無人機建模與仿真技術
2019-09-10 07:22:44呂曉林
無人機 2019年3期
呂曉林



無人機在地空武器系統(tǒng)的模擬演練和兵力推演過程中,扮演中重要的角色,在現(xiàn)代戰(zhàn)爭發(fā)揮著越來越重要的作用。通過建立無人機運動學和動力學模型,分析了歐拉法及改進歐拉法、龍格——庫塔法(四階)、Admas預報—校正方法等數(shù)值解算方法和它們的優(yōu)缺點,研究了數(shù)字仿真、半實物仿真和物理仿真工作原理、系統(tǒng)組成和實現(xiàn)方法,對無人機建模和仿真進行了系統(tǒng)闡述,具有—定的借鑒意義和推廣應用價值。
在地空武器系統(tǒng)地面模擬演練過程中,無人機扮演著藍軍的角色;在事關戰(zhàn)爭勝負的兵力推演中,無人機充當了空中來襲敵方,無人機能否逼真地模擬敵方,其建模與仿真是關鍵,因此有必要對無人機系統(tǒng)建模和仿真進行系統(tǒng)闡述。
無人機建模
無人機的運動學和動力學模型
常規(guī)氣動外形的無人機運動學和動力學數(shù)學模型是十二階非線性微分方程組(T-T體系)。當存在定值風擾動W時,此時無人機的地速V與空速U有以下的關系,即V=U+W,假設V、U、W在T-T體系中的各自的分量分別為:
四階龍格——庫塔公式是在離線仿真中最常用的微分方程算法,考慮到現(xiàn)在CPU性能大幅度的提高,也可應用在實時仿真中。
無人機仿真技術
數(shù)字仿真
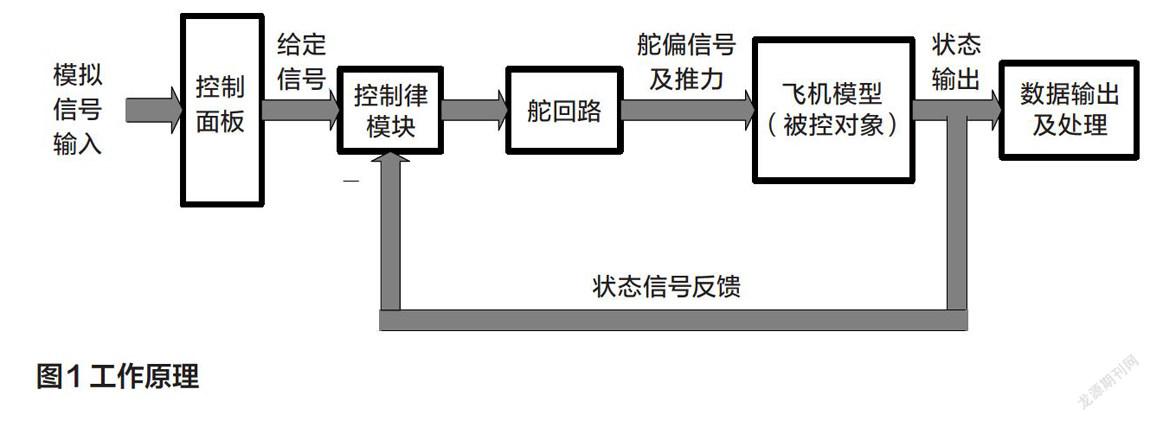
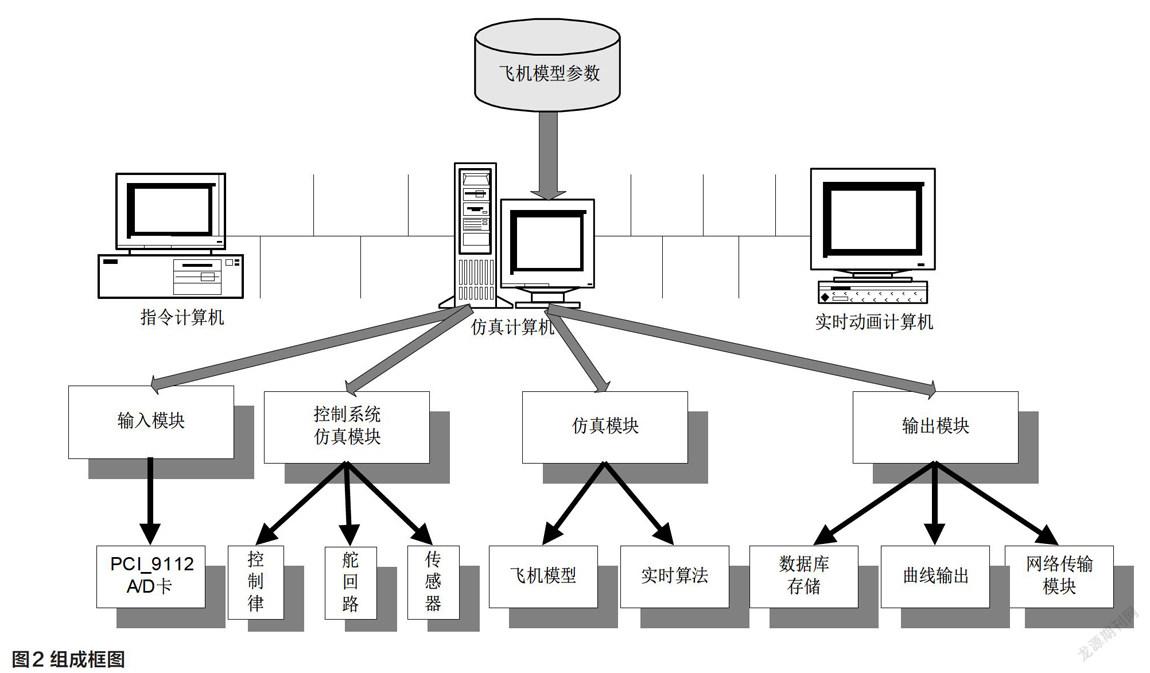
數(shù)字仿真主要是通過建立無人機系統(tǒng)數(shù)學模型,通過仿真計算機實時解算來對無人機飛行軌跡和三軸姿態(tài)、速度、高度等飛行參數(shù)進行仿真,模擬無人機真實的飛行狀況。其工作原理和組成見圖1。
半實物仿真
(1)半實物仿真原理和組成
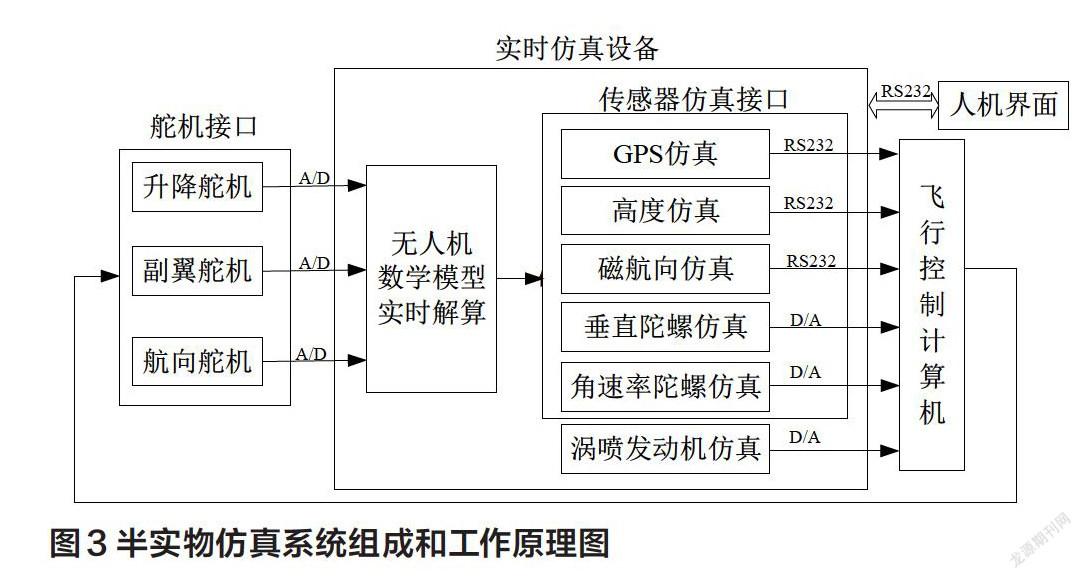
半實物仿真系統(tǒng)由實物(飛控計算機和舵機)和仿真平臺(無人機模型、傳感器仿真模塊)組成。在仿真過程中,飛控計算機主要進行控制律計算、接收遙控指令、控制舵機和發(fā)動機做出相應的響應,仿真計算機采集這些響應并進行無人機動力學解算,將解算出的數(shù)據傳輸?shù)絺鞲衅鞣抡婺K,飛控計算機根據傳感器仿真模塊提供的信息,解算出控制參數(shù)控制飛機穩(wěn)定飛行,同時將飛行參數(shù)下傳進行顯示和存貯,從而構成完整的閉環(huán)飛行系統(tǒng)。仿真系統(tǒng)組成和工作原理見圖3所示。
(2)半實物仿真實現(xiàn)
常規(guī)仿真
仿真系統(tǒng)主要由仿真軟件和仿真硬件組成。硬件主要由仿真計算機、接口卡(串口、D/A、ND卡齟成。軟件由無人機運動學和動力學模型解算軟件、傳感器仿真軟件、人機交互界面等組成。仿真計算機主要用于對無人機模型解算、接口通信及仿真結果的可視化處理、顯示和存儲等,GPS、高度、垂直陀螺、角速度等數(shù)據可以通過實時解算靶機的動力學和運動學模型而得到,磁航向的仿真數(shù)據可以通過將飛機航向根據解算相關公式和無人機機姿態(tài)修正而得到。顯示界面如圖4所示。
基于Matlab/Simulink仿真
MATLAB可以方便地通過Simulink對無人機運動進行建模和數(shù)字仿真。在MATLAB環(huán)境下利用其實時工具箱RTW,通過目標鏈接的方式和Simulink聯(lián)系在一起,通過單獨的實時內核方式驅動外部硬件設備,完成系統(tǒng)實時控制。xPC半實物仿真目標是MathWorks公司提供和發(fā)行的一個基于MATLAB/Real-Time Workshop體系框架的輔助產品,可以將PC計算機轉變?yōu)橐粋€實時系統(tǒng),支持許多類型的UO設備,提供S-function作為Simulink功能模塊的擴展。xPC目標采用宿主機一目標機的技術途徑,其中宿主機擁有運行MATLAB/Simulink,用Simulink模塊圖來創(chuàng)建模型經進行非實時的仿真,用RTW代碼生成器和C編譯器來生成可執(zhí)行代碼;目標機執(zhí)行所生成的代碼,通過以太網或串口連接實現(xiàn)宿主機和目標機之間的通信。系統(tǒng)原理如5圖,仿真過程如圖6所示。
宿主機安裝了VC++和MATLAB系列軟件,用于系統(tǒng)分析、數(shù)字仿真和實時仿真時的數(shù)據采集與監(jiān)測;目標機安裝了用于實時仿真的xPC內核。宿主機和目標機之間按照TCP/IP協(xié)議通過以太網連接。目標機和飛控計算機之間的GPS、高度和航向等信息用串口通信,陀螺和角速率信息用D/A卡通信;目標機和舵機之間為ND卡通信。
物理仿真
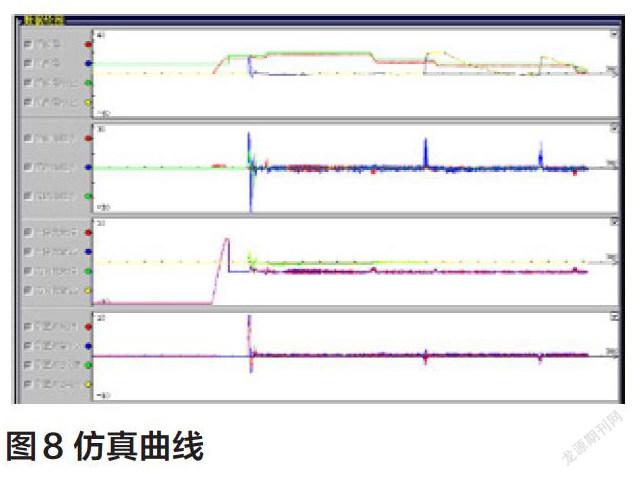
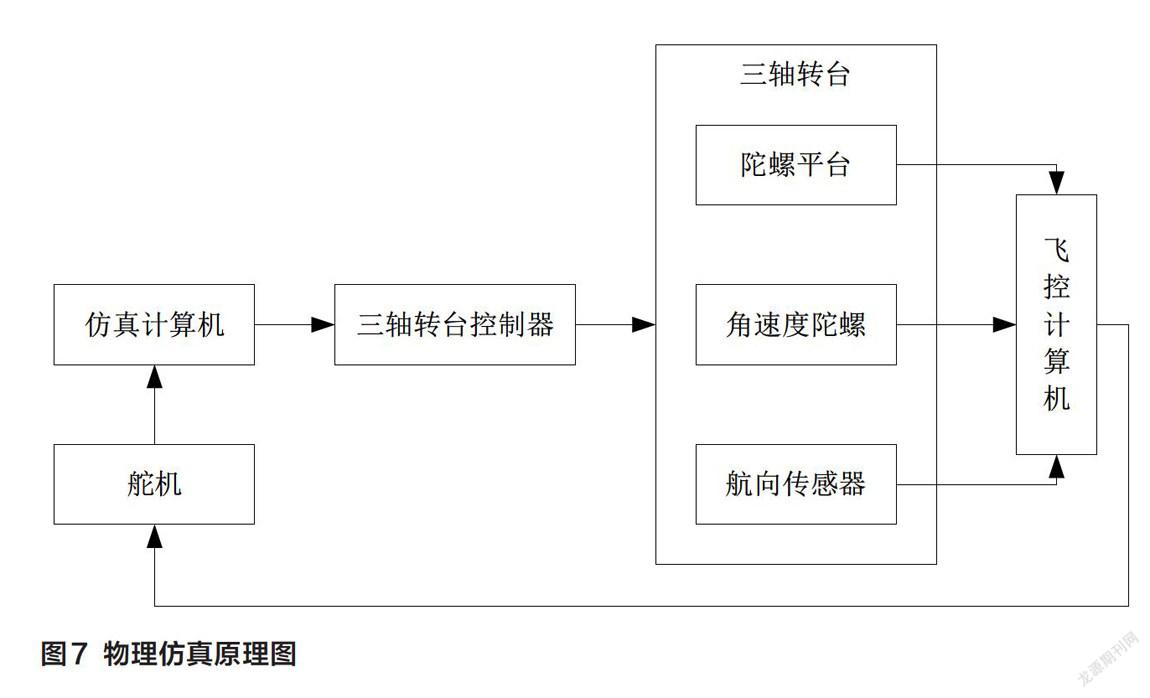
將陀螺平臺、角速度陀螺和航向傳感器安裝在三軸轉臺上,仿真計算機通過解算輸出信號控制三軸轉臺按照無人機的飛行姿態(tài)進行三軸轉動,同時陀螺平臺、角速度陀螺和航向傳感器輸出信號到飛控計算機,飛控計算機將控制信號反饋給仿真計算機完成閉環(huán)控制。仿真原理見圖7,仿真曲線見圖8。
結束語
通過建立無人機運動學和動力學模型,分析了十二階微分方程的數(shù)值解算方法,研究了數(shù)字仿真、半實物仿真和物理仿真工作原理和實現(xiàn)方法,系統(tǒng)闡述了無人機模型數(shù)字解算和仿真方法,對無人機仿真具有一定的推廣應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
