視覺傳感器在智能汽車上的應用
2019-10-21 07:18:28王鵬
汽車實用技術 2019年23期
關鍵詞:應用
王鵬

摘 要:目前,我國要將汽車打造成移動出行的智能平臺,構建用戶移動出行全新生態體驗,將來我國的汽車將會實現電動化、網聯化、智能化和共享化的新四化建設。文章介紹了目前智能汽車上的視覺傳感器類型及作用,并對視覺傳感器在智能汽車上的應用方式做了較為詳細的說明,以期促進智能汽車的穩定發展。
關鍵詞:智能汽車;視覺傳感器;應用
中圖分類號:TP212.9 ?文獻標識碼:A ?文章編號:1671-7988(2019)23-41-03
Vision Sensor Application in Smart Cars
Wang Peng
( Shanxi Institute of Mechanical & Engineering, Shanxi Changzhi 046011 )
Abstract: At present, China needs to make cars an intelligent platform for mobile travel, and build a new ecological experience for users to travel. In the future, China's automobiles will realize the new construction of electricization, networking, intelligence and sharing. This paper introduces the types and functions of visual sensors on smart cars, and gives a detailed description of the application of visual sensors on smart cars, in order to promote the stable development of smart cars.
Keywords: Smart Cars; Vision sensor; Application
CLC NO.: TP212.9 ?Document Code: A ?Article ID: 1671-7988(2019)23-41-03
引言
智能汽車,就是在傳統汽車上增加了先進的傳感器(雷達、攝像)以及控制技術,通過先進傳感器和控制單元實現與人、車、路以及衛星等的信息交換,使車輛能夠感知周圍環境,能夠自動分析車輛是否處于安全狀態,并使車輛按照人的意愿到達目的地,最終實現替代人來操作的目的。
視覺傳感器是智能汽車的“眼睛”,它利用計算機視覺技術,模仿人眼視覺機理,通過處理攝像鏡頭捕捉的圖像,獲得引導信息,其主要功能是獲取足夠的機器視覺系統要處理的最原始圖像。
1 視覺傳感器在智能汽車上的分類
目前智能汽車上根據攝像頭模塊的不同,可以分為單目攝像頭,雙目攝像頭,三目攝像頭以及紅外攝像頭。
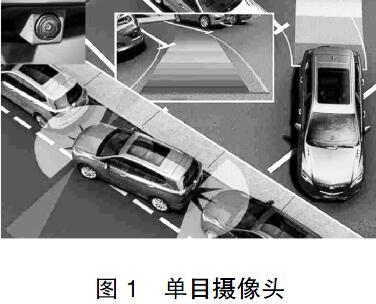
圖1 ?單目攝像頭
單目攝像頭(如圖1所示)目前在智能汽車上可識別40米~120米的范圍,未來將達到200米或更多。單目攝像頭的視角越寬,可以檢測到的精確距離長度越短,視角越窄,檢測到的距離越長。
雙目攝像頭(如圖2所示)在20米范圍內具有明顯的測距優勢,在20米以外,很難縮小視差的范圍。采用高像素攝像頭和較好的算法可以提高測距性能,雙目攝像頭間距越小,測距鏡頭之間的距離越近,探測距離越大,鏡頭間距越大,探測距離越遠。
圖2 ?雙目攝像頭
三目攝像頭(如圖3所示)的劃分為25°視場、50°視場、150°視場,25°視場用于檢測前車道線、交通燈,50°視場負責一般的道路狀況監測,150°視場用于檢測平行車道、行人和非機動車行駛的狀況。
圖3 ?三目攝像頭
紅外攝像頭(如圖4所示)采用紅外線技術,安裝在車內后視鏡的前方,駕駛員可以像白天一樣透過燈光顯示系統看到道路的行駛條件。當兩輛車相遇時,可以大大減少對車前駕駛員的視力刺激,也可以提高駕駛員在霧中辨別的能力。
圖4 ?紅外攝像頭
2 視覺傳感器在智能汽車上的應用
智能駕駛汽車的視覺傳感器可實現車道偏離警告、前方碰撞預警、交通標志識別、盲點監控、駕駛人注意力監控、停車輔助等功能。
以特斯拉Autopilot 2.0 L2級(如圖5所示)為例,智能駕駛汽車擁有三個前視攝像頭,三個后視攝像頭,兩個側視攝像頭,12個超聲波雷達和一個安裝在車身上的前毫米波雷達。
圖5 ?特斯拉視覺傳感器
(1)車道偏離警告
車道偏離警告系統(如圖6所示)是一種輔助駕駛員通過警告來減少因為車道偏離引起的交通事故的系統,系統構成主要包括毫米波雷達、激光雷達和攝像頭等部件。在汽車將要偏離當前車道線時,系統通過方向盤震動以及顯示屏的警告燈閃爍通知駕駛員注意行駛安全性;當要進行超車時,可以打開轉向燈,這時車道偏離警告不工作。
圖6 ?車道偏離警告系統
(2)汽車防碰撞預警系統
汽車防撞預警系統(如圖7所示)主要用于協助駕駛員避免高速、低速追尾,高速中無意識偏離車道,與行人碰撞等重大交通事故。汽車防撞預警系統是基于智能視頻分析處理技術,通過動態視頻攝像技術、計算機圖像處理技術來實現其預警功能。
圖7 ?汽車防碰撞預警系統
(3)交通標志識別
圖8 ?交通標志識別系統
車輛安全系統的交通標志識別系統(如圖8所示)通過特征識別算法,利用前置攝像頭組合模式識別道路上的交通標志,提示警告或自動調整車輛運行狀態,從而提高車輛的安全性和合規性,提醒駕駛員注意前方的交通標志。
(4)盲點監測
盲點監測系統(如圖9所示)又稱并線輔助系統,主要功能是掃除后視鏡盲區并通過側方攝像頭或雷達將車左右后視鏡盲區內的影像顯示在車內。由于車輛后視鏡中有一個視覺盲區,因此在換道前無法看到盲區中的車輛。如果盲區內有超車車輛,則會發生車道碰撞,在大雨、霧天、夜間光線暗淡的情況下,更難看到后面的車輛,換道更危險。
圖9 ?盲點監測系統
(5)駕駛員注意力監控系統
駕駛員注意力監控系統(如圖10所示)也稱為疲勞監測系統或注意力輔助系統,疲勞駕駛預警系統是一種基于駕駛員生理反應特性的駕駛員疲勞監測預警技術。通過不斷檢測駕駛員的駕駛習慣,可以感覺到駕駛員在疲勞駕駛后及時向駕駛員發出警告,提醒駕駛員應適當在安全島停車休息。
圖10 ?駕駛員注意力監控系統
(6)停車輔助
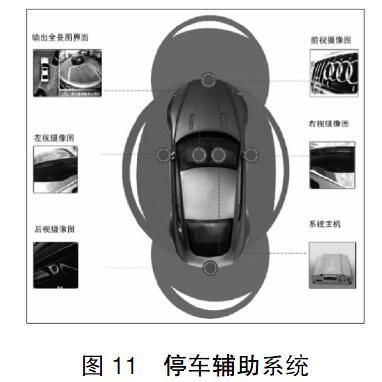
停車輔助系統(如圖11所示)是用于停車或倒車的安全輔助裝置,有手動和自動兩種類型的汽車倒車輔助。停車輔助系統包括多個安裝在汽車周圍的攝像頭、圖像采集組件、
視頻合成/處理組件、數字圖像處理組件和車輛顯示器。這些裝置可以同時采集車輛周圍的圖像,對圖像處理單元進行變形恢復→視圖轉換→圖像拼接→圖像增強,最終形成車輛360°全景仰視圖。
圖11 ?停車輔助系統
3 結論
隨著視頻圖像處理技術的日臻完善,智能汽車上視覺傳感器的應用范圍會越來越廣泛,在未來它很有可能應用在行人碰撞預警、車道保持輔助以及無人駕駛方面,這種技術有利于提升汽車的整體性能以及交通安全性,促進汽車行業的整體發展。
參考文獻
[1] 催勝民.一本書讀懂智能網聯汽車[M].北京:北京工業出版社, 1992.
[2] 李立.智能汽車:先進傳感與控制[M].北京:機械工業出版社,2016. 11.
[3] 李儼.5G與車聯網——基于移動通信的車聯網技術與智能網聯汽車[M].北京:電子工業出版社,2019.3.
[4] 催勝民.智能網聯汽車先進駕駛輔助系統關鍵技術[M].北京:化學工業出版社,2019.4.
[5] 360獨角獸安全團隊.智能汽車安全攻防大揭秘[M].北京:電子工業出版社,2017.9.
[6]于立萍.基于單目視覺的智能汽車行人檢測技術研究[M].上海:人民郵電出版社,2018.2.
猜你喜歡
科技視界(2016年21期)2016-10-17 19:54:47
科技視界(2016年21期)2016-10-17 19:54:05
科技視界(2016年21期)2016-10-17 18:46:46
科技視界(2016年21期)2016-10-17 18:37:58
科技視界(2016年21期)2016-10-17 18:28:05
考試周刊(2016年76期)2016-10-09 08:45:44
大學教育(2016年9期)2016-10-09 08:28:55
科技視界(2016年20期)2016-09-29 14:22:00
科技視界(2016年20期)2016-09-29 12:03:12
科技視界(2016年20期)2016-09-29 11:47:01
