
電廠輸煤皮帶機集控技術的探索
2019-11-30 12:05:31張玉瑩
科技資訊 2019年26期
關鍵詞:皮帶機
張玉瑩
摘? 要:該文介紹了皮帶機集控的研究目的及其控制系統的組成、工作原理、主要功能、控制要求、使用效果,其中詳細介紹了控制系統設備層、控制層、管理層的組成,各種方式下的保護功能,重點闡述集控方式下多部皮帶機的閉鎖啟停順序,及各種保護動作情況下皮帶機的聯鎖停機、每部皮帶機的輔機與主機閉鎖啟停順序、控制層與管理層(上位機)的以太網通訊、組成軟件等,從皮帶機集控應用效果、技術先進性說明了項目的推廣應用價值。
關鍵詞:皮帶機? 集控技術? 工作原理及功能? 控制要求
中圖分類號:TM621 ? ?文獻標識碼:A 文章編號:1672-3791(2019)09(b)-0040-03
Abstract: This paper presents the research purpose of belt conveyor control and its control system composition, working principle, main functions, control requirements and use effects. The details of the control system equipment layer, control layer and management layer are introduced in detail. This paper emphatically expound the sequence of interlocking start-stop of multi-belt conveyors under centralized control mode, interlocking stop of belt conveyors under various protective actions, the sequence of start-stop of auxiliary and main engine of each belt conveyor, Ethernet communication between control layer and management layer (upper monitor), and software composition. The application value of the Technology is illustrated from the application effect of centralized control of belt conveyor and the advanced technology.
Key Words: Belt conveyor; Centralized control technology; Working principle and function; Control requirements
電廠輸煤皮帶運輸系統的設備分布廣、保護多、監測監控元件多,信息的傳輸及控制要求高,傳統的皮帶機采用人工控制,每部皮帶機均需要一個皮帶機司機,占用人員多,多部皮帶機連續運輸時,當下部皮帶機發生故障,需電話聯系上部帶司機停機,造成上部皮帶不能及時停機,往往造成皮帶機尾堆煤事故,不利用電廠的安全高效發展[1-2],為此,研究皮帶機集中控制技術。
1? 控制系統的結構與組成
本控制系統采用“遠程集中控制為主,現場就地操作為輔”的控制方式,系統的硬件結構分為管理層(上位機)、控制層(PLC控制室)和現場設備層三層網絡控制體系。其中,各類傳感器及保護裝置、PLC控制站、上位機分別為設備層、控制層、管理層的功能核心[3]。
1.1 設備層
設備層包括各類保護開關、傳感器及執行設備,主要針對皮帶機的運行狀態、故障現象進行參數采集及狀態反應,將系統各部皮帶的啟停、拉繩動作、撕裂故障、跑偏故障、打滑故障、溫度、語音報警、聲光顯現等進行保護或狀態的顯示,并實時傳輸至控制層、管理層[3]。傳感器有減速機潤滑油壓壓差變送器、主電機定子溫度及軸承溫度傳感器、減速機軸承溫度及油溫傳感器,保護開關包括二級跑偏開關、縱向撕裂保護開關、雙向拉繩開關、欠速開關、主電機開關柜的電流保護等[4]。
1.2 控制層
控制層主要以PLC為核心,由控制主站、控制分站、防爆就地控制箱組成。控制層利用PLC的數據處理能力,將各傳感器采集的現場數據進行邏輯運算及處理、信息轉換、指令發送,通過程序指令進行條件判斷,為管理層提供故障保護、人機界面現場數據顯示、現場設備控制以及工藝流程顯現,該部分為遠程集中控制的關鍵[5]。
控制層包括PLC控制主站與分站、下位機、就地控制箱、光電轉換開關、皮帶機變頻器、阻燃電纜、礦用光纖、光電轉換器、擴音電話、各類傳感器、保護開關和礦用攝像儀等設備組成,主要監控皮帶煤流運輸系統的所有設備[5]。正常生產時根據實際情況既可在集控室遠程操作(有操作權限),也可在現場就地操作設備。
1.3 管理層
管理層包括上位機、光電轉換開關、光纖、礦用網絡交換機,并通過上位機實時監控整個運輸系統、顯示所有設備的運行狀態、保護元器件運行參數,便于疾控人員下達控制指令,通過人機界面現場修改工藝流程、設定參數,進行多部皮帶機的管理、數據存儲及更新、數據庫資源的共享,從而實現與整個電廠自動化系統的網絡連接與通信[5]。
2? 控制系統的工作原理及功能
2.1 工作原理
控制系統通過檢測技術、自動化技術、工業控制技術、網絡通信技術、計算機等實現對皮帶機運輸系統各種設備的保護。利用傳感器、保護開關現場采集皮帶機撕裂、跑偏、拉繩、溫度等等參數,并通過工業控制總線通信技術傳輸到PLC控制中心進行數據處理,通過工業以太網將處理好的數據利用組態軟件處理后成圖像及表格等形式上傳至上位機,便于集控員掌握皮帶機的運行情況,及時操作與控制。集控員下達的控制指令,又逆向傳輸,即通過上位機—PLC—現場設備的順序,實現對設備的控制,完成皮帶集控系統的實時監測、集中控制、聯鎖啟停[3]。
2.2 系統的主要功能
2.2.1 保護功能
皮帶機集控系統通過上位機、下位機的顯示屏顯示現場工作環境溫度、皮帶速度等參數,并對大功率皮帶機進行變頻調速運行。當傳感器、保護裝置的模擬量輸出信號發生變化時,如皮帶打滑、跑偏、電機或減速箱溫度過高等開關量、模擬量出現異常時,集控系統發出報警信號,在下位機、上位機顯示相應的故障類型和地址,皮帶機故障達到一級狀態,發出預警,警示集控員觀察設備運行參數的變化,以防事故發生。
在皮帶發生二級跑偏、撕裂等嚴重故障時,系統斷電停車;在發生皮帶欠速到85%故障時,可編程控制器啟動液壓漲緊裝置對皮帶進行漲緊處理。若故障繼續惡化,PLC根據故障參數進行條件判定后停車,并將故障類型、發生地址等信息傳輸至上位機。另外,集控員或現場巡檢員還可以通過手動控制,對系統的皮帶機及輔機進行斷電停機。
2.2.2 皮帶機保護開關的分布及動作情況
(1)拉繩開關:安裝在皮帶道行人側的皮帶機架上,當沿線皮帶機發生各類意外故障時,皮帶機巡檢人員可就地拉動拉繩急停開關,使皮帶機停機。只有拉繩開關復位后,皮帶機方可重新啟動。
(2)二級跑偏開關:安裝在帶式輸送機頭、機尾等容易發生跑偏的部位,當輸送帶跑偏時,二級跑偏開關通過線纜向PLC發送跑偏信號,保護系統設置一級跑偏報警,二級跑偏皮帶機斷電停機功能,當跑偏達到一級跑偏或者二級跑偏設定值時PLC分別發送不同的信號指令。
(3)電動機表面溫度傳感器:安裝在驅動主電動機機身及軸承端蓋內,用于測量電動機定子繞組表面溫度及軸承溫度,間接反映定子繞組溫度、軸承溫度,當溫度超過預定值時發出報警[6]。
(4)減速機軸承及油溫傳感器:軸承溫度傳感器安裝在減速機軸承內端蓋內,油溫傳感器安裝在油池內,分別用于測量減速機軸承溫度及減速機油溫,當溫度超過預定值時發出報警。
(5)欠速打滑開關:安裝在皮帶機頭,當皮帶機速度為正常值的85%時報警,欠速打滑計時30s發出調節液壓漲緊裝置信號,當欠速1min欠速打滑未消失時報警停機。
(6)縱向撕裂保護開關:安裝在皮帶機的中間位置,橫跨與皮帶,當檢測到皮帶縱向撕裂信號后發出報警信號并立即停機。
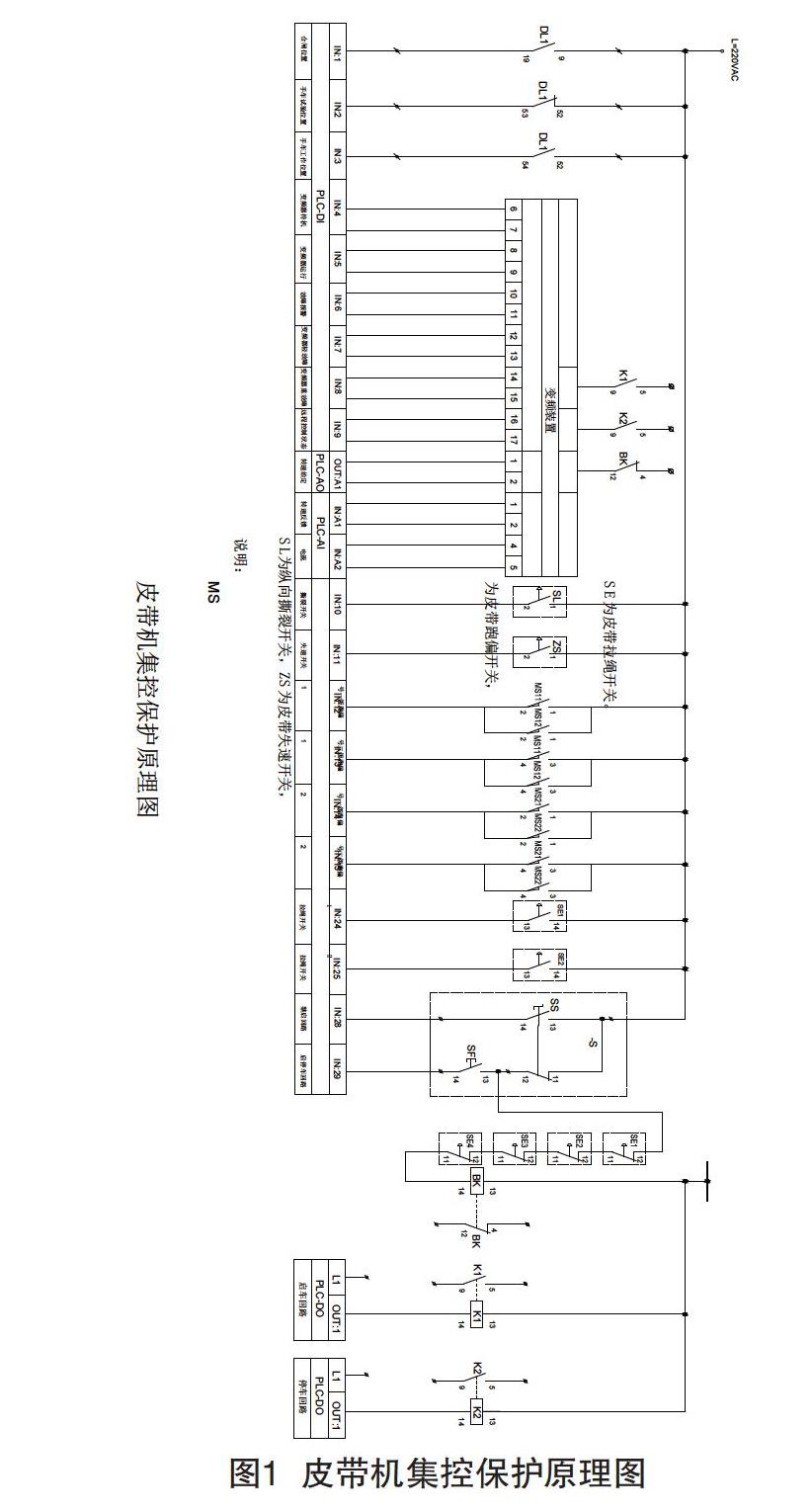
皮帶機集控保護原理圖如圖1所示。
2.2.3 信息采集與處理功能
包括采集或執行各種開關量信號及模擬量信號,具體為:
(1)開關量輸入模塊:AB-1756系列PLC開關量輸入模塊及擴展模塊,采集皮帶機各種開關量狀態參數。
(2)開關量輸出模塊:AB-1756系列PLC開關量輸出模塊及擴展模塊,通過西門子CPU邏輯運算,向皮帶機輸出開關量控制信號。
(3)模擬量輸入:AB-1756系列PLC模擬量輸入模塊及擴展模塊,采集皮帶機各種模擬量運行參數。
(4)模擬量輸出:AB-1756系列PLC模擬量輸出模塊及擴展,根據皮帶機各種設備的運行要求設定如溫度等各種模擬量參數。
2.2.4 通訊網絡構架
根據電廠煤流運輸系統的實際情況,網絡架構中以滿足通訊信息為前提,同時兼有系統的先進性、安全性、可靠性,構建工業以太網的通信平臺,利用PLC控制器,并輔以工業以太網圖像監視[7],實現皮帶機電控系統的遠程集中監測監控。
為保證系統通訊信息的正常傳輸和數據的可靠性,采用工業以太環網交換機,可方便將各種底層設備、通信系統、現場數據總線等系統地接入主干網絡。
3? 皮帶機控制要求
3.1 控制模式
控制系統具有就地、集控、檢修三中工作模式,通過集控室操作臺上的轉換開關實現各種控制方式。正常情況在集控模式下運行,集控系統根據前后設備閉鎖關系自動啟停,同時檢測各種監測數據,當監測數據異常時及時報警或報警并停機。就地模式運行時,一般是在集控系統故障情況下,集控員將皮帶機的聯鎖解除,皮帶機司機手動操作按鈕啟動/停止皮帶機,該種情況下,皮帶機之間、皮帶機與輔機之間均不能實現閉鎖啟停。檢修模式運行時,皮帶機司機手動操作按鈕啟動/停止皮帶機,檢查皮帶機單機運行狀況。皮帶機運行過程中,不能改變其工作方式。
3.2 集控模式
集控狀態下,報警停機等故障信號自動保持,即一旦發出故障信號,即使維修后故障信號消失,微機內仍保留信號故障記錄[8],按動復位指令可以清除故障記錄。正常情況下,皮帶機按逆煤流啟動、順煤流延時停機,并具有閉鎖功能。該方式下,皮帶機監測系統將監測到的狀態信號傳遞到集中控制層的PLC控制系統,由PLC發出皮帶機主電機啟動指令后,啟動皮帶機。運行中的皮帶機在以下任何一種情況下:皮帶機電流異常動作、拉繩開關動作或欠速85%及以下持續一分鐘、防撕裂開關動作、跑偏開關二級保護動作時(一級報警,二級動作),監測信號傳遞到PLC控制柜,進行數據處理,并發出皮帶機立即停機指令。
皮帶機運輸系統的閉鎖控制啟停順序:多部皮帶機之間的啟停順序:逆煤流啟動、順煤流停止;任何一部皮帶機故障急停時,該部皮帶機停機,上部皮帶機及上上部皮帶機立即停機。
4? 使用效果
電廠輸煤皮帶機集控技術的探索應用,避免了傳統的每人操作一部皮帶機時人員誤操作造成的皮帶機輔機未啟動、啟動皮帶機主電機而損壞設備,皮帶機的聯鎖啟停避免了下部皮帶機急停時上部皮帶機繼續運行造成的皮帶機尾堆煤現象,減少了人工清理皮帶道的人工。該技術實施后,能夠根據上位機顯示的皮帶機故障現象準確判斷故障點,有利于及時處理皮帶機的各類事故,減少了皮帶機巡檢人員,該技術先進,提高了多部皮帶機生產安全可靠性,具有一定的推廣應用價值。
5? 結語
電廠輸煤皮帶機遠程集控技術的探索實踐實現了電廠三部皮帶機的聯鎖啟停,現場數據采集準確、PLC控制系統相應靈敏、保護完善,該系統架構采用控制網冗余通訊網絡[9],火車裝車煤流運輸系統的集控系統可與公司生產控制系統通過工業以太網進行通訊,實現各類信息集成與電廠實現信息聯通、共享,為電廠實現綜合自動化、信息化創造條件。
參考文獻
[1] 林洋.一種長距離帶式輸送機控制系統的設計與應用[J].煤礦機電,2012(2):52-54.
[2] 尹衛兵,都勤勤.煤礦井下膠帶機輸送自動控制系統設計與應用分析[J].山東煤炭科技,2015(10):112-113.
[3] 馮世剛.煤礦皮帶運輸集控系統的設計[D].重慶大學,2013.
[4] 李海路.600MW等級機組運煤系統設計[D].華北電力大學(保定),2014.
[5] 徐紅星.試述皮帶機綜保集控系統的功能設計與運用[J].建筑工程技術與設計,2014(5):71.
[6] 張烜,段炎杰.基于工業以太網的帶式輸送機集控系統研究與設計[J].煤礦機電,2013(1):37-40.
[7] 陳倩蕓,鄧克勇,李志俊.基于PLC冗余技術的皮帶機控制系統設計與實現[J].工程建設與設計,2018(10):120-124.
[8] 田實宇.膠帶輸送機PLC集中控制系統的應用研究[J].城市建設理論研究:電子版,2012(19):1.
[9] 馬榮輝.自動化控制系統在躍進選煤廠的應用[J].數碼設計,2018(2):91-93 .
猜你喜歡
機械管理開發(2022年1期)2022-03-24 06:46:28
防爆電機(2021年6期)2022-01-17 02:40:28
裝備制造技術(2020年9期)2021-01-26 00:15:12
山東煤炭科技(2020年8期)2020-09-02 04:03:36
機械管理開發(2020年12期)2020-04-12 15:12:48
河南建材(2017年4期)2017-08-16 02:53:20
山東工業技術(2015年5期)2015-07-26 07:20:21
同煤科技(2015年2期)2015-02-28 16:59:14
河南科技(2014年23期)2014-02-27 14:18:55
河南科技(2014年6期)2014-02-27 14:06:33
