非結構環境需求下的液壓四足機器人設計
2019-10-16 01:32:58路可欣秦建軍
重慶理工大學學報(自然科學) 2019年9期
路可欣,秦建軍
(北京建筑大學 a.機電與車輛工程學院;b.城市軌道交通車輛服役性能保障北京市重點實驗室,北京 100044)
在產品設計初期,對繁多冗雜的需求進行系統性分析[1-3]已成為贏得市場、提高企業核心競爭力的關鍵所在,系統性分析也成為國內外學者的研究重點。Zaim等[4]將分析網絡過程與模糊邏輯法相耦合,提高了需求響應速度。劉普寅等[5]基于加權Euclid距離的模糊聚類方法,使需求聚類質量得以改善。為突破多粒度語言環境下的需求模糊性與不確定性問題,He等[6]改進傳統卡諾模型,提升了識別需求的精準度。為進一步提高需求向產品設計轉換的科學性,Wang等[7]基于樸素貝葉斯分類器的需求分類法,使產品設計更加科學可靠。
液壓四足機器人因其功率密度比大、驅動力大與環境適應能力強等特點,作為野外環境下的特種機器人得到了國內外學者的普遍關注,其主要作業場地多以非結構化地形為主,故本文以該環境特征為例進行分析,最終結合不同環境需求,實現對液壓四足機器人的設計。為避免機器人在野外非結構環境下導致的復雜需求聚集問題,Chu等[8]定義了擬合系數,利用區間模糊數算法建立權重等級隸屬度函數,確保了需求客觀標準與主觀語言的一致性。在提高機器人性能方面,韓國工業技術研究院的P2機器人[9]采用液壓馬達帶動關節旋轉,消除了直線運動轉化為轉動時的非線性,使控制更加簡單。中國上海交通大學的四足機器人[10]通過混連式腿部結構,將全部的驅動液壓缸集中在軀干,減輕了腿部負荷,提高了控制精度。在解決高動態下的機器人行走問題方面,MIT的Cheetah機器人[11]采用阻抗控制和虛擬模型相結合的控制框架,提高了行進速度。美國麻省理工大學的獵豹機器人[12]采用腿部關節與脊柱關節的仿貓科類構型,結構更合理精細,進一步解決了機體的輕量化問題。
由此可以看出,面對非結構環境需求下的液壓四足機器人設計問題,大多數學者分別從環境需求分析與提高機器人性能兩方面單獨進行研究,從不同角度對液壓四足機器人進行設計。由于液壓四足機器人不同于普通的產品,在整個設計過程中要考慮環境需求這一重要約束條件,對復雜需求進行分析及聚類,進而從多個方面共同考慮,實現對機器人的設計。為此,本文提出了模糊非解耦模型與FPBS耦合的設計方法,通過建立模糊非解耦矩陣對需求進行層次劃分,以獲取需求的精準聚類,同時基于功能-原理-行為-結構模型,實現設計層級的迭代,滿足產品系統化以及自頂至下多層級的設計要求,使最終方案得到需求的快速響應。
1 非結構環境對機器人的影響
移動機器人主要分為輪式、履帶式和足式3類,其特點各不相同,如表1所示。在野外環境中,遍布著崎嶇不平的山丘、叢林以及溝壑等,這些復雜環境使輪式和履帶式機器人無法正常運行,而足式機器人因其較強的環境適應能力而被廣泛應用。
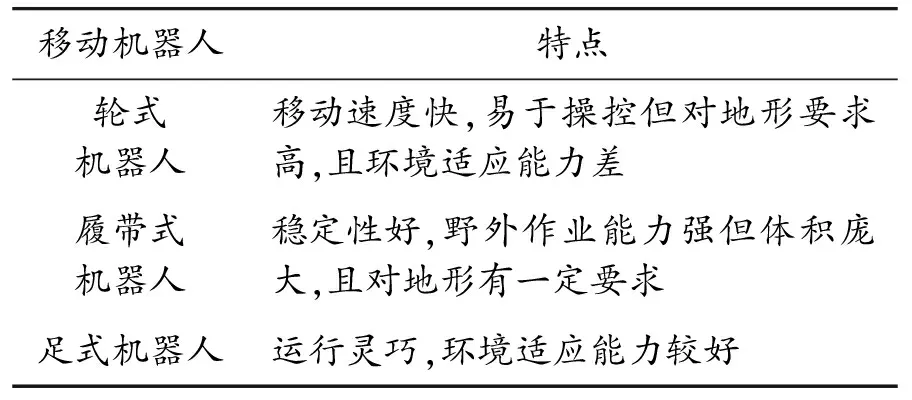
表1 移動機器人特點
國內外學者研發的四足機器人因其運行的環境需求不同而具備不同的結構,從而特點也不盡相同,如表2所示。在野外非結構環境下,地形的差異會對機器人帶來諸多影響,具體如表3所示。
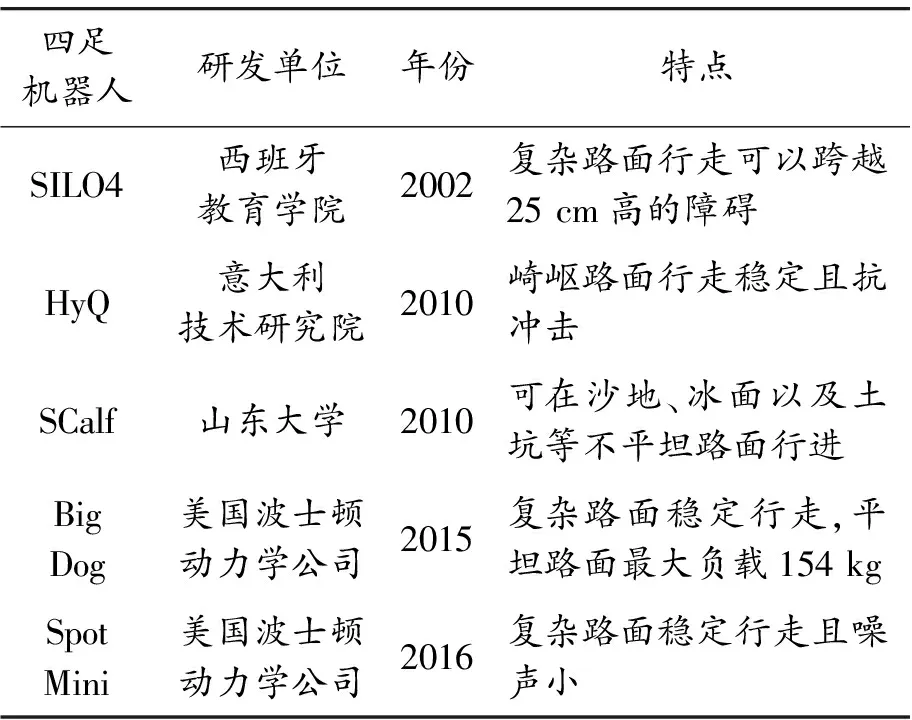
表2 國內外四足機器人及其特點
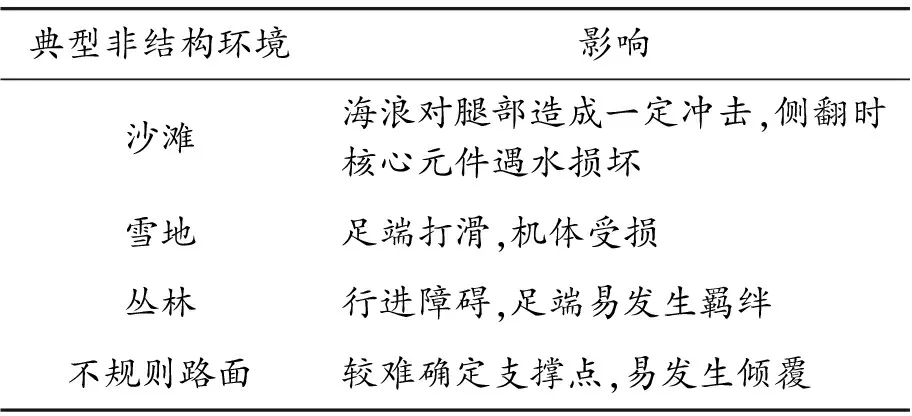
表3 典型非結構環境對機器人的影響
2 非結構環境下的需求聚類
2.1 產品質量屋
產品質量屋(house of quality,HoQ)是將用戶需求與產品工程特性、過程控制以及生產運營等多方面聯系在一起的矩陣[13],也是質量功能展開(quality function development,QFD)的重要工具。產品質量屋如圖1所示,天花板為產品所有工程特性,由用戶需求轉換而來;左墻為用戶需求及重要度所構成的輸入矩陣;右墻依次為競爭企業參數、用戶滿意度、目標、水平提高度、銷售點、絕對權重及相對權重;屋頂表示產品各項工程特性間的關聯關系;房間為用戶需求與工程特性間的關系矩陣;地板由分解得出的功能權重構成質量屋輸出矩陣。
由QFD團隊專家根據市場調研等方式確定產品質量屋中用戶需求及其重要度,利用層次分析法(analytic hierarchy process,AHP)確定m項用戶需求重要度,其定義式為
(1)

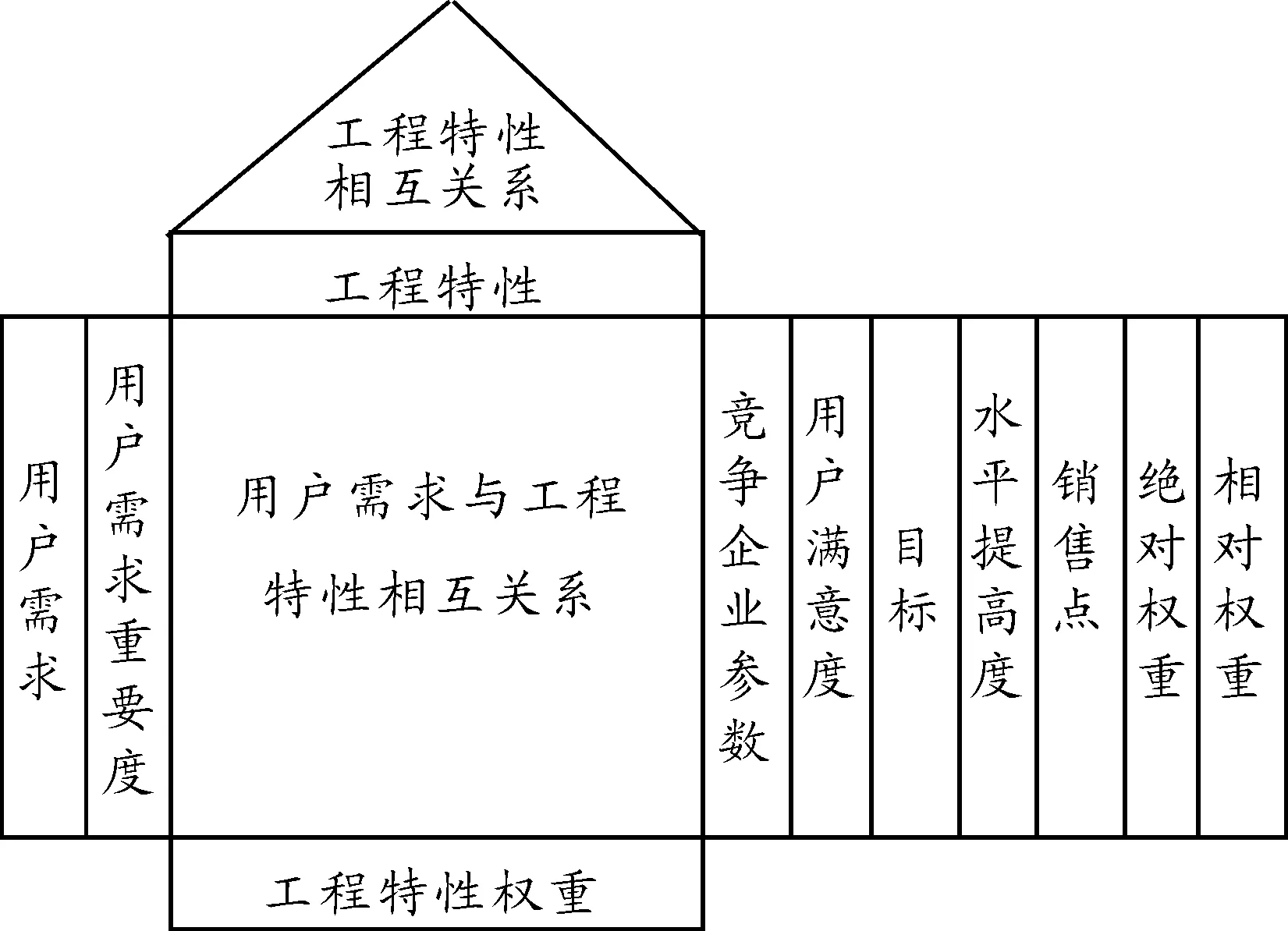
圖1 產品質量屋
重要度轉化方法分為比例分配法與獨立配點法,其中比例分配法為用戶需求的數目與分布會影響工程特性重要度的結果,而獨立配點法可以改進評價差異,故采用獨立配點法將重要度轉換為工程特性重要度,其定義式為
(2)

將用戶需求轉化為工程特性,得到工程特性重要度。將所得到的工程特性權重用于多目標優化設計中的加權系數,進一步對產品優化,充分反映用戶需求。
2.2 模糊非解耦模型
用戶需求聚類分析是產品設計初期關鍵的一步,為了科學地將用戶需求進行層次劃分,采用模糊非解耦模型,具體步驟如下:
步驟1 用戶需求信息標準化。將獲取的用戶需求分為階梯型與平等型兩種。階梯型為用戶需求屬性,具有差異性,例如質量、效率等。平等型為用戶需求相互平等、獨立且無差異性,將階梯型用戶信息聚集在系統前部,平等型用戶信息聚集在系統后部,為將信息標準化,可建立信息標準化數學模型。
(3)
式中:i=1,2,…,m;γ′為信息原始數值;γ為信息標準化后數值。
步驟2構建模糊相似矩陣。將信息系統前部階梯型的均值轉化為平等型屬性值,其定義式為
(4)
式中:k=l+1,l+2,…,n;dk為第k個屬性的屬性種類。
根據轉化后的平等型屬性值,將不同的平等型屬性進行聚類,其定義式為
(5)
式中:tk為平等型屬性,k=l+1,l+2,…,n。
用戶對象集合γ={γ1,γ2,…,γm}中γi與γj的模糊相似度的定義式為
(6)

(7)
該矩陣滿足自反性,即?i=j,lij=1;同時滿足對稱性,即lij=lji,均代表γi=γj的模糊相似度。

(8)
步驟4構建截矩陣Λmatα=(αij)
(9)
式中i,j=1,2,…,n,α為等價閉包矩陣t(Λmat)中的元素。可通過α的不同取值得到不同的動態聚類,由QFD團隊專家進行評估,選擇最優聚類方案。
1)非耦合矩陣,保證需求間相互獨立,即其中某一需求發生變化不會影響其他需求,故選取非耦合矩陣。
2)準耦合矩陣,其中某一需求按照一定順序變化,保證另一需求的獨立性。
3)耦合矩陣,其他類型的矩陣統稱為耦合矩陣,不能保證需求間的獨立性。
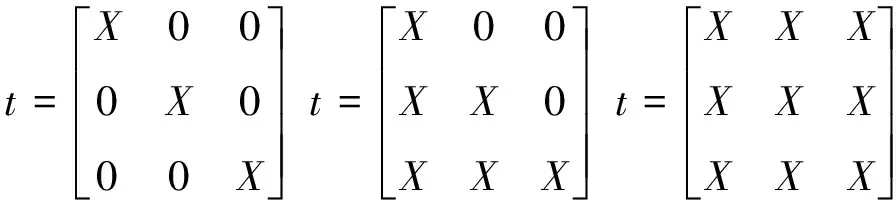
(a)非耦合矩陣 (b)準耦合矩陣 (c)耦合矩陣
2.3 基于模糊非解耦模型的需求聚類

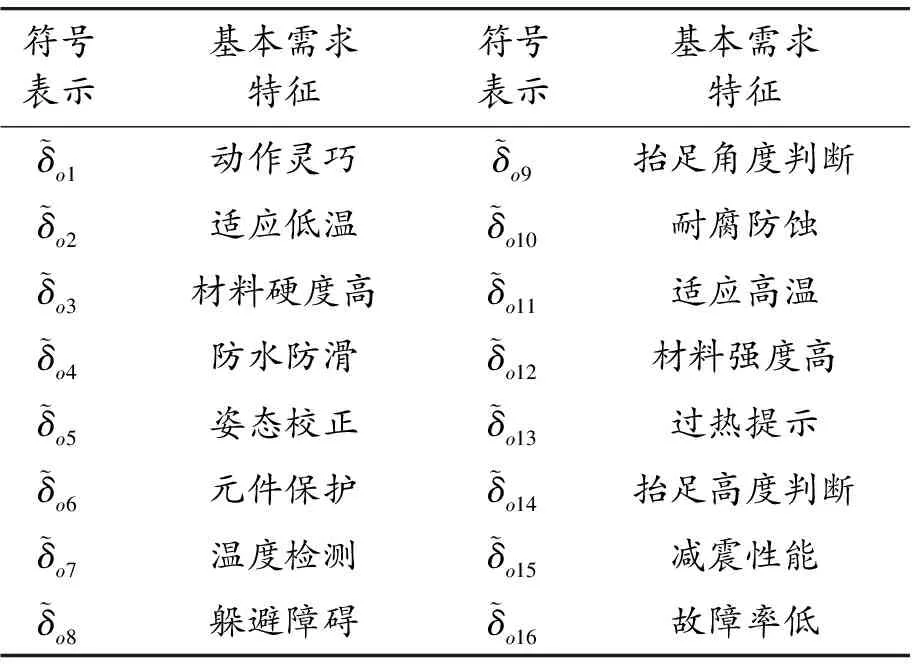
表5 液壓四足機器人基本需求特征
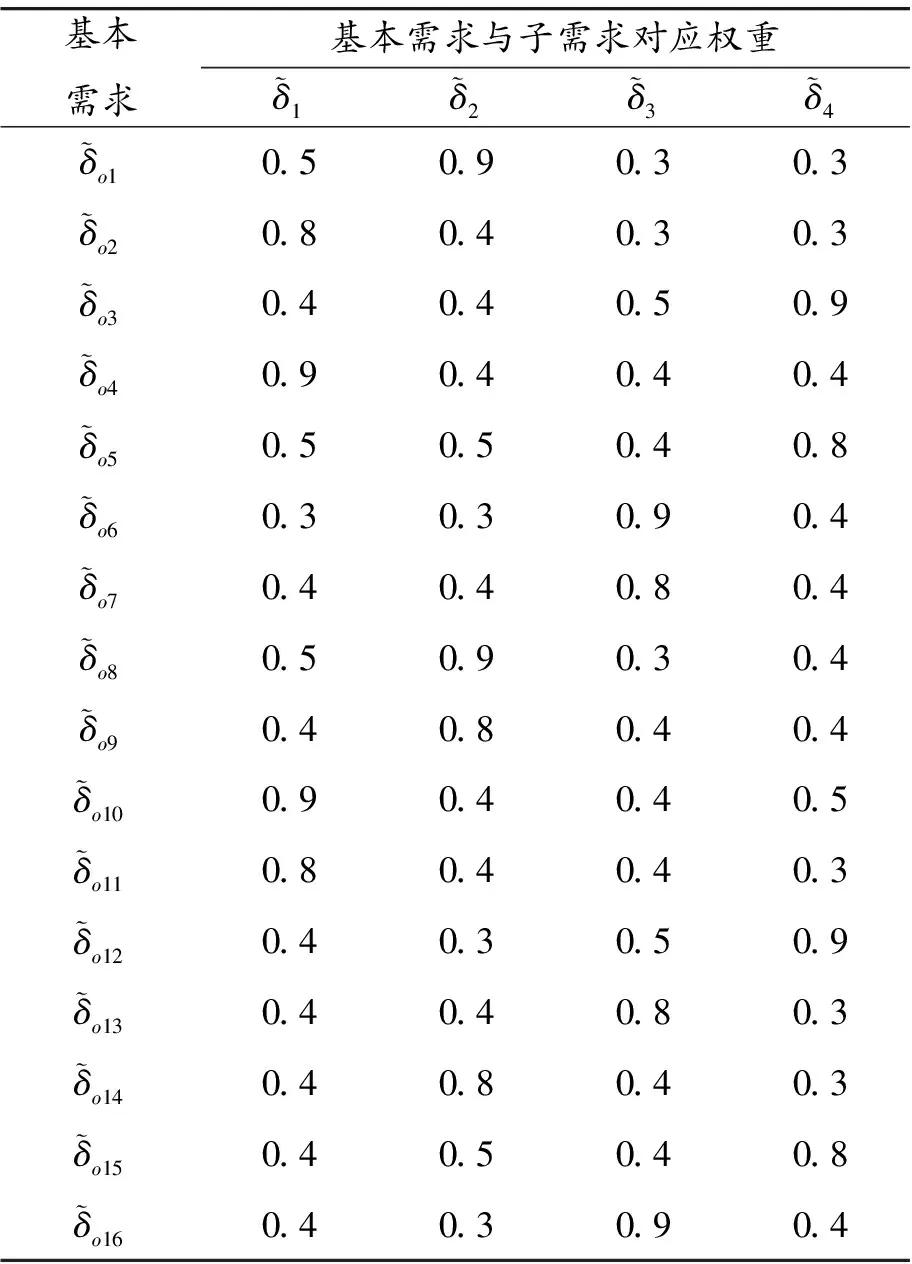
表6 液壓四足機器人基本需求與子需求對應權重
根據式(7)構建液壓四足機器人的需求特征模糊關系的相似矩陣:




由此可知,液壓四足機器人在非結構環境下的16種基本需求特征的解耦示意圖如圖3所示。同時根據α取值不同形成需求的細化分層。
QFD團隊專家對液壓四足機器人在非結構環境下的各項需求進行重要度評價,結合團隊專家對需求特征隱性知識定量化表達,建立液壓四足機器人需求特征與工程特性的產品質量屋。因不考慮工程特性之間的關系,故在產品質量屋中忽略屋頂,如表7所示,反映了需求特征與工程特性之間的相關性,在產品設計初期為企業指明了方向。
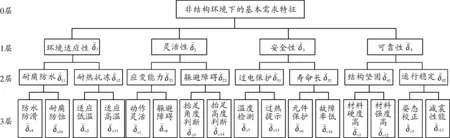
圖3 非結構環境下的基本需求特征解耦示意圖

表7 液壓四足機器人產品質量屋
利用式(3)對液壓四足機器人的工程特性進行計算并對其歸一化,重要度排序如表8所示。
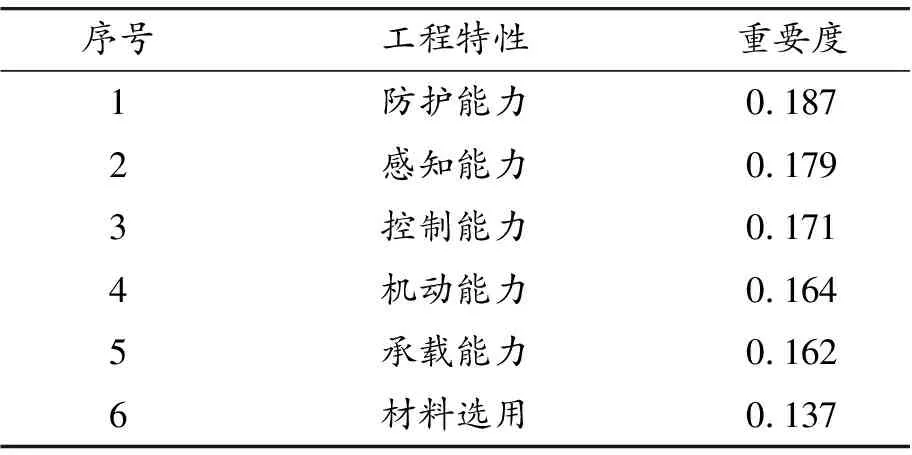
表8 液壓四足機器人工程特性重要度排序
3 液壓四足機器人結構設計
3.1 功能-原理-行為-結構模型
Gero J S等首先提出了功能-行為-結構(function-behavior-structure,FBS)的概念,將產品初期分為功能建模、行為建模、結構建模這3個設計階段。國內學者廖瑩[14]在此基礎上引入了原理模型,提出了FPBS的迭代層次映射,使產品在設計初期綜合考慮功能、原理、行為、結構這四方面要素,實現自頂至下多層次創新產品設計。同時,實現自底至上的產品結構綜合,建立產品初期的拓撲模型是實現產品模型設計的重要工具,基于FPBS產品設計流程如圖4所示。
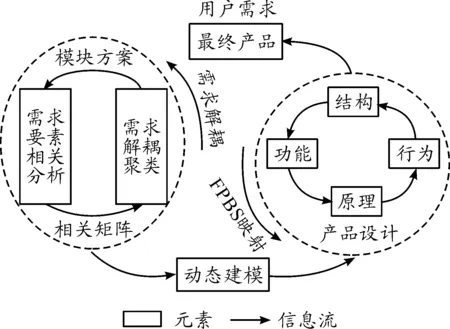
圖4 基于FPBS產品設計流程
3.1.1功能
功能(function)包含3個方面內容:① 系統觀點,功能是系統輸入與輸出以及元素變量間的抽象概念,描述輸入輸出關系的流程圖表示功能結構,一般用于產品功能設計模塊;② 用途觀點,用來描述產品設計意圖,將產品工作能力抽象化,用于用戶需求模塊;③ 行為觀點,將功能看作物理行為,用于產品原理設計模塊。
3.1.2原理
原理(principle)是實現產品特定功能的方法,一般包含兩方面內容:① 物理效應,自然界現象的規律結果;② 功能載體,實現物理效應的實體,例如運動特性、機械特性、幾何特性等,從功能到原理的映射如圖5所示。
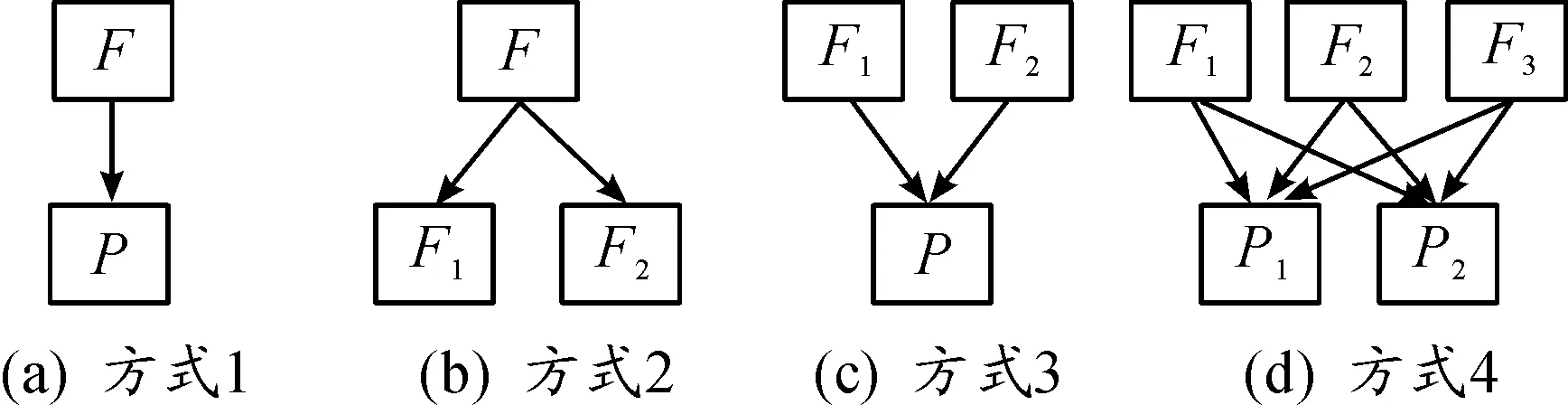
圖5 功能-原理映射方式
3.1.3行為
行為(behavior)由原理產生且為原理的表現,通過產品多行為配合得以行為實現。產品行為由產品構件參數描述,例如位移、速度、加速度、角位移、角速度、角加速度和作用力等。從原理到行為的映射方式如圖6所示。
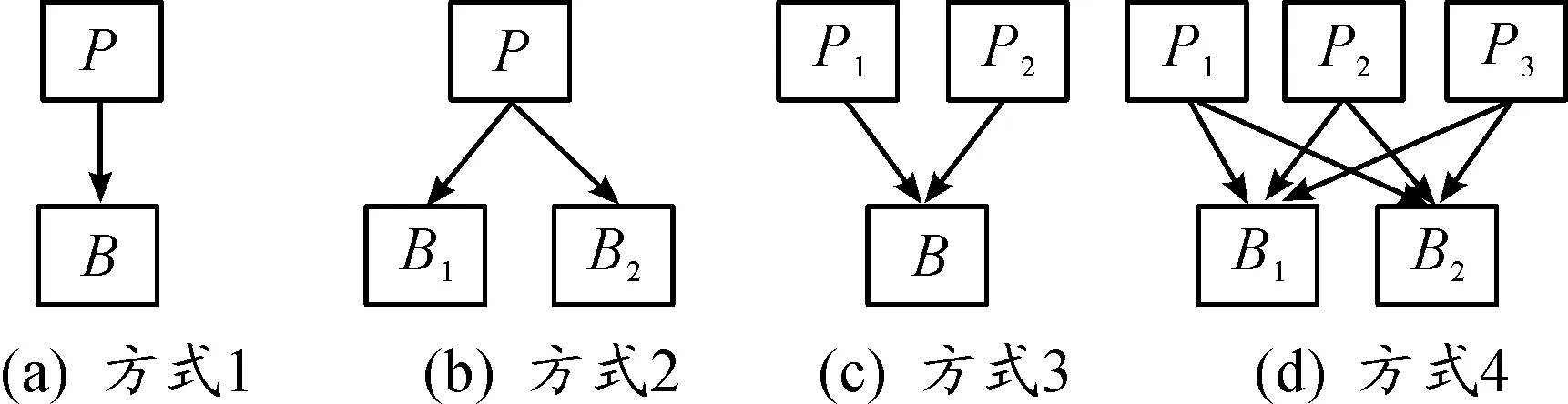
圖6 原理-行為映射方式
3.1.4結構
結構(structure)是實現產品功能-原理-行為采用的構件以及之間的組成關系。物理結構指完整的產品、元件或幾何特征,從行為到結構的映射方式如圖7所示。
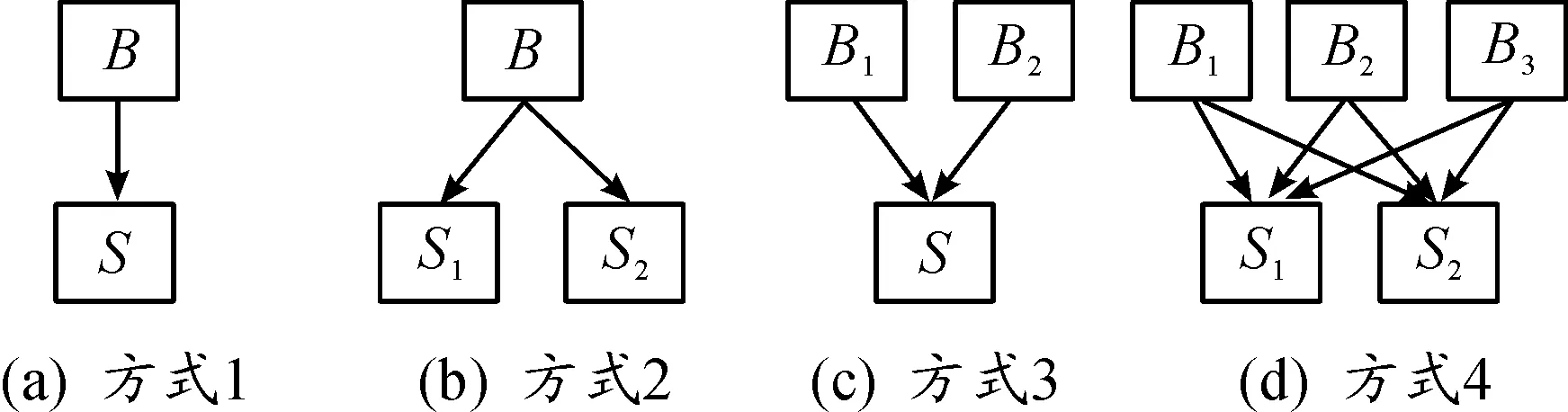
圖7 行為-結構映射方式
3.2 基于功能-原理-行為-結構模型的液壓四足機器人設計
由2.3節可知,液壓四足機器人16種基本需求特征根據α的取值不同進行了解耦,得到逐步細化的需求聚類,并將需求與工程特性通過質量屋進行一一映射,實現工程特性的定量化表達。最后,QFD團隊專家結合已有知識與相關科學原理,利用FPBS映射方法對液壓四足機器人在非結構環境需求下進行結構設計,整理可得功能-原理-行為-結構的映射,如表9所示。
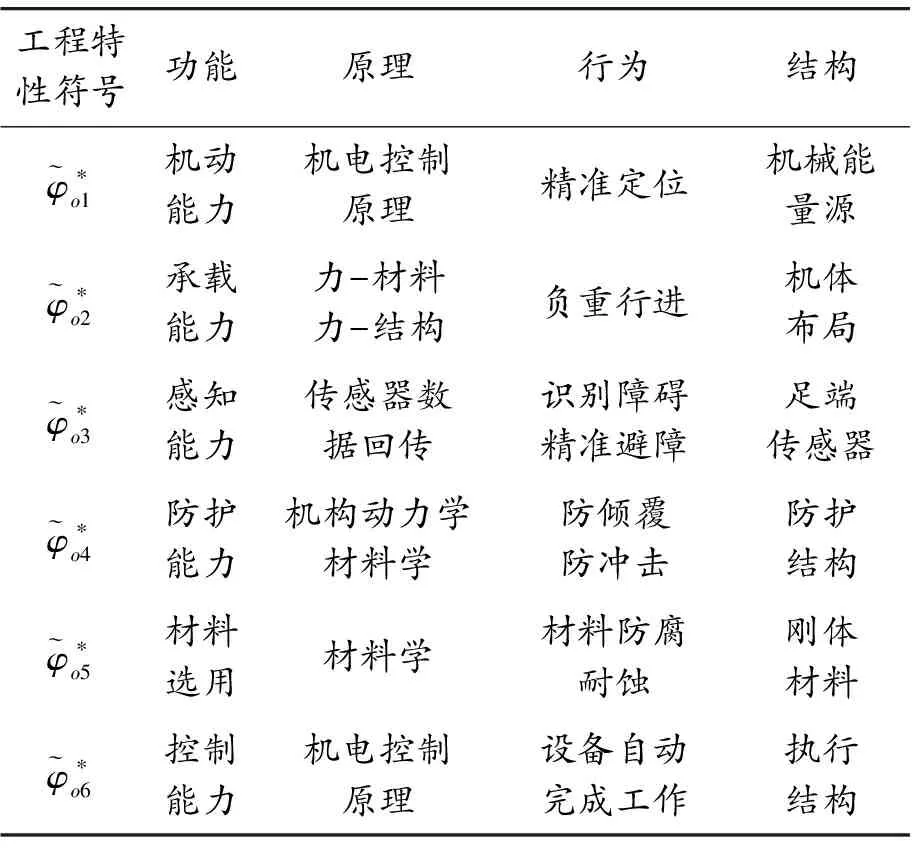
表9 液壓四足機器人的FPBS映射
行為是功能的表現,由原理產生,并通過結構實現。由FPBS映射表可知機器人的6項基本行為。由于篇幅限制,以負重行進為例,為實現液壓四足機器人的承載能力,機體采用剛體結構設計,該結構由相容行為的剛體執行構件組成,能夠形成穩定的機體結構。當所有執行構件執行其運動行為時,也具有結構的平穩性,是機體合理布局的基礎。其次,剛體機構可適應多變的環境,在機器人行進過程中,采用懸掛方式完成物資的快速運輸,實現負重前行的功能,達到力-材料、力-結構的原理準則。此外,機體所有構件的行為不相矛盾,可以共存,實現了行為的相容性原則。
從FPBS映射表中獲取液壓四足機器人各功能的初步結構如下:
QFD團隊專家利用已有經驗與FPBS映射關系,將以上子功能結構進行匯總,得到滿足非結構環境需求下的液壓四足機器人(如圖8所示)。

圖8 液壓四足機器人設計方案
該液壓四足機器人為4自由度配置,其中膝關節、臀部側展關節、臀部擺臂關節為主動運動關節,由3條液壓缸推動關節實現鉸接運動;足部為被動自由度。為減少運動時地面對機器人結構的沖擊,膝關節與足端之間安裝彈簧起到緩沖作用,通過液壓缸活塞桿的收縮實現各關節轉動。
與之相比,國外學者也對液壓四足機器人進行了相關研究。以美國波士頓動力學公司的Big Dog機器人[15]為例,該機器人可進行多步態行走、跳躍1 m寬壕溝、爬越35°斜坡,最大運行速度可達18 km/h,達到步兵徒步急行軍的速度要求。但傳統方法一般通過仿真和片段性的模擬場景來驗證機器人的總體性能,以仿真數據證明方法的實用性,較少對環境需求進行有效分析。但在真實的野外環境中,對需求的合理遴選與聚類是機器人設計的重要基礎。本文采用模糊非解耦模型與FPBS耦合的設計方法對機器人進行設計,該設計方法的優點在于通過對非結構環境下的需求進行系統性分析,從功能、原理、行為、結構共4個方面分別進行考慮,得到滿足要求的液壓四足機器人設計方案,使機器人結構清晰、合理,提高了液壓四足機器人設計的科學性。
4 結論
本文提出了模糊非解耦模型與FPBS耦合的設計方法,并將其應用于非結構環境需求下的液壓四足機器人設計中。該耦合方法與傳統產品設計理論相比,解決了傳統方法對仿真數據分析的局限性及依賴性問題。從多個角度加以考慮,對復雜環境進行分析,將需求合理聚類,改進了產品設計流程,為產品設計提供初始依據,并從功能、原理、行為、結構4個方面實現自頂至下多層級的設計與自底至上的結構綜合,提高模塊間的內聚程度,在產品設計中具有引導性,具備如下特點:
1)采用模糊非解耦模型將信息定量分析,提高評判的準確性,實現產品結構綜合,以及產品的快速構型,進一步滿足了設計要求。
2)基于功能-原理-行為-結構的映射關系,將產品的功能、原理、行為與結構的縱向迭代設計清晰地表達,同時產品模型的橫向設計體現了功能、原理與結構間的信息參數關聯,實現對需求的快速響應,具備結構的相對獨立性,為產品設計提供了有力支持。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
哲學評論(2021年2期)2021-08-22 01:53:34
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
中國生殖健康(2019年11期)2019-01-07 01:28:02
商用汽車(2016年11期)2016-12-19 01:20:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12