一種低功耗低成本的數字化查表控制方法
——以Buck轉換器的PID控制為例
2019-11-12 07:06:24祝博文劉蒙瑞申樹杰
長沙大學學報 2019年5期
關鍵詞:模型
吳 了,祝博文,劉蒙瑞,申樹杰
(長沙學院電子信息與電氣工程學院,湖南 長沙 410022)
相較于模擬控制器,數字控制器具有高度靈活性、可配置性的優勢,因此有更強的環境適應能力.數字控制器一般由MCU、FPGA等控制器實現,被包含在控制環路中,與執行器一道形成反饋,由配置的相應控制規則,控制執行機構得到所期望的控制輸出.由于數字控制器處理的是數字信號,而執行器一般接受、處理并輸出模擬信號,所以反饋環路中應包括ADC和DAC模塊,與數字控制器一起實現所期望的控制輸出.
ADC和DAC模塊的使用帶來兩個問題,一是延遲問題,二是精度問題.延遲要么受限于低成本控制器的主頻時鐘和密集計算,要么受制于ADC和DAC的轉換速率;而精度則要考慮ADC和DAC引入的量化誤差,和控制器在計算過程中引入的精度損失.這兩個問題帶來的后果是系統環路穩定性的降低,和執行器控制目標精度的下降.
由于低成本MCU難以實現快速計算,導致環路延遲和精度指標下降,所以文中給出了一種查表控制方法,目的是降低控制器的密集計算,減少延遲,降低功耗和應用成本.文中將以Buck轉換器PID控制為例,闡述查表控制方法.
1 數字控制器中各模塊設計指標考慮
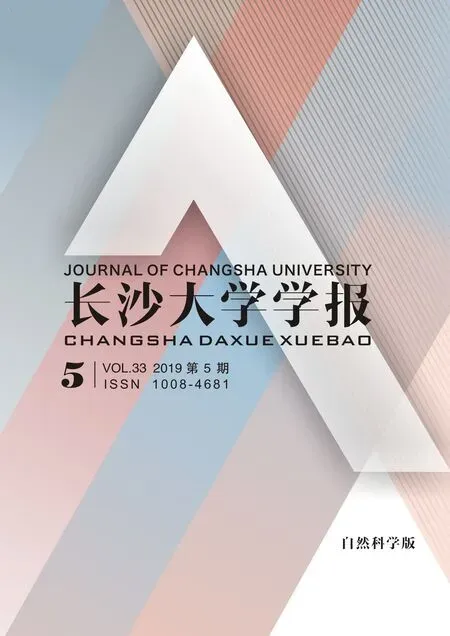
圖1是數字控制Buck轉換器的電路模塊圖,其中數字控制部分包括ADC、DAC和PID計算控制模塊,執行器部分則是由功率開關和輸出濾波電路組成的一個Buck轉換器的功率級.反饋控制通過求轉換器輸出電壓與參考電壓的差,得到誤差量,然后對誤差量根據控制規則經一系列計算后,控制Buck電路的占空比,調節其輸出電壓,最終使輸出電壓受控.
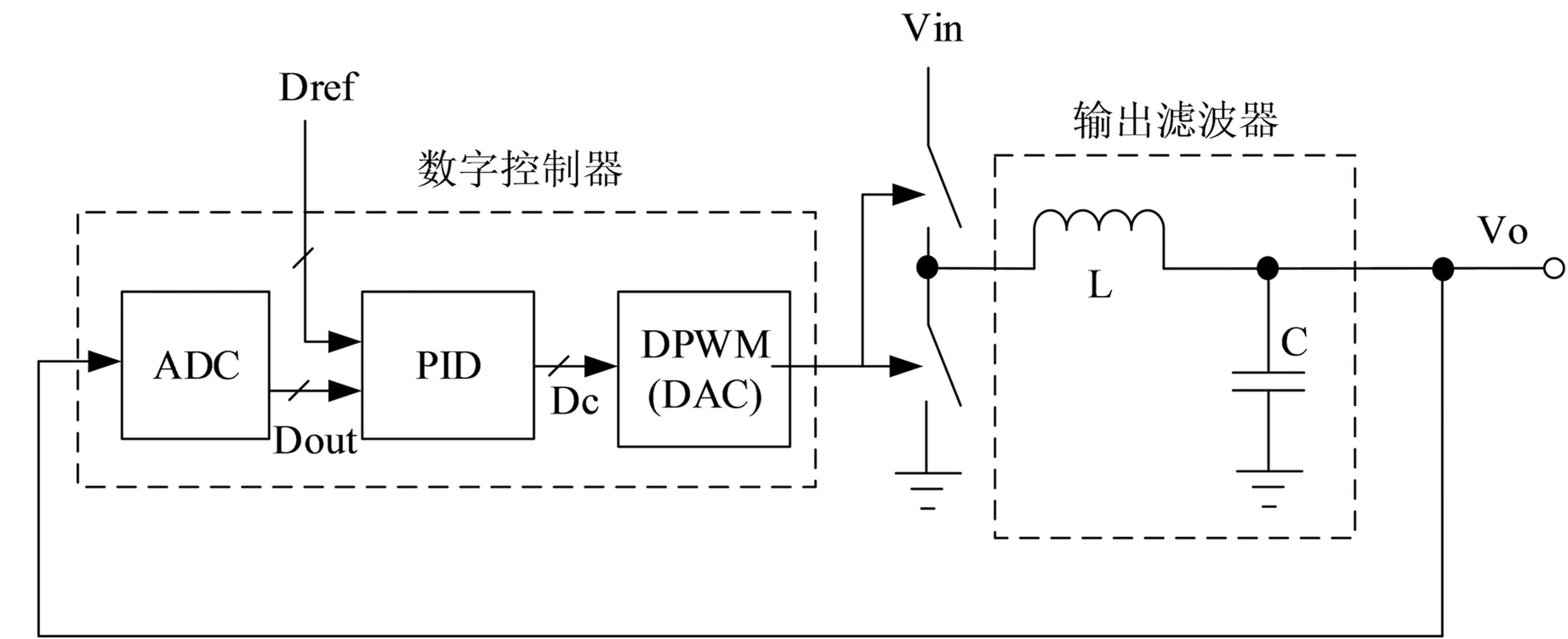
圖1 數字控制的Buck轉換器的電路模塊圖
要實現Buck轉換器穩定可控,要考慮數字控制器中ADC與DAC的性能指標.
首先是ADC位數的確定.事實上,ADC的最低量化級別應小于轉換器的輸出紋波量,以實現對輸出電壓的控制.在穩態情況下,由于Buck轉換器輸出紋波變化范圍不大,所以ADC具有較小的動態轉換范圍,僅需少量控制字進行控制.例如,假設ADC的VREF為3.3 V,對一個Vin=12 V和Vo=5 V的Buck轉換器,要使輸出電壓紋波被控制在1%以內,計算后易得,使用ADC的最小位數是7位.注意到為了減少ADC的延遲,Buck轉換器中的ADC一般采用flash ADC或延遲線ADC.
接著是DPWM位數的確定.基于MCU實現的數字控制器,DPWM一般由MCU內置的定時器來實現,等效于數字控制系統中DAC.DPWM的最小量化誤差應小于ADC的最小量化誤差,以實現輸出電壓可控.所以隨著使用ADC位數的增加,則要增加DPWM的分辨率.這樣,為了達到預期更高的開關頻率,就必須選擇更高主頻時鐘的MCU,導致一些低成本的MCU不能被使用.因此,最終DPWM使用的位數需要折中.注意到DPWM是設計高開關頻率Buck轉換器的一個技術瓶頸[1-2].
最后是設計PID控制器,得到預先計算的表值.考慮到一旦環路負反饋穩定后,轉換器的輸出電壓和參考電壓將十分接近,兩電壓求差后的誤差量將非常小,接近于0,因此,在一定變化范圍內,誤差量的變化范圍十分有限,完全可以通過建立模型,對整個系統進行數值仿真,將得到的計算值做成表放入低成本MCU中,實時對整個系統進行控制,以降低功耗,達到穩定輸出的目的.
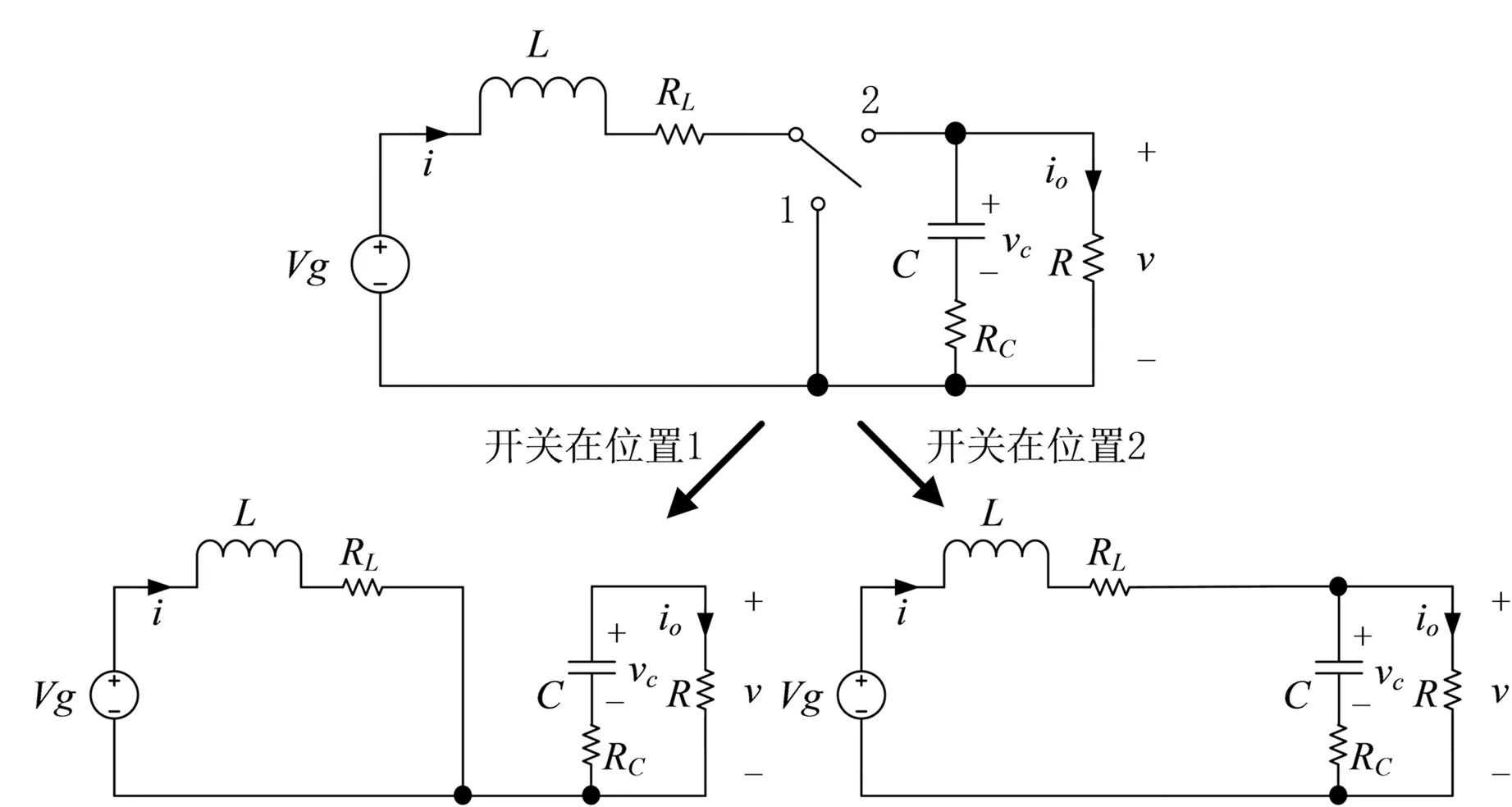
圖2 Buck轉換器在一個開關周期內的兩個運行階段
如圖2所示為連續導通模式下Buck轉換器在一個開關周期內的兩個運行階段.Buck轉換器每一運行階段的狀態空間方程可以分別被表示為式(1)與式(2).
2 Buck轉換器建模與PID控制器表值獲取
為了設計控制規則,需要全面了解執行器的運行特點.Buck轉換器本質上是一個非線性執行器.若在一個開關周期內取平均,忽略開關頻率以外的高次諧波,則可獲得其平均等效模型.
(1)
(2)
在一個開關周期內,通過引入占空比d(t)(0≤d(t)<1),結合式(1)和式(2),對狀態空間方程中的系數取平均,易得Buck轉換器的平均狀態空間模型,由式(3)和式(4)所示.
(3)
(4)
根據式(3)和式(4)容易搭建輸入參數為占空比d,Vg和io,輸出參數為v和i的仿真模型.基于此模型,根據性能指標,可以設計出所需的PID控制器.PID控制器的傳輸函數可以被表示為
(5)
這里參數KPA,KIA和KDA分別表示比例、積分和微分參數[3].其中第三項微分項放置一個極點的目的在于限制高頻帶寬,抑制高頻噪聲,其中γ為極點因子,調它使傳遞函數離散化后的極點位于單位圓內,以保證穩定.
不像文獻[4]所采用的直接建模方法,為得到PID的表值,文中首先使用式(5)在連續域得到滿足Buck轉換器性能指標的控制器;然后,對得到控制器的傳輸函數進行差分離散化[5];最后,根據得到的差分方程,結合Buck轉換器模型,進行數值仿真,最終得到PID控制規則的表值.由于誤差變化范圍不大,所得到表的規模并不大,僅3個數組,每個數組含25個元素.
3 實驗驗證
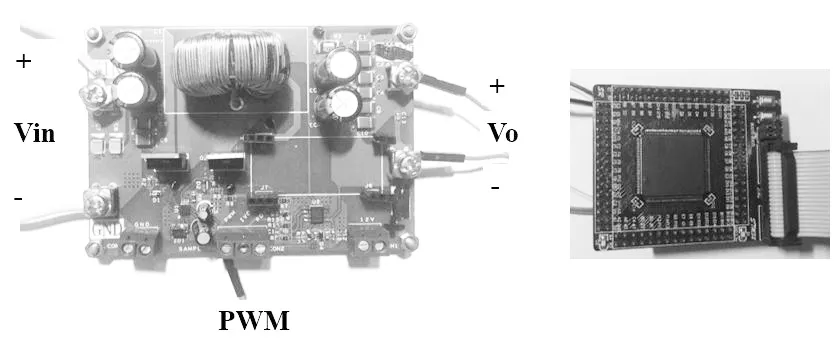
圖3 Buck轉換器功率級以及相應MCU的實驗照片
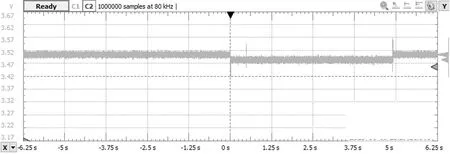
圖4 Buck轉換器的負載從輕載過渡到重載然后重回輕載時輸出電壓的實驗測試圖
圖3所示為Buck轉換器的功率級以及用于控制的MCU的實驗照片.其中,Buck轉換器中的濾波電感L=100 μH,濾波電容C=470 μH,開關頻率fs=41 kHz.MCU采用意法半導體的STM32F407ZET6實現數字控制部分,MCU用來實現數字控制器的ADC、PID與DAC部分.在這里,ADC位數設為8位,DPWM的時鐘頻率被設置為42 MHz.MCU中定時器采用向上計數模式,在每次更新中斷時使用ADC對轉換器的輸出電壓分別進行一次采樣和查表操作,從而更新占空比,反饋控制輸出電壓.
圖4為負載從輕載過渡到重載然后重回輕載時Buck轉換器輸出電壓的實驗測試圖.可以看到,在輕載時,輸出電壓為3.5 V,當在圖4所示的0 s時刻,負載突然被加載,輸出電壓下降至3.48左右,并馬上穩定,在5s時刻,負載被突然卸載,輸出電壓重回到3.5 V.運行結果驗證了PID查表控制Buck轉換器的可行性.
4 結論
文中以PID控制的Buck轉換器為例給出了一種低功耗低成本的數字化查表控制方法.該方法在考慮ADC與DAC對Buck轉換器性能影響的基礎上,通過建模,分析系統環路,預先計算控制規則得到的值,并將值預先儲存于RAM表中,依據實際運行過程中轉換器輸出電壓與參考電壓的誤差量進行查表,通過反饋,穩定轉換器的輸出電壓.文中以Buck轉換器為例實現了PID查表控制,驗證了該方法的可行性.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19