基于PLC與MCGS組態(tài)軟件的電力拖動(dòng)仿真實(shí)訓(xùn)系統(tǒng)的研究
2019-12-06 06:26:44王琳輝
內(nèi)蒙古教育·科研版
2019年9期
王琳輝
摘 要:本文重點(diǎn)介紹了中高職學(xué)校電力拖動(dòng)控制線路課程仿真實(shí)訓(xùn)系統(tǒng)。采用PLC和嵌入式MCGS組態(tài)軟件,可以通過(guò)電腦動(dòng)畫(huà)仿真與實(shí)際線路聯(lián)動(dòng)來(lái)模擬電力拖動(dòng)實(shí)訓(xùn)項(xiàng)目。與傳統(tǒng)實(shí)訓(xùn)仿真相比,虛實(shí)結(jié)合、方便可靠、省時(shí)省力、效果逼真、界面友好。方便學(xué)生學(xué)習(xí)和掌握電力拖動(dòng)控制線路的原理和安裝。
關(guān)鍵詞:PLC;MCGS;組態(tài)軟件;電力拖動(dòng);仿真實(shí)訓(xùn)
【中圖分類號(hào)】G【文獻(xiàn)標(biāo)識(shí)碼】B【文章編號(hào)】1008-1216(2019)09B-0042-03
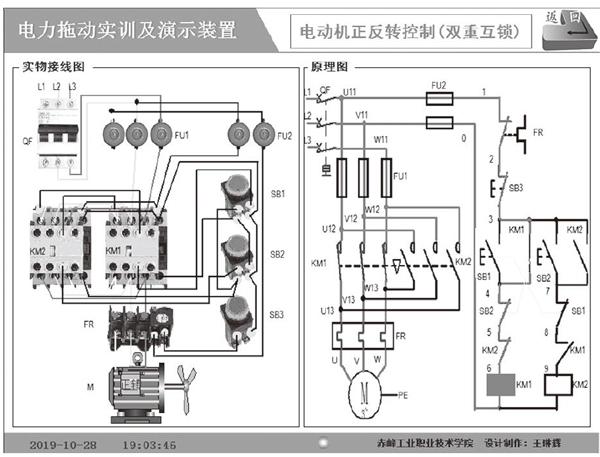
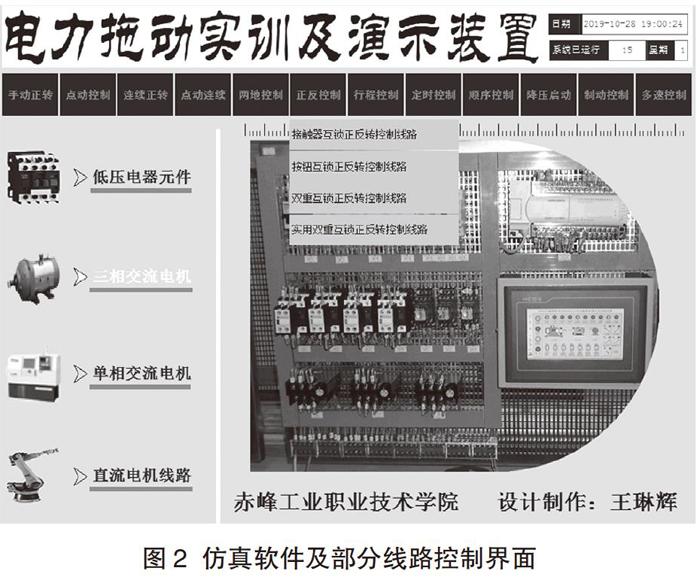
目前,中高職機(jī)電類、電氣類專業(yè)均開(kāi)設(shè)電力拖動(dòng)基本控制線路這門(mén)實(shí)訓(xùn)課。在講授電機(jī)控制線路原理時(shí),教師普遍采用掛圖或黑板畫(huà)圖講授的方式。對(duì)于電路中電流走向,電器元器件的動(dòng)作過(guò)程,學(xué)生很難理解與掌握。根據(jù)教學(xué)實(shí)際情況,在師生中進(jìn)行了廣泛的調(diào)研,利用PLC、觸摸屏和MCGS組態(tài)軟件設(shè)計(jì)開(kāi)發(fā)了電力拖動(dòng)實(shí)訓(xùn)及演示系統(tǒng)。該系統(tǒng)由上位機(jī)仿真軟件、下位機(jī)控制部分和實(shí)訓(xùn)設(shè)備本體組成。上位機(jī)采用MCGS組態(tài)軟件設(shè)計(jì)了所有電力拖動(dòng)控制線路仿真動(dòng)畫(huà),下位機(jī)采用PLC、觸摸屏、接觸器制作了電力拖動(dòng)控制線路實(shí)訓(xùn)及演示裝置。采用串口或以太網(wǎng)通訊把上位機(jī)與下位機(jī)連接起來(lái),從而實(shí)現(xiàn)用電腦控制實(shí)訓(xùn)裝置動(dòng)作,并保證電腦中電力拖動(dòng)控制線路動(dòng)畫(huà)與實(shí)訓(xùn)裝置中電機(jī)動(dòng)作過(guò)程聯(lián)動(dòng),達(dá)到理實(shí)一體、“學(xué)中做,做中學(xué)”的目標(biāo)。
一、系統(tǒng)總體設(shè)計(jì)
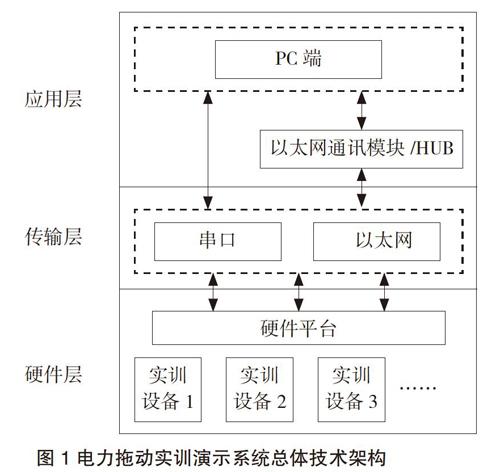
根據(jù)研究的設(shè)計(jì)要求,本文所研究的電力拖動(dòng)實(shí)訓(xùn)演示系統(tǒng)總體技術(shù)架構(gòu)如圖1所示。
該系統(tǒng)硬件層包括PLC與人機(jī)界面、實(shí)訓(xùn)設(shè)備本體組成的人機(jī)交互式硬件平臺(tái),介于應(yīng)用層和硬件層之間的傳輸層用于實(shí)現(xiàn)二者的信息交互和數(shù)據(jù)傳輸,主要有串口轉(zhuǎn)RS485通訊、以太網(wǎng)通訊。……
登錄APP查看全文
