滾球系統(tǒng)中機(jī)器視覺與電機(jī)調(diào)控的關(guān)聯(lián)研究
2019-10-31 07:00:03彭昕昀陳錦儒
電腦知識與技術(shù) 2019年22期
關(guān)鍵詞:機(jī)器視覺
彭昕昀 陳錦儒

摘要:隨著科技快速發(fā)展,研究機(jī)器視覺與自動化設(shè)備的過程控制之間的關(guān)聯(lián)成了一個新熱點問題。本文以板球控制系統(tǒng)為研究對象,探討機(jī)器視覺與電機(jī)調(diào)控的關(guān)聯(lián)。基于機(jī)器視覺與電機(jī)的PID運動控制為設(shè)計背景,PC機(jī)控制工業(yè)相機(jī)獲得小球的實時位置信息,通過圖像處理轉(zhuǎn)換成小球的位置數(shù)據(jù)并使用串口傳輸?shù)絊TM32主控系統(tǒng),主控機(jī)獲取數(shù)據(jù)后實現(xiàn)小球的運動軌跡控制。整個系統(tǒng)設(shè)計過程中,機(jī)器視覺擔(dān)任著為電機(jī)調(diào)控提供實時數(shù)據(jù)的角色,為研究機(jī)器視覺與電機(jī)調(diào)控的關(guān)聯(lián)提供實驗基礎(chǔ)。
關(guān)鍵詞:機(jī)器視覺;運動控制;位置數(shù)據(jù);PID算法
中圖分類號:TP247? ? ?文獻(xiàn)標(biāo)識碼:A
文章編號:1009-3044(2019)22-0233-03
開放科學(xué)(資源服務(wù))標(biāo)識碼(OSID):
Research on the Relationship Between Machine Vision and Motor Control in Ball Rolling System
PENG Xin-yun, CHEN Jin-ru
(School of Physics and mechanical engineering, Shaoguan University, Shaoguan 512005, China)
Abstract: With the rapid development of science and technology, the research on the relationship between machine vision and process control of automation equipment has become a new hot issue.In this paper, the cricket control system is taken as the research object, and the relationship between machine vision and motor control is discussed. Based on machine vision and PID motion control of the motor, the PC controls the industrial camera to obtain the real time position information of the small ball, which is converted into position data of the small ball through image processing and transmitted to the STM32 main control system through serial port. In the whole system design process, machine vision plays the role of providing real-time data for motor control, which provides the experimental basis for the research of the relationship between machine vision and motor control.
Key words: machine vision; Motion control; Location data; PID ALGORITHM
1 引言
隨著科技的快速發(fā)展,人工智能的不斷提出新型的控制概念。人工智能的發(fā)展已成為當(dāng)今科技快速發(fā)展的必備條件之一,其中作為人工智能的主要分支的機(jī)器視覺在工業(yè)發(fā)展中占有極大地位。社會上的工業(yè)生產(chǎn)總存在一些工作需要耗費大量人力以及不適合人工工作的環(huán)境,所以機(jī)器代替人工就成了當(dāng)今社會工業(yè)高速發(fā)展的必要需求,因此研究機(jī)器視覺與PID運動控制算法對工業(yè)發(fā)展極其重要。為了進(jìn)一步研究機(jī)器視覺系統(tǒng)與電機(jī)調(diào)控的關(guān)聯(lián),本文設(shè)計一個滾球控制系統(tǒng)模型,研究機(jī)器視覺對控制過程的影響。
2 系統(tǒng)模型
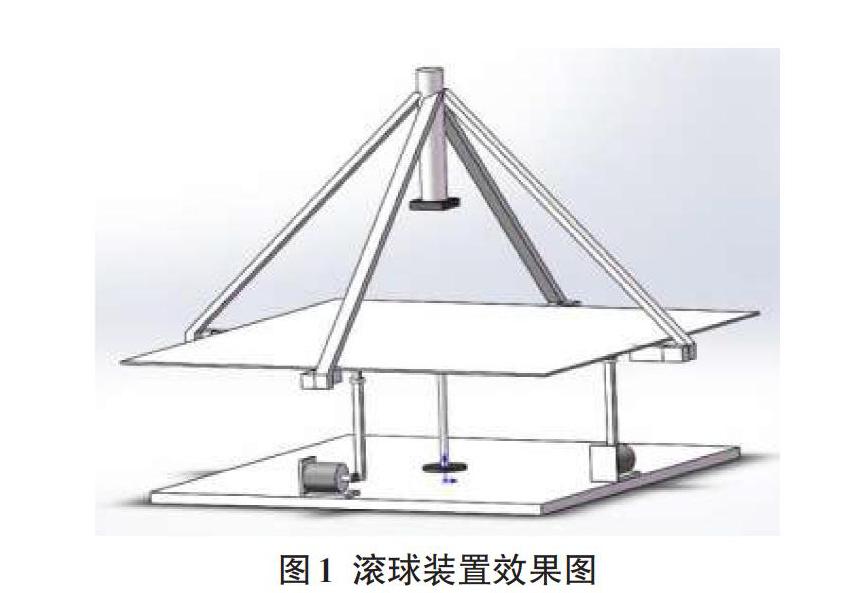
本文所設(shè)計的系統(tǒng)主要分成兩大部分:STM32控制的滾球裝置以及以PC機(jī)作為圖像處理核心的機(jī)器視覺系統(tǒng),其滾球裝置效果圖如下所示:
基于STM32控制的滾球裝置主要由LM2596S直流可調(diào)降壓穩(wěn)壓電源模塊實現(xiàn)電壓轉(zhuǎn)換,為整個裝置提供電源;控制核心STM32根據(jù)在PC機(jī)上開發(fā)的機(jī)器視覺系統(tǒng),控制工業(yè)相機(jī)捕捉小球?qū)崟r圖像信息并進(jìn)行圖像識別,獲取小球當(dāng)前位置數(shù)據(jù)。
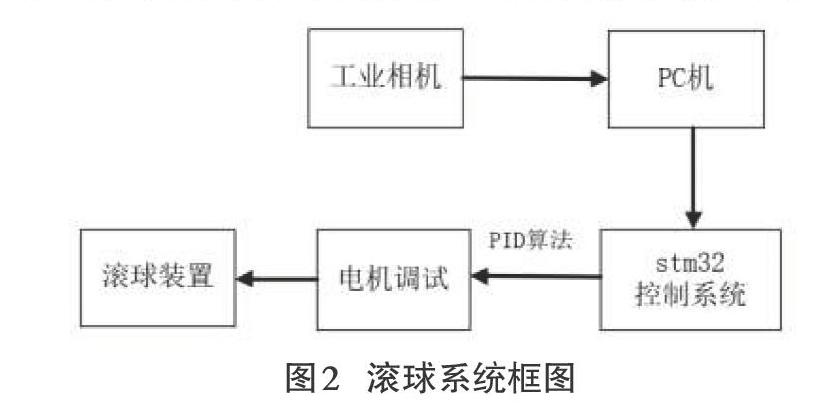
輸出PWM信號驅(qū)動MG995舵機(jī)實現(xiàn)運動控制;使用串口通信的方式把小球位置數(shù)據(jù)傳輸?shù)交赟TM32作為主控核心的滾球裝置上,控制滾球裝置上的小球?qū)崿F(xiàn)定點平衡靜止,畫直線運動,畫矩形操作等功能演示。其系統(tǒng)框圖如下圖所示:
3 機(jī)器視覺與電機(jī)調(diào)控的關(guān)聯(lián)
滾球控制系統(tǒng)的軟件設(shè)計主要包含兩大部分,分別是滾球的跟蹤與識別與舵機(jī)的運動控制。其中滾球的數(shù)據(jù)采集主要在Open CV圖像開發(fā)平臺上進(jìn)行機(jī)器視覺系統(tǒng)開發(fā)程序編程,其中程序主要由仿射變換,輪廓提取,顏色識別;而舵機(jī)的控制主要依賴機(jī)器視覺系統(tǒng)提供滾球位置數(shù)據(jù)從而使用PID算法進(jìn)行控制。為了更進(jìn)一步研究機(jī)器視覺與舵機(jī)的控制聯(lián)系,系統(tǒng)設(shè)置了按鍵輸入端,通過按鍵輸入指令切換舵機(jī)的控制模式,滾球?qū)崿F(xiàn)各種軌跡運動。
STM32控制系統(tǒng)調(diào)用工業(yè)相機(jī)進(jìn)入圖像捕捉模式,獲取裝置底板四個頂點的數(shù)據(jù)以及小球的輪廓提取,調(diào)用迭代算法進(jìn)行迭代,然后進(jìn)行仿射變換,再使用顏色識別和輪廓提取等算法獲得小球的準(zhǔn)確的位置信息,把小球的位置數(shù)據(jù)經(jīng)過串口通訊傳輸?shù)絊TM32主控系統(tǒng),結(jié)合小球的位置信息調(diào)用PID運動算法進(jìn)行舵機(jī)的運動軌跡規(guī)劃,實現(xiàn)相對應(yīng)的操作功能。其整體流程圖如下所示:
3.1 小球顏色識別與輪廓提取
Open CV識別顏色主要是利用不同的顏色RGB/HSV直方圖不同作為判定依據(jù)的。用HSV空間進(jìn)行比較準(zhǔn)確度比RGB直方圖比對準(zhǔn)確度更高。每種顏色均有不同的RGB直方圖,也可以用HSV直方圖來表示。RGB直方圖代表的是紅色,綠色,藍(lán)色分量。HSV分別代表顏色空間,飽和度,亮度。
小球的輪廓提取算法主要調(diào)用Open CV機(jī)器視覺庫自帶的圖像算法,其主要原理為將獲取到的圖像先進(jìn)行二值化,然后通過邊緣檢測算子將輪廓檢測出來,為了去除最小噪點,加入高斯濾波去噪以及形態(tài)學(xué)開運算。
3.2 仿射變換算法
仿射變換是一種二維坐標(biāo)之間的變換,變換前后保持圖形的平直性和平行性。仿射變換可以理解為是向量經(jīng)過一次線性變換和一次平移變換。所以運用仿射變換算法可以把圖像進(jìn)行旋轉(zhuǎn)、平移、縮放操作等功能。本文采用放射變換算法將攝像頭獲取到板的圖像旋轉(zhuǎn)平移等操作,從而保證了小球在板上的位置數(shù)據(jù)的準(zhǔn)確性。
3.3 滾球運動控制PID算法
本文使用的PID算法進(jìn)行滾球控制主要根據(jù)機(jī)器視覺系統(tǒng)檢測反饋來偏差信號,并通過偏差信號來控制舵機(jī)運動。PID算法包含比例、積分、微分,比例是對設(shè)定值和實測值兩者差值的放大倍數(shù);增大比例值對于滾球控制系統(tǒng)可以減少小球從不平衡狀態(tài)到平衡狀態(tài)的時間,但是比例值超調(diào)就會引起板震蕩。微分是指上一次設(shè)定值和實測值兩者誤差和當(dāng)前設(shè)定值和實測值兩者誤差的差值,根據(jù)這個值的變化的快慢實現(xiàn)滾球控制系統(tǒng)調(diào)節(jié),微分調(diào)節(jié)對于滾球控制系統(tǒng)來說是超前預(yù)測,當(dāng)它的值越大,預(yù)測控制的作用就會越明顯,在一定程度上緩解比例值超調(diào)帶來的震蕩作用。積分指是對設(shè)定值和實測值兩者差值的在時間上進(jìn)行累加,當(dāng)累加值達(dá)到一定值時進(jìn)行處理,從而避免產(chǎn)生振蕩現(xiàn)象,但積分的調(diào)節(jié)存在滯后性,而且積分值超調(diào)越嚴(yán)重,滯后效果越明顯。
結(jié)合機(jī)器視覺系統(tǒng)的延時特性,在本次滾球控制系統(tǒng)的調(diào)節(jié)過程中采用了PD調(diào)節(jié)方式,控制順序是先進(jìn)行位置環(huán)調(diào)節(jié)再對速度環(huán)調(diào)節(jié)。本文主要用到的公式如下所示:
輸入 e(t)與輸出 U(t)的關(guān)系為:
傳遞函數(shù)為:
[D(s)=U(s)E(s)=Kp(1+1Ts+Tds)]? ? ? ? ? ? ? ? ? (2)
4 系統(tǒng)測試
本文研究的滾板球控制系統(tǒng)主要根據(jù)機(jī)器視覺的數(shù)據(jù)實現(xiàn)小球繪制直線運動、矩形運動、鼠標(biāo)回調(diào)定點等功能,為了更好調(diào)試系統(tǒng)功能,使用了輕觸按鍵進(jìn)行功能分類調(diào)試,得出以下表格數(shù)據(jù)。
4.1 定點的測試數(shù)據(jù)
4.2 直線功能的測試數(shù)據(jù)
在這個測試過程中,滾球控制系統(tǒng)的精度主要依賴機(jī)器視覺系統(tǒng)傳輸回來的數(shù)據(jù)準(zhǔn)確性以及傳輸滯后性。從實驗結(jié)果可以看出,機(jī)器視覺系統(tǒng)在電機(jī)調(diào)控過程中重要定位,電機(jī)調(diào)控的可靠性主要由機(jī)器視覺系統(tǒng)決定。
5 結(jié)束語
本文利用滾球控制系統(tǒng)進(jìn)行研究機(jī)器視覺與電機(jī)調(diào)控的關(guān)聯(lián),系統(tǒng)通過PC端上的機(jī)器視覺系統(tǒng)將小球的位置數(shù)據(jù)傳輸?shù)娇刂葡到y(tǒng)上實現(xiàn)模式調(diào)控。通過實驗操作對機(jī)器視覺與電機(jī)調(diào)控的關(guān)聯(lián)進(jìn)行探討,為往后研究機(jī)器視覺與過程控制提供案例參考。
參考文獻(xiàn):
[1] 趙冬.機(jī)器視覺技術(shù)及其在機(jī)械制造自動化中的應(yīng)用[J].電子技術(shù)與軟件程,2019(8):125.
[2] 黃金榮,張冰雪,張懸光,李瑞豐.基于機(jī)器視覺的顏色識別系統(tǒng)設(shè)計[J].山東工業(yè)技術(shù),2019(12):208.
[3] 王憲倫,姜鵬鵬.一種滾球法測橡膠粘度的視覺矯正算法研究[J].機(jī)電工程,2018,35(2):166-169.
[4] 李世甲,萬超,李海龍,藺瑞英.基于PID控制器的滾球控制系統(tǒng)設(shè)計與制作[J].裝備制造技術(shù),2017(11):68-70.
【通聯(lián)編輯:梁書】
猜你喜歡
軟件導(dǎo)刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(shù)(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導(dǎo)刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
