基于新型微控制器的空氣凈化器驅動電機控制系統設計
2019-12-09 01:48:30朱清祥何舟長江大學電子信息學院湖北荊州434023
長江大學學報(自科版) 2019年12期
關鍵詞:信號
朱清祥,何舟 (長江大學電子信息學院,湖北 荊州 434023)
空氣凈化器電機驅動系統作為空氣凈化器最核心的部件,扮演著相當重要的角色,其性能的優劣直接決定著風力的大小、凈化效果,還會影響機器的噪音和振動等。因此,驅動電機的控制性能對于空氣凈化器的效果和性能有著重要的影響[1]。針對空氣凈化器實際運行工況,筆者采用美國微芯公司的高性能低功耗控制芯片dsPIC30F4011,東芝公司的驅動電路智能功率模塊,設計了一套軟硬件控制系統。
1 控制系統總體結構

圖1 空氣凈化器驅動電機控制系統總體結構
所設計的驅動電機控制系統總體結構如圖1所示。
控制系統包括硬件和軟件2個部分:硬件部分包括控制電路、驅動電路及電壓、電流采樣電路;軟件設計采用無位置傳感器換相控制算法。
控制器采用美國微芯公司的高性價比dsPIC系列芯片dsPIC30F4011作為主控芯片,該控制芯片是一種具有數字信號處理器(DSP)運算功能的電機專用數字信號控制器(DSC),芯片卓越的性能及合理的配置為設計不同精度、不同轉速范圍、不同控制策略的電機控制提供了理想的低成本解決方案[2]。
在驅動電機的起動階段,主控芯片負責轉子的初始位置確定及加速起動控制;在驅動電機的同步運行階段,主控芯片負責對反電動勢的過零點進行辨識以獲取電機轉子的實時位置并對電機的轉速進行估算以實現延時換相及電機轉速的實時控制等[3]。
圖2展示了主控芯片的引腳分配。其中,VDD為主控芯片的供電電壓(5V);PGC為在線串行編程時鐘輸入信號;PGD為在線串行編程數據輸入/輸出信號;TX為異步接收器/發送器通信模塊的發送信號;RX為異步接收器/發送器通信模塊的接收信號;HIN1/LIN1到HIN3/LIN3為三相六路PWM輸出信號;I_DC為經放大后的直流母線電流采樣信號;VSP為用于給定轉速的外接電位器的電壓信號;FG為驅動電機的轉速輸出信號;VM1、VM2、VM3為分壓后的A、B、C三相端電壓信號;OSC1為外部晶振輸入;OSC2為外部晶振輸出信號;為方便對所設計的控制系統進行測試和調試,S1和S2為設計的按鍵輸入信號;為對控制系統進行保護,FLTA為系統的故障信號輸入。
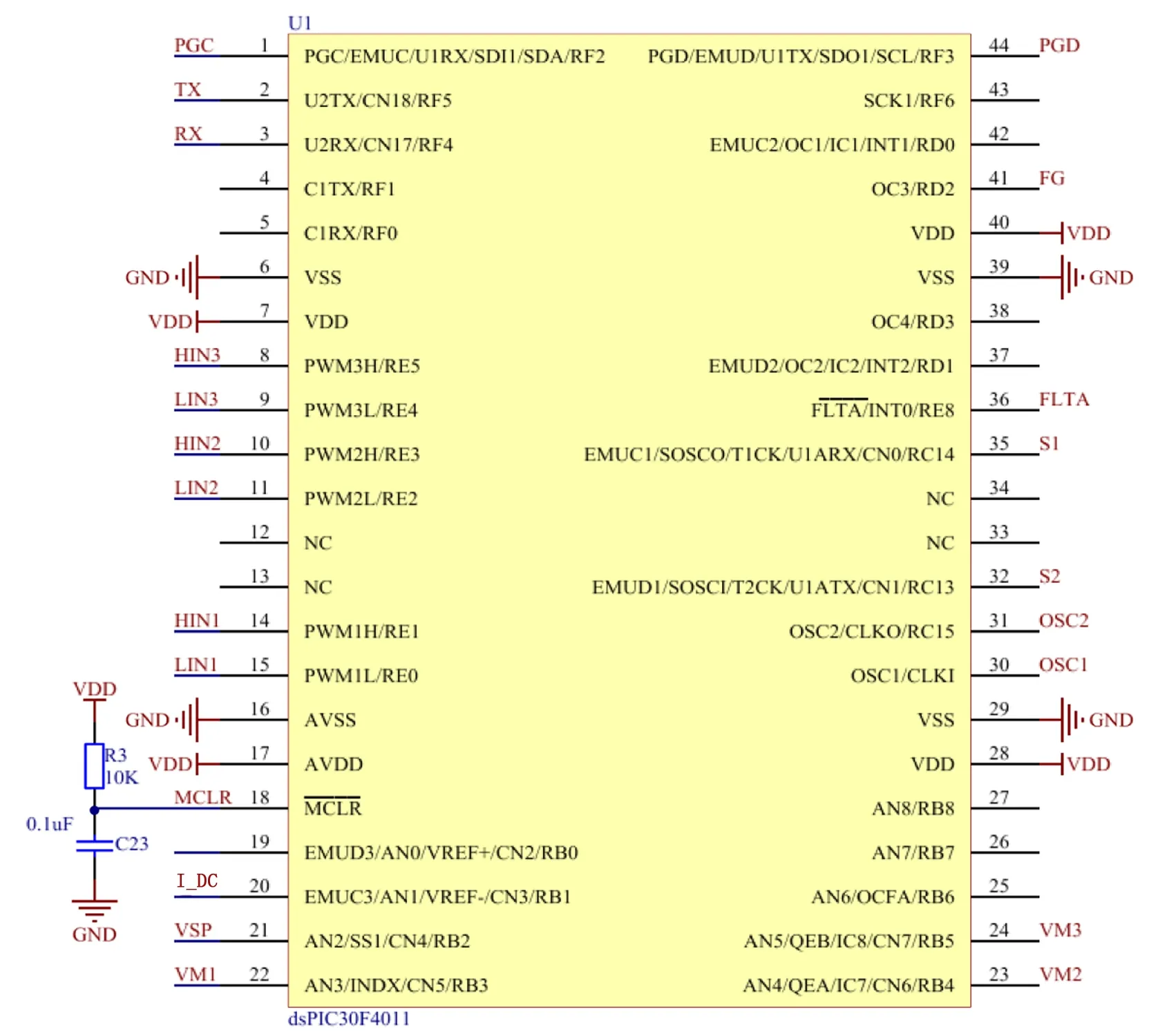
圖2 主控芯片引腳分配圖
2 硬件電路設計
2.1 智能驅動模塊外圍電路設計
為對主控芯片保護及電氣隔離,主控芯片的引腳與電力電子功率開關器件不應有電氣聯系,控制系統往往需要專門的驅動電路對電力電子功率管進行隔離驅動[4]。TPD4135K包含的驅動部分由輸入邏輯部分、高側電平轉換驅動器和低側驅動器組成,可以將主控芯片輸出的PWM進行電平變換,用以驅動TGBT。TPD4135K雖然包含過電流保護和故障信號輸出功能,但是需要外圍電路輔助實現這些功能,所設計的驅動電路如圖3所示。
在圖3中,C17、C18、C19為自舉電容,當下橋臂電力電子功率開關管導通時,VCC電源通過二極管對自舉電容充電,使電容很快達到電源的電壓(忽略二極管壓降);下橋臂電力電子功率開關管關斷時,電容兩端電壓不變,可向上橋臂電力電子功率開關管提供偏移電壓,使其導通;R8為對母線電流進行檢測的精密電阻,通過串聯電阻對母線電流進行采樣后可以送入TPD4135K中實現過電流保護,經過放大電路后可以送入主控芯片中實現電流閉環控制,提高了系統的安全性與穩點性[5]。

圖3 智能驅動模塊及外圍電路設計

圖4 母線電流隔離放大電路

圖5 端電壓采樣電路
2.2 母線電流隔離放大電路設計
在圖3中,通過電阻R8將母線電流轉換為電壓信號進行采樣,但得到的電壓值較小。因此,設計了放大電路將采樣得到的電壓經過放大后送入主控芯片中以實現電流閉環控制,從保護主控芯片的角度來說,通過放大電路也可以隔離開主控電路與驅動電路的電氣連接。該電路采用低功耗運算放大器LM258為核心器件構成母線電流隔離放大器電路,由于母線電流最高為額定電流的4~7倍,主控芯片的供電電壓為5V,因此,放大倍數選用11倍,滿足系統正常工作時對母線電流的采樣范圍,設計的電路如圖4所示。
2.3 端電壓采樣電路設計
所使用的驅動電機直流供電電壓為40~60V,而主控芯片的供電電壓為5V,因此,對端電壓采樣需要進行等比例降壓變換,最為方便的方法是采用電阻網絡分壓[7]。采樣電路采用純電阻組成的分壓網絡,采用擇多函數對反電動勢過零點進行辨識,這樣可以避免相移的問題,端電壓采樣電路如圖5所示。其中,W為端電壓,R10和R11組成純電阻分壓網絡,VM1為分壓后的端電壓信號,送入主控芯片中用于反電動勢過零點檢測[6]。
3 控制系統的軟件設計
3.1 主程序與起動流程圖
所使用的驅動電機沒有裝配位置傳感器,在電機的起動階段,由于電機靜止或轉速較低,反電動勢沒有或較小,難以被控制系統檢測到,為解決該問題,采用三段式起動控制算法以實現電機的平穩起步[8~10]。
當控制系統接收到電機起動指令后,執行三段式起動算法:①導通設定的繞組,繞組導通一定的時間后即可實現轉子永磁鐵的預定位;②需要實現外同步加速,通過定時器確定導通繞組時間,在定時器結束后即可按順序切換導通繞組,隨著轉子的旋轉調節占空比與定時時間即可實現升壓升頻的外同步加速;③當電機到達一定的轉速后即可以切換至自同步運行。具體軟件設計流程圖如圖6所示。
3.2 驅動電機在無位置傳感器下的換相算法
電機的換相部分通過芯片的ADC模塊完成對三相端電壓的采集,對導通相電壓之和與非導通相電壓的2倍進行比較,再由PWM中斷利用擇多函數進行反電勢過零點的判別,若判別結果為真,則計算30°電角度時間并啟動定時器進行換相,由于反電勢過零檢測采用擇多函數進行判別,執行程序耗費了一定的時間,需要進行補償,換相流程如圖7所示。

圖6 主程序與起動流程圖 圖7 無位置換相流程圖
4 試驗測試結果
將供電電壓設置為40V時,電機轉速為400rpm,得到電機運行時的線電壓波形如圖8所示。從圖8中可以看出,線電壓波形清晰沒有發生畸變,電機運行穩定。
將供電電壓設置為60V時,電機轉速為600rpm,得到電機運行時的相電壓波形如圖9所示。從圖9中可以看出,相電壓呈現辨析度極高的梯形波,且波形沒有發生畸變,電機運行穩定。

圖8 40V供電電壓下電機運行的線電壓波形 圖9 60V供電電壓下電機運行的相電壓波形
5 結語
筆者針對無位置傳感器電機控制系統的難點進行研究,提出了一種改進的反電動勢過零點檢測方法,并結合主控芯片dsPIC30F4011與驅動芯片TPD4135K的特性,設計開發了一套結構簡單,穩定性能高的控制系統。經在搭建的試驗平臺上進行測試,結果表明系統可以在無位置傳感器的條件下驅動電機正常起動并運行,且運行平穩。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06