基于多傳感器數據融合的四旋翼飛行器位置估計
2019-12-30 01:51:52甘智高李棟
中國科技縱橫 2019年21期
關鍵詞:多傳感器
甘智高 李棟
摘 要:四旋翼飛行器位置估計是對其控制與決策的基礎,研究四旋翼飛行器位置估計問題具有重要意義。通常四旋翼位置估計主要依賴于加速度計,氣壓計以及全球定位系統GPS等。但由于大多數傳感器在測量時存在噪聲和冗余問題,同時單一的傳感器信號也往往無法直接應用于四旋翼的位置估計。因此把多類傳感器的信號融合起來對飛行器進行位置估計是非常有必要的,可以提高其位置估計的精確性和魯棒性。本文從傳感器的測量模型出發,利用加速度計、氣壓計、GPS三類傳感器分別對位置進行估計。利用多種類型傳感器進行測量,融合多個傳感器的數據,從而對四旋翼進行更為精準的位置估計。
關鍵詞:四旋翼飛行器;多傳感器;信息融合;位置估計
中圖分類號:TP273 文獻標識碼:A 文章編號:1671-2064(2019)21-0076-02
0 引言
四旋翼飛行器是近年來發展起來的一門新興綜合技術,在軍事、科研和工業中有著十分廣闊的應用前景。目前,四旋翼無人機以其驅動力高,靈活性強以及適用場合廣的特點廣泛應用于各個領域。它可以代替人去執行一些相對難度較高,危險度較大的任務。順利地執行這些任務的前提是要精確的估計出四旋翼飛行器的位置,從而對其進行有效的控制。由于單一傳感器的數據對四旋翼位置進行估計其精確性很難得到保證,因此對基于多傳感器數據融合的四旋翼位置估計的研究具有廣泛的實用意義。
1 多傳感器數據融合技術概述
多傳感器數據融合是20世紀70年代以來形成的一門新興邊緣學科。在軍事、國防、航天等高科技領域有著廣泛的應用,目前已成為備受人們關注的熱門領域。數據融合技術是將來自多個傳感器的測量數據及相關數據庫的有關信息進行聯合、相關、組合以獲得比任一單個傳感器數據更加全面、具有更高可靠度的數據信息。
2 單傳感器位置估計存在的問題分析
四旋翼傳感器如人身上的器官,能夠提供必要的信息。為了降低四旋翼的成本,企業大多選擇精度較低的廉價的傳感器。這些傳感器雖然也能夠直接測量加速度、角速度等。但都存在很大的測量噪聲,一方面有些信息無法直接測量到,比如速度、姿態角、障礙物、位置等,它們需要另外估計出來。另外一方面,傳感器的信息存在著冗余。
對于四旋翼飛行器而言,準確的外界信息和自身狀態信息,往往不是由單一的傳感器獲得的,而是由多個不同類型的傳感器進行數據融合所得到的。多個傳感器信號的融合對于四旋翼飛行器非常重要,它在很大程度上決定了四旋翼飛行器的智能化水平。
3 各類傳感器位置估計測量的技術原理
3.1 氣壓計
(1)基本原理:四旋翼多采用壓電式氣壓計,氣壓計是一種壓力傳感器。新一代的氣壓計既可以測量氣壓和高度,又可以測量溫度。大氣壓隨高度的增加而減小,氣壓計正是通過測量大氣壓來估計高度。因為大氣壓分布不是均勻的,而且氣壓計對氣流的影響很敏感,所以氣壓計在有風的情況下經常測量不準。因此氣壓計只能夠得到飛行高度的近似值。
(2)校正:因為氣壓計測量的微小變化不會對飛行器造成很大的性能下降。因此這些傳感器產生的偏差可以通過多旋翼飛行在線進行校正。
(3)測量模型:氣壓計用于測量絕對高度,進一步可以得到相對高度。
氣壓計測量的高度與真實高度之間的關系:測量的高度=真實的高度+漂移+白噪聲。
(4)特點:最大采樣頻率較小,數據更新較慢,原始數據輸出噪聲較大。
3.2 全球定位系統GPS
(1)全球定位系統GPS的基本原理:全球定位系統由若干顆衛星組成,位置已知。其基本原理是利用測GPS接收機到衛星的距離,然后通過解方程確定GPS接收機的位置。
用GPS對位置進行估計會存在不同的偽距誤差。對C/A碼測得的偽距稱為C/A碼偽距,精度約為20米左右,對P碼測得的偽距稱為P碼偽距,精度約為2米左右。考慮電離層、對流層和鐘差影響,偽距定位基本觀測方程為:ρ=ρ+c(δt+δT+δI)。
ρ:表示接收機到衛星之間的距離;
ρ:偽距;
c:光速;
δt:衛星導航給出的衛星時鐘差;
δT:接收機鐘差;
δI:大氣中信號累積誤差;
衛星坐標:Ps,k∈R3,k=1,…,ns(表示有ns顆衛星);
用戶接收機位置坐標:Pr∈R3;
(2)差分GPS的基本原理:差分GPS主要是通過消除誤差公共項來改善定位性能。差分GPS系統由基準站、數據鏈和用戶三部分構成。它要求有高質量的GPS基準接收機放在已知坐標的基準站上,基準站估算每個衛星的測距誤差分量,并對每顆衛星可視范圍內的衛星形成校正值,將該校正值通過數據鏈發送給所有的GPS用戶。利用這些校正數據最后來校正自己的位置值,從而得到更加精確的位置定位信息。
(3)GPS的測量模型:GPS接收機放在多旋翼飛行器上,用于測量在地球固連坐標系的位置P∈R3。它可以表示為PGPS=P+bp+np。
PGPS:測量位置信號;
P:真實位置信號;
bp:漂移;
np:噪聲;
一般的GPS和差分GPS都可以采用上面的模型,不同的是它們的精度和頻率不同,體現在漂移和噪聲參數上。
(4)GPS特點:最大采樣頻率較小,數據更新較慢,原始數據輸出噪聲較大。
3.3 三軸加速度計
(1)基本原理:
三軸加速度計是一種慣性傳感器,能夠測量物體的比力,即去掉重力后的整體加速度或者是單位質量上作用的非引力。當加速度計保持靜止時,加速度計能夠感知重力加速度,此時整體加速度為零。在自由落體運動中,整體加速度就是重力加速度,但加速度計內部處于失重狀態,此時三軸加速度計輸出為零。
(2)加速度計的校正:
一般校正:需要外部標定設備,精確度很高但比較麻煩。
自動校正:不需要外部標定設備,比較簡單但精度度略差。
(3)加速度計的測量模型:
加速度計固聯在機體軸上,測量的是三個機體軸方向上的比力,記為am∈R3,可以表示為=+ba+na。
:校正后測量的比力;
:真實的比力;
ba:漂移;
na:高斯白噪聲;
(4)加速度計的特點:抗干擾性好,采樣頻率大,數據更新快,實時性強。
4 多傳感器數據融合的優勢分析
多旋翼在飛行時通過GPS可以獲得當前的位置,聯合氣壓計可以進一步獲得當前更為精確的多旋翼的位置信息。首先定義絕對位置為P=[Px Py Pz]T∈R3。
過程模型可以表示為:=R(-ba-na)+ge3。
觀測模型可以表示為:PxGPS=+;PyGPS=+ 。
dbaro=-++
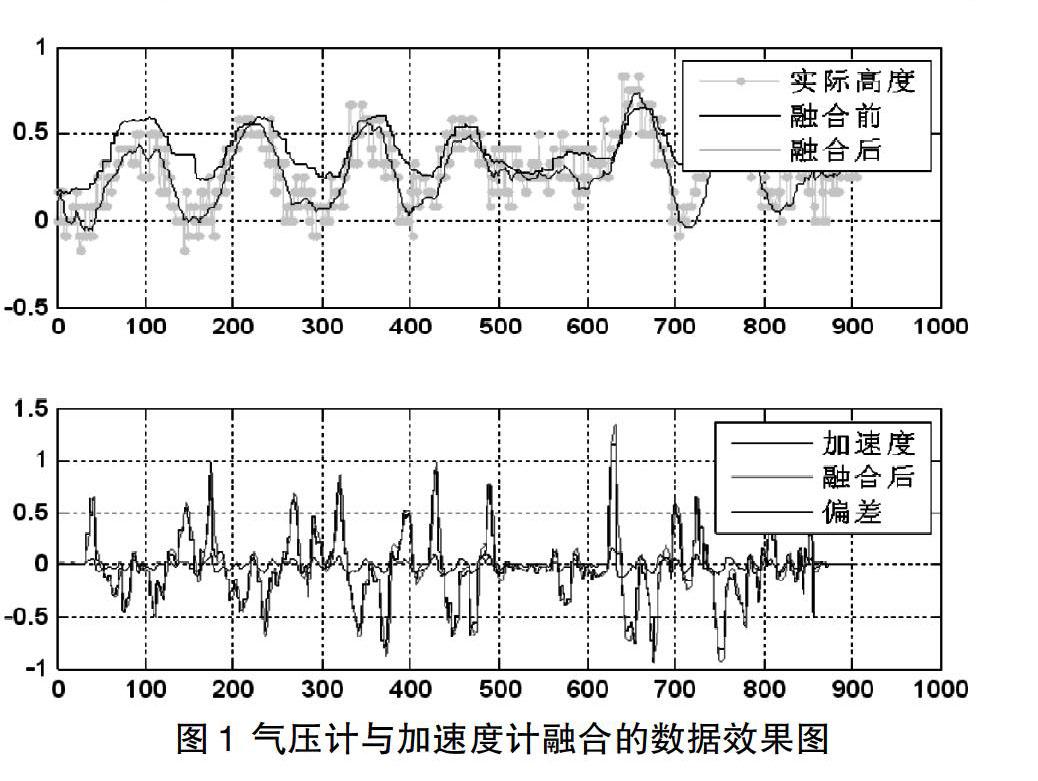
觀測模型中有GPS和氣壓計,其中GPS來觀測的是水平的位置,而氣壓計測量的是豎直方向上的高度。由于氣壓計和GPS數據更新較慢的特點,相對于加速度計會有一定的滯后。所以不能直接用這三個傳感器同一時間的輸出數據進行處理去估計四旋翼飛行器的當前位置。應該先把此刻三軸加速度計輸出的數據保存起來,與下一時刻氣壓計和GPS的輸出數據進行融合,才能更加準確的估計四旋翼的位置。
圖1為氣壓計與加速度計融合的數據效果圖,通過延遲回路算法的處理,減輕了由GPS和氣壓計延遲所帶來的干擾。融合后得到的高度信息更為精確,偏差明顯變小。
5 結語
本文采用多傳感器數據融合對四旋翼飛行器進行位置估計,利用加速度計、氣壓計、GPS三類傳感器對位置信息進行測量。利用GPS與氣壓計數據輸出滯后于加速度計的特點,通過實時GPS與氣壓計的輸出數據與加速度計上一時刻的輸出數據進行數據聯合,從而更為精準的估計四旋翼飛行器的位置。基本原理是利用這些傳感器的信息互補的特性,通過多個傳感器信號的融合對四旋翼飛行器進行更為有效的位置估計。多傳感器數據融合與單傳感器處理相比有很大的優勢。
一方面當某一傳感器無法正常工作時,還能有其他傳感器可以提供相關的信息,提供了飛行器的容錯性,從而生存能力更強。另一方面提高了位置估計的可信度與準確度。
參考文獻
[1] 陳懂,劉瑢,金世俊.智能小車的多傳感器數據融合[J].現代電子技術,2005,28(6):3-5.
[2] 董為浩.基于目標定位的數據融合算法研究[D].杭州電子科技大學,2015.
[3] 全權.詳解機器人基礎入門知識[J].機器人產業,2018(06):71-83.
[4] 黃艷國.基于信息融合的四旋翼飛行器的姿態解算[J].計算機仿真,2018(09):59-64.
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
