,長(zhǎng)周期32次諧波、16次諧波分別與短周期4次諧波、2次諧波的耦合也是本文提出扇區(qū)誤差的原因。
扇區(qū)刻劃誤差可以理解為在扇區(qū)的刻蝕過程由刻蝕設(shè)備自身的誤差帶來的,刻蝕的扇區(qū)誤差具有一致性,所以表現(xiàn)為長(zhǎng)周期16次、32次諧波誤差,而短周期2次諧波誤差為圓感應(yīng)同步器的激磁電壓相位不正交、幅值不相等帶來的,短周期4次諧波誤差則是由于激磁電壓的波形失真度引起的。顯然,采用有限的23點(diǎn)角位置誤差來分離這些相互耦合的諧波誤差項(xiàng)是不可能的,下面考慮采用不同角位置作為起測(cè)點(diǎn)的組合實(shí)驗(yàn)方法來進(jìn)行誤差分離。
3?改進(jìn)后測(cè)角系統(tǒng)誤差分離的數(shù)據(jù)出理方法
將公式(3)由下式表示:
從式(8)中可以看出,一共需要辨識(shí)21個(gè)誤差系數(shù),采用的方法依舊是正23面棱體—自準(zhǔn)直儀檢測(cè)法。此外,若想分離長(zhǎng)周期的32次諧波與短周期的4次諧波,需要在測(cè)試數(shù)據(jù)中含有相應(yīng)的激勵(lì),長(zhǎng)周期32次諧波誤差項(xiàng)的周期為T=360/32=11.25,而正23面棱體每次所能檢定的最小角度間隔為360/23=15.652 2,不能激勵(lì)出長(zhǎng)周期32次諧波誤差項(xiàng),針對(duì)這個(gè)問題,設(shè)計(jì)了組合實(shí)驗(yàn)計(jì)劃,即采取不同的起測(cè)角度進(jìn)行組合測(cè)試,其中選取的若干起測(cè)角度在0°~11.25°的范圍之內(nèi)等間隔分布,其目的是為了更好地激勵(lì)出長(zhǎng)周期32次諧波誤差。本文選取了α0=0,α1=2.8125,α2=5.6250,α3=8.4375,α4=11.25作為起測(cè)角度來分離長(zhǎng)周期32次諧波誤差和短周期4次諧波誤差。是本文提出扇區(qū)誤差的原因。
由表1中扇區(qū)誤差辨識(shí)結(jié)果以及對(duì)扇區(qū)誤差項(xiàng)系數(shù)的不確定度分析可知,2種檢定方法所辨識(shí)出的長(zhǎng)周期16、32次諧波誤差項(xiàng)具有一致性,且比其它諧波誤差成分更為顯著,從而驗(yàn)證了扇區(qū)誤差的存在。
如圖2~圖6所示,經(jīng)過軟件補(bǔ)償后,正23面棱體—自準(zhǔn)直儀檢測(cè)系統(tǒng)測(cè)量測(cè)角系統(tǒng)以0°起測(cè)的補(bǔ)償前的角位置誤差范圍為-1.84″~0.44″,補(bǔ)償后的角位置誤差為0.31″~-0.39″,峰峰值從2.28″下降到0.70″;以2.8125°起測(cè)的補(bǔ)償前的角位置誤差范圍為0.47″~-2.64″,補(bǔ)償后的角位置誤差范圍為0.30″~-0.46″,峰峰值從3.11″下降到0.76″;以5.6250°起測(cè)的補(bǔ)償前的角位置誤差范圍為1.42″~-1.00″,補(bǔ)償后的角位置誤差范圍為0.34″~-0.52″,峰峰值從2.42″下降到0.86″;以8.4375°起測(cè)的補(bǔ)償前的角位置誤差范圍為2.52″~-0.50″,補(bǔ)償后的角位置誤差范圍為0.29″~-0.53″,峰峰值從3.02″下降到0.82″;以11.25°起測(cè)的補(bǔ)償前的角位置誤差范圍為1.71″~-0.71″,補(bǔ)償后的角位置誤差范圍0.43″~-0.58″,峰峰值從2.42″下降到1.01″。可以看到補(bǔ)償效果非常明顯。另一方面,391齒多齒分度臺(tái)—平面反射鏡—自準(zhǔn)直儀檢測(cè)系統(tǒng)測(cè)量測(cè)角系統(tǒng)補(bǔ)償前的角位置誤差范圍為0.80″~-2.72″,補(bǔ)償后的角位置誤差范圍為:0.50″~-0.65″,峰峰值從3.52″下降到1.15″。2種方法計(jì)算的扇區(qū)誤差系數(shù)具有一致性,補(bǔ)償后用2種測(cè)試方法檢定后的角位置誤差范圍基本一致,從實(shí)驗(yàn)驗(yàn)證了誤差分離方法的正確性。
5?結(jié)?論
1)32個(gè)扇區(qū)的圓感應(yīng)同步器測(cè)角系統(tǒng)容易產(chǎn)生長(zhǎng)周期的16次、32次諧波誤差。
2)在圓感應(yīng)同步器測(cè)角系統(tǒng)的誤差模型中引入扇區(qū)誤差,并分析了誤差源在有限檢測(cè)樣本空間的正交性和耦合性,發(fā)現(xiàn)了長(zhǎng)周期1次諧波與短周期3次諧波誤差項(xiàng)、長(zhǎng)周期16次諧波與短周期2次諧波誤差項(xiàng)、長(zhǎng)周期32次諧波與短周期4次諧波誤差項(xiàng)存在耦合現(xiàn)象,本文設(shè)計(jì)的不同起測(cè)點(diǎn)的組合實(shí)驗(yàn)計(jì)劃,有效地分離出了耦合的誤差項(xiàng)并辨識(shí)出了扇區(qū)刻劃誤差。
3)采用391齒多齒分度臺(tái)—平面反射鏡—自準(zhǔn)直儀檢測(cè)系統(tǒng)和正23面棱體—自準(zhǔn)直儀檢測(cè)系統(tǒng)分別測(cè)量測(cè)角系統(tǒng)補(bǔ)償后的角位置誤差,其測(cè)試結(jié)果的一致性驗(yàn)證了誤差分離方法的正確性,也驗(yàn)證了扇區(qū)誤差的存在,在補(bǔ)償扇區(qū)刻劃誤差后進(jìn)一步提高了測(cè)角系統(tǒng)的角位置精度。
參 考 文 獻(xiàn):
[1]?曾慶雙, 任順清, 王衛(wèi)陽(yáng). 感應(yīng)同步器測(cè)角系統(tǒng)誤差調(diào)整與補(bǔ)償[J]. 哈爾濱工業(yè)大學(xué)學(xué)報(bào),1998(1):87.
ZENG Qingshuang, REN Shunqing, WANG Weiyang. Error adjustment and compensation of inductosyn angle Measuring System[J]. Journal of Harbin Institute of Technology, 1998(1): 87.
[2]?陳希軍, 任順清. 感應(yīng)同步器測(cè)角誤差的自動(dòng)化檢測(cè)與補(bǔ)償[J]. 電機(jī)與控制學(xué)報(bào), 2010, 14(4):41.
CHEN Xijun, REN Shunqing. Automatic measurement and compensation of inductosyn angular displacement error[J]. Electric Machines and Control, 2010,14(4):41.
[3]?李海霞, 張嶸, 韓豐田. 感應(yīng)同步器測(cè)角系統(tǒng)誤差測(cè)試及補(bǔ)償[J]. 清華大學(xué)學(xué)報(bào)(自然科學(xué)版), 2016,56(6):611.
LI Haixia, ZHANG Rong, HAN Fengtian. Error testing and compensation of an inductosynbased angular measurement system[J].J Tsinghua Univ: Sci and Tech, 2016,56(6):611.
[4]?任順清, 曾慶雙, 陳希軍. 圓感應(yīng)同步器測(cè)角誤差的分離技術(shù)[J]. 中國(guó)電機(jī)工程學(xué)報(bào), 2001, 21(4):92.
REN Shunqing,ZENG Qingshuang,CHEN Xijun. The anglemeasuing error separation technology of round inductosyn[J]. Proceedings of The Chinese Society for Electrical Engineering, 2001, 21(4):92.
[5]?任順清, 伊國(guó)興, 曾慶雙,等. 小范圍回轉(zhuǎn)軸系感應(yīng)同步器測(cè)角系統(tǒng)的誤差分離技術(shù)[J]. 電機(jī)與控制學(xué)報(bào), 2005, 9(2):183.
REN Shunqing, YI Guoxing, ZENG Qingshuang,et al. Error separating technology of inductosyn anglemeasuring system in limiting rotation axis system[J]. Electric Machines and Control, 2005, 9(2):183.
[6]?REN S Q, ZENG Q H, WANG C H.Orthogonality of inductosyn anglemeasuring system error and errorseparating technology[J]. Journal of Harbin Institute of Technology,2003,10(4):376.
[7]?REN S Q, CHEN X J.The integrated error model and error checking & separating technology for round inductosyn anglemeasuring system[C].ISIST,Harbin,2004:252.
[8]?李海霞, 張嶸, 韓豐田,等.查表實(shí)現(xiàn)雙通道測(cè)角系統(tǒng)的粗精耦合[J]. 清華大學(xué)學(xué)報(bào)(自然科學(xué)版), 2014,54(11):1481.
LI Haixia, ZHANG Rong, HAN Fengtian,et al. Lookuptable method for coarsefine data coupling for a doublechannel angle measurement system[J]. J Tsinghua Univ: Sci and Tech, 2014,54(11):1481.
[9]?劉強(qiáng), 爾聯(lián)潔, 陳敬泉,等. 基于線性外推原理的圓感應(yīng)同步器輸出動(dòng)態(tài)補(bǔ)償[J]. 儀器儀表學(xué)報(bào), 2004, 25(1):106.
LIU Qiang,ER Lianjie,CHEN Jingquan, et al. Dynamic Compensation of Inductosyn Output Based on Linear Extrapolation Scheme[J].Chinese Journal of Scientific Instrument, 2004, 25(1):106.
[10]?袁輝, 劉朝暉, 李治國(guó),等. 圓感應(yīng)同步器系統(tǒng)誤差的動(dòng)態(tài)提取與補(bǔ)償[J]. 光學(xué)精密工程, 2015, 23(3):794.
YUAN Hui, LIU Chaohui, LI Zhiguo, et,al. Dynamic extracting and compensation of system error for rotary inductosyn[J].Optics and Precision Engineering, 2015, 23(3):794.
[11]?WANG X Q,WU M, ZHU G, et al. Research and simulation of amplitude error and quadrature error for inductonsyn[C].2010 2nd International Asia Conference on Informatics in Control, Automation and Robotics.Wuhan,2010,2:354-357.
[12]?ZOU A,ZHAO H, MA Y H, et al. Analysis calculation and testing of rotary inductosyn angle measuring errors [C].2014 33rd ?Chinese Control Conference. Nanjing, 2014:8091-8096.
(編輯:姜其鋒)
