基于Arduino平臺的四軸飛行器設計
2019-09-10 07:22:44吳振磊王軒楊輝
甘肅科技縱橫 2019年7期
吳振磊 王軒 楊輝
摘要:科技改變了人們的生活,近些年來,伴隨著微電子技術、微機械控制技術、大型集成電路技術的發展,四軸飛行器在人們的學習、生活、工作中得到了廣泛的應用,前景非常可觀,因此得到了人們廣泛的關注。本文介紹了一種以Arduino平臺為核心的四軸飛行器的實現方案,詳細闡述了系統的總體構造、硬件電路設計和關鍵技術步驟。經測試后所得結果表明該飛行器系統可靠度強,應用成本低,可擴展性高,同時對后續設計有一定的借鑒意義。
關鍵詞:四軸飛行器;Arduino平臺;ATMEGA328P芯片;
中圖分類號: V278????? 文獻標志碼:A
1?? 引言
四軸飛行器最早是為了滿足軍事用途而被研發出的新式飛行器,隨著科技的進步,處理器、傳感器、電動機、單片機、鋰鐵電池等技術日益成熟,四軸飛行器在民用領域得到了飛速的發展和普及。目前,四軸飛行器已經在各個領域得到廣泛應用,如制作廣告所需的航拍、農藥噴灑、森林火災巡查、高壓電網檢查、益智玩具、災害搜救和軍事打擊等。近年來,許多學者、科研機構以及DIY愛好者通過對四軸飛行器進行分析,建立了系統的研究體系,具有廣闊的前景。
現如今,人們普遍應用的飛行器有固定翼飛機和直升機,相比于固定翼飛機,四軸飛行器的機動性能較好,能夠做到懸停、平行旋轉、垂直起降等固定翼飛機無法完成的動作,然而同時也帶來了續航時間短、飛行速度慢的缺點。而與普通直升機相比,四軸飛行器飛行狀態靈活且無須尾漿,因此結構簡單,成本較低。
2?? 基本控制原理
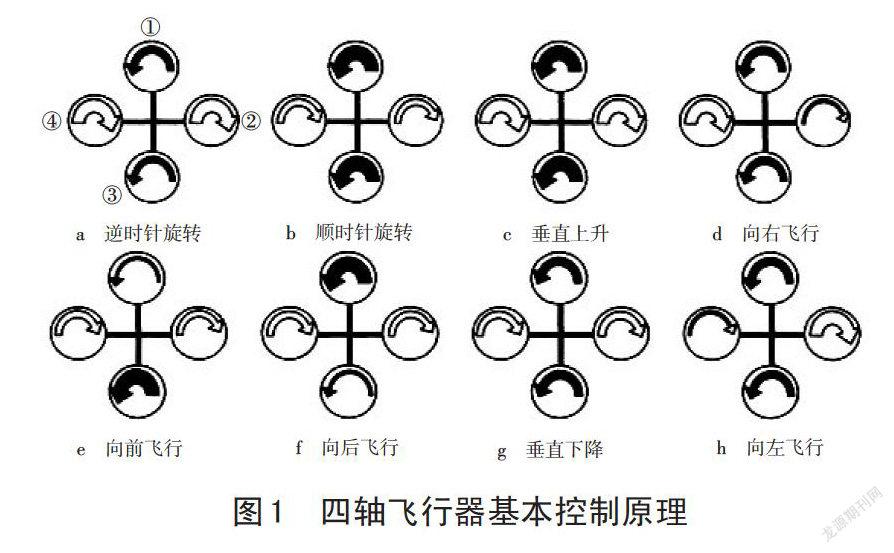
在四軸飛行器中,四個螺旋槳共同旋轉形成一個平面,靠飛控系統來控制每一個電機的動力輸出,以此來控制這個平面的傾斜程度,依靠升力的分力來對飛行方向進行調整。眾所周知,螺旋槳在旋轉時,會對機身做反扭力,因此四軸飛行器的螺旋槳的旋轉方向并不是相同的,而是相鄰的兩個螺旋槳旋轉方向相反,相對的兩個螺旋槳旋轉方向相同,如此一來就可以克服機身整體的反扭力,使四軸飛行器保持穩定的狀態。假如要完成上升或下降動作,則只需增加或減小螺旋槳的轉速;假如要完成水平方向移動的動作,則只需加大相反方向螺旋槳的轉速;假如要完成水平方向轉動的動作,只需要讓相對兩個同向的螺旋槳加速,其余兩個螺旋槳減速,改變反扭力的平衡狀態,但保持飛行器的總升力保持不變,就可以實現水平轉動的動作了。具體控制方法如圖1所示:
?例如圖f所示,在我們增大1號電機的轉速的同時減小3號電機的轉速,飛行器將會向后飛行。而如圖c和g所示,當我們同時增大(或減小)四個電機的相同轉速時,四軸飛行器將會垂直上升(或下降);當螺旋槳的旋轉所產生的升力與四軸飛行器自身的重力相同時,飛行器將會處于懸停的狀態。通過控制四個電機的轉速可以改變螺旋槳的升力,從而改變四軸飛行器的平衡狀態,以此來實現對四軸飛行器飛行姿態的控制。
3? 單元電路原理及結構
3.1 主控模塊
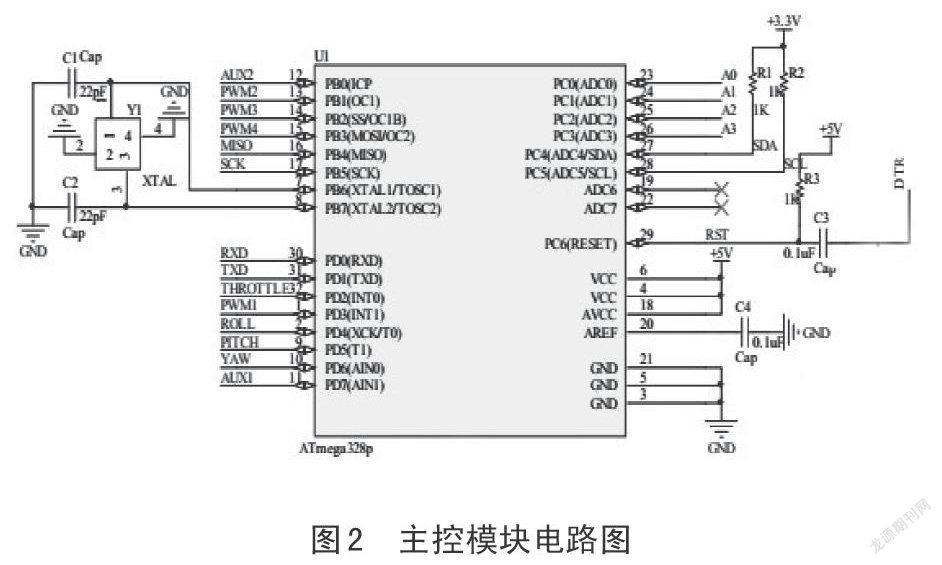
本四軸飛行器的控制算法是基于Arduino平臺開發實現的。在選擇系統方面,我們選用了Arduino Uno R3作為該四軸飛行器的主控制平臺,這個平臺的核心處理器為ATMEGA328P,該處理器擁有14路數字數據輸入/輸出口,其中六路是作為PWM輸出,其余的分別為1C、串口和SPI通信接口和十位內置A/D,可以滿足系統設計的需求,主控模塊如圖2所示。
3.2 姿態檢測模塊
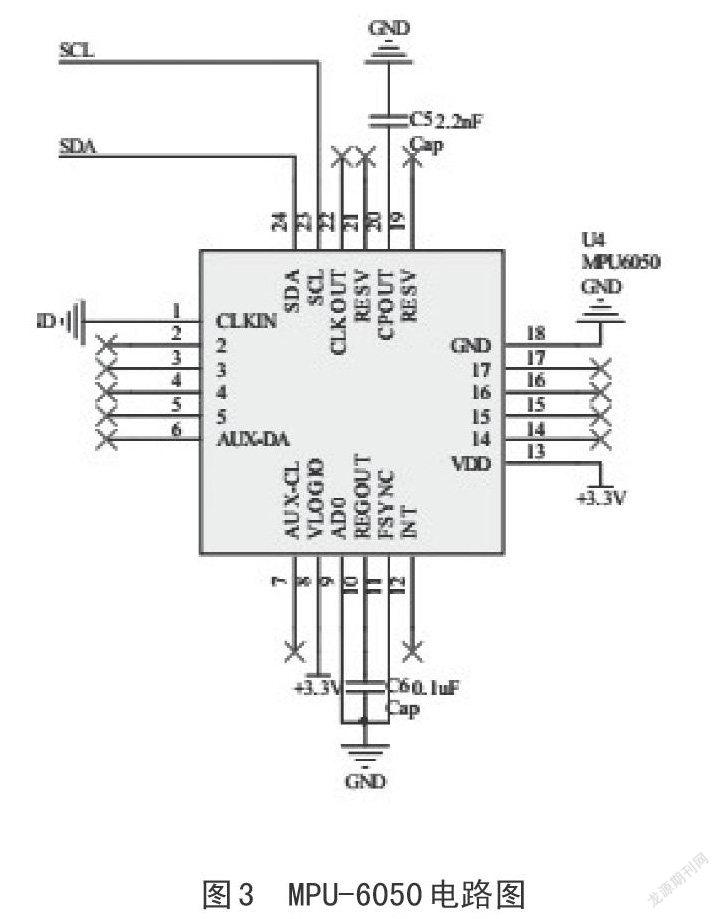
為了獲取四軸飛行器的運動姿態,我們選擇了MPU-6050來作為四軸飛行器的姿態檢測裝置,以此檢測四軸飛行器的線性加速度和角速率的變化。MPU-6050是全世界第一個六軸的運動處理傳感器,它將一個數字運動處理器、一個三軸MEMS陀螺、一個三軸MEMS加速度計三個裝置整合為一體,大大減小了四軸飛行器的重量,降低了飛行難度,簡化了制作流程。其中,DMP還兼具硬件濾波器的功能,因此通過編寫程序我們可以得到更穩定的飛行器的飛行姿態數據,可以大大提高四軸飛行器的飛行穩定性,MPU6050電路如圖3所示。
3.3 電機及驅動模塊
為了應對四軸飛行器的電機長時間高速旋轉的情況,我們選用了使用無刷直流電機,無刷直流電機的優點就是可以使用數字變頻控制技術對電機進行控制并且具有更大的可以調節從一到一萬每秒的轉速范圍,結構簡單、噪音較小、維護方便并且成本低廉,這里我們選用了720空心杯電機,已經足以滿足我們的需求。用來驅動無刷直流電機的驅動裝置是無刷直流電調,它可以根據控制信號(PWM波的占空比)的變化根據實際需求來調節電機的轉速。用來驅動四軸飛行器的電源我們選用了輸出電壓為3.7V,容量為600mAh的鋰鐵電池,用來驅動小型的四軸飛行器已經足夠滿足需求并且方便攜帶。
該四軸飛行器的電路板上還可搭載電池管理芯片和驅動電機用的MOS管,使得搭建工作會更加簡便。
4?? 姿態數據處理及控制
4.1 濾波處理
飛行器的姿態數據處理能力將會直接影響飛行器的控制精度,好的姿態數據效果可以大大改善飛行器的飛行質量,為了對不穩定且噪音較大的姿態數據進行濾波處理,采用了硬件和軟件相結合方法。硬件濾波方面直接使用了MPU-6050傳感器上自帶的數字運動處理器,它能夠接收處理源于加速度計、陀螺儀的數據,處理的結果能夠從DMP寄存器里讀出,并且比一般陀螺儀和加速度計讀取的數據更穩定,還減小了飛行過程中所產生的噪聲。
4.2 姿態控制算法
經過軟件、硬件濾波處理后的姿態數據,數據質量與信噪比相比之前有了明顯的改善,方便我們更精確地控制四軸飛行器的姿態。該系統的控制算法采用了PID控制。PID控制器是一種線性結構的控制器。它是由被控制的期望值和實際的輸出值形成一個控制偏差,而后將產生的偏差按比例(P),積分(I),微分(D)的關系,使用線性組合方式構成合適的控制量去控制被控制的對象。
5?? 結束語
本設計采用了Arduino平臺作為飛行器主控平臺,采用ATMEG芯片作為主控芯片,利用PID算法可以較容易實現對飛行器姿態檢測及動作的控制。同時,該平臺具有較好的可擴展性,可以滿足物聯網技術的需求,通過在平臺上搭載各種通信模塊,如:紅外、藍牙、WiFi、Zigbee等,實現飛行器與其他智能控制終端的連接,滿足遠程控制的要求,市場應用前景廣闊。
參考文獻:
[1]王瑞,劉莉蘋.基于STC15的四軸飛行器設計[J].現代制造技術與裝備.2017.12;
[2]趙鑫川,王利利.基于STM32F407的四軸飛行器的設計[J].內江科技.2018.5;
[3]盛希寧,蔡舒旻.四軸飛行器的系統設計[J] .林業機械與土木設備.2018.4;
[4]陳國定.基于MPU6050的四軸硬件姿態解算研究[J].機電工程.2018.1;
[5]張崇暉.基于Arduino平臺的微小型四軸飛行器設計與飛行控制系統實現[J].南通航運職業技術學院學報.2017.3;
作者簡介:吳振磊(1981-),男,江蘇蘇州人,碩士,講師,研究方向:電子信息工程技術。
基金項目:蘇州經貿職業技術學院院級大創項目:《基于Arduino平臺的四軸飛行器開發與設計》
