基于模式判別的運動學約束輔助空中動基座對準方法
2020-01-07 08:17:40曾慶化劉建業高春雷
中國慣性技術學報 2019年5期
趙 賓,曾慶化,劉建業,高春雷
(1.南京航空航天大學 自動化學院 導航研究中心,南京 210016;2.南京航空航天大學金城學院,南京 211156)
對于采用北斗/SINS組合導航的運載體,如果能充分利用組合導航系統中北斗衛星導航系統的信息對捷聯慣導系統(Strapdown Inertial Navigation System,SINS)進行初始化,則可以減小系統對載體的依賴,實現自主對準。由于載體任務、環境的不同,往往需要在不同的機動下完成初始對準:在低機動情況下,收斂速度較快,但是方位失準角可觀測度較低[1],導致方位失準角的對準精度較低;在高機動情況下,方位失準角可觀測性得到提高,但機動運動同時也會增強系統的非線性,對卡爾曼濾波器的估計效果產生一定的負面影響,對準的快速性和精度受到影響[2]。且在實際戰場中,北斗信號很容易受到干擾,無法保證其信息的有效性。如何綜合提高載機各種機動情況下的對準性能,是亟需解決的問題。
模型輔助導航是一種低成本的 SINS誤差修正方法[3],主要有動力學輔助和運動學約束兩種模式。由于飛機等空中運載體具有大量子系統和強非線性特性,所以建立簡潔實用的動力學模型比較困難。相對來講,運動學約束是SINS誤差控制的常用手段,它通過將飛行器的運動信息與現有的導航系統信息相融合,有效提高導航系統的導航精度與可靠性,無需增加額外的傳感器,具有自主性強、成本低和零載重等優點。
當載體在地面上運動且沒有側滑時,載體側向和垂向速度為 0,稱之為速度約束。國內外學者對速度約束在地面各類載體中的應用進行了大量的研究[4-6]。此外,車載導航的其他運動約束也得到充分研究:文獻[7]建立了適合于四輪車輛的轉彎半徑、前輪擺角、軸距的車輛運動學模型,來輔助車載導航。文獻[8]在常規速度約束的基礎上,建立了轉彎過程中的速度約束,實現了衛星中斷情況下的車輛定位。文獻[9]論述了車輛速度約束以及加速度輸出計算的姿態角約束方法,增強慣性導航系統的性能。文獻[10]利用GPS輸出的水平速度獲得偽航向角作為約束信息,提高航向精度,但僅適用于無側滑角的情況。文獻[11]結合里程計測量信息構建完整速度約束,并提出構建虛擬位置觀測信息的方法,以提高衛星中斷期間的導航精度。綜上可知:目前運動學約束輔助導航的研究多針對載體在地面運動的情況,空中載體的運動學約束尚未見到相關研究的報道。由于氣流角的存在以及空中運動的特點,即使飛機穩態飛行過程中,上述速度約束、轉彎約束、姿態角約束等條件也不再適用。
本文通過對飛機空中運動的狀態進行分析,挖掘系統存在的合理約束,提出一種基于運動學約束輔助的捷聯慣導系統空中動基座初始對準方法。在不增加輔助傳感器的前提下,建立飛機角速度運動學模型,進行運動模式判別,構造虛擬量測方程輔助北斗衛星導航系統進行空中動基座對準。在載體低機動情況下提高動基座對準的精度,在載體高機動情況下提高動基座對準的快速性,滿足各種機動情況下的機載捷聯慣導系統空中對準精度、快速性等綜合需求。
1 基于運動學約束輔助的空中動基座對準方案設計
因此,在空中動基座對準過程中,選擇捷聯慣導系統導航解算得到的速度和北斗衛星導航系統測量得到的速度的差值作為一組量測信息;再建立飛機角速度運動學模型,引入運動模式判別方案判斷運動約束的可用性。在運動約束可用時,將捷聯慣導系統解算的角速度與理想的角速度(近似為 0)的差值作為另一組量測信息。采用兩者結合共同進行量測更新,用卡爾曼濾波器對捷聯慣導系統的失準角進行估計和校準,完成飛機空中動基座對準。基于運動學約束輔助的機載捷聯慣導系統空中動基座對準方案如圖1所示。
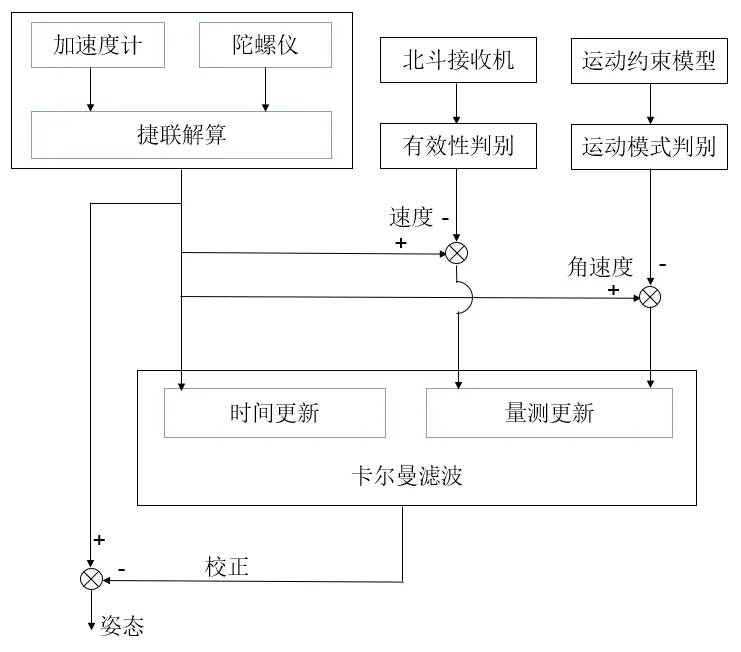
圖1 基于運動學約束模型輔助的捷聯慣導系統空中動基座對準方案框圖Fig.1 In-flight moving-base alignment scheme of SINS based on kinematic constraint model
采用運動模式判別方案檢測到飛機處于非角運動狀態時,即引入角速度約束模型,聯合北斗衛星導航系統信息進行量測更新。當檢測到飛機處于角運動狀態時,即對角速度約束輔助進行隔離,角速度虛擬量測信息不參與濾波器的量測更新,僅由北斗衛星導航系統進行量測更新。在應用中,能夠比較方便地根據可用信息切換組合模式。該方案可以在不增加額外傳感器的前提下,綜合提高北斗衛星導航系統輔助捷聯慣導系統動基座對準的精度和快速性。
由上述方案設計可知,角速度運動約束模型和角運動模式判別是實現本方案的關鍵環節,因此首先對角速度運動學約束模型構建和角運動模式判別方案進行研究。
2 飛機角速度運動學約束模型構建
導航坐標系選取東北天地理坐標系,飛機機體坐標系選取右前上坐標系。在捷聯慣導系統中,角速度表達式如下:


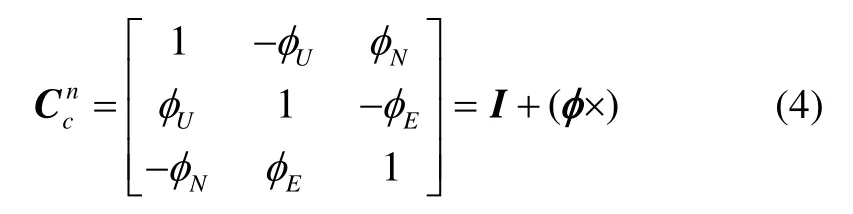
c系和n系之間存在計算誤差,因此代入式(2):
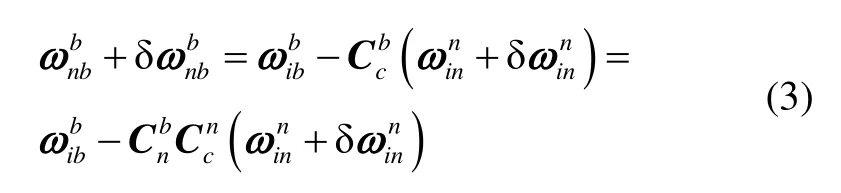
式(3)可展開為:
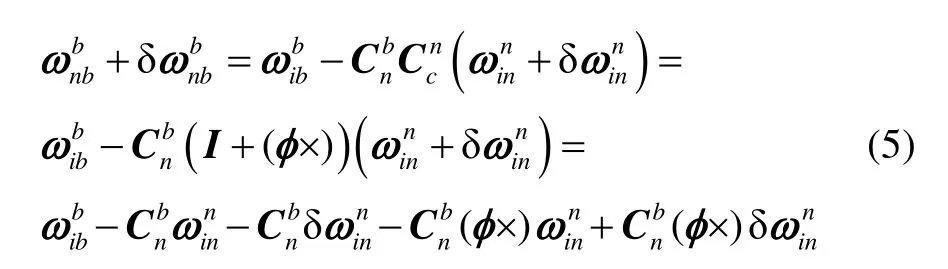

忽略二階小量可得:


由第1節的分析可知:當載體處于非角運動狀態時,地球自轉和載體在地球表面運動所產生的角速度分量量級較小,可認為機體坐標系相對于導航坐標系的角速度近似為零;而捷聯慣導系統導航解算得到的角速度實際值,由于誤差 的存在并不為零。因此,可將機載捷聯慣導系統解算得到的角速度實際值在機體坐標系、、軸上投影作為動基座對準的虛擬量測信息,并將地球自轉和載體在地球表面運動所產生的角速度分量視為量測信息的噪聲信息進行處理。
則可通過式(8)構建運動約束虛擬量測方程,如式(9)所示。
3 基于殘差的角運動模式判別方案
在飛機空中運動過程中,對其角運動模式進行實時的判別,正確控制角速度約束的使用,是本算法應用的關鍵。對運動學約束輔助的空中動基座對準算法進一步分析可知,式(9)中虛擬量測信息是由捷聯慣導系統解算的角速度構成,即角速度值將通過量測信息對濾波器產生影響。從這個角度出發,考慮將系統級故障檢測的思路用于運動約束輔助對準濾波器中,實時檢測虛擬量測信息的有效性。
該設計思想如下:將系統處于角運動的狀態視為非穩態(類比于故障檢測中的故障狀態),將系統處于非角運動的狀態視為穩態(類比于故障檢測中的非故障狀態),通過殘差檢驗法實時判斷系統是否存在穩態。若檢測到有“故障”,則表明系統處于角運動狀態(非穩態),機體坐標系相對于導航坐標系的角速度理想值不再為0。顯然,由載體角運動引起的“故障”將直接造成虛擬量測信息無法表征實際的運動角速度信息,則角速度虛擬量測信息不參與濾波器的量測更新,僅由北斗衛星導航系統進行量測更新。反之,若檢測到“無故障”,則表明系統處于非角運動狀態(穩態),引入角速度約束模型,聯合北斗衛星導航系統信息進行量測更新。

飛機角運動帶來的實際角速度將通過量測殘差向量對濾波器產生很大影響,甚至導致濾波發散。
其方差為:
當飛機處于非角運動狀態時,殘差rω,k較小;當飛機處于角運動狀態時,殘差rω,k急劇增大。因此,通過對殘差rω,k進行檢驗即可判別飛機的角運動狀態,從而確定運動約束是否可用。構建角運動模式檢測函數:

選擇適當的閾值TD,當λω,k<TD時,則判定飛機處于非角運動狀態,運動約束有效。
需要特別指出的是:由于本方法中將地球自轉和載體在地球表面運動所產生的角速度分量視為量測信息的噪聲信息進行處理,所以非角運動狀態時量測向量的殘差均值并不為0,λω,k也不服從χ2分布,TD無法按照誤警率計算得到。在實際應用中,需對飛機的角速度數據進行預分析,綜合考慮所選用慣性器件精度、振動環境等多種因素影響,確定TD取值。
4 基于運動學約束模型輔助的空中動基座對準誤差模型
4.1 對準系統狀態方程
選取捷聯慣導系統的數學平臺誤差角φE、φN、φU,速度誤差δvE、 δvN、 δvU,陀螺隨機常值漂移εbx、εby、εbz,陀螺一階馬爾可夫過程εrx、εry、εrz,加速度計一階馬爾可夫過程 ?x、 ?y、 ?z為對準濾波的狀態量:
則狀態方程為:

式中,X(t)為狀態向量,A(t)為狀態轉移矩陣,G(t)為系統噪聲系數矩陣,W(t)為系統噪聲向量。
4.2 對準系統量測方程
1)慣性/北斗組合量測信息:選擇捷聯慣導系統導航解算得到速度和北斗衛星導航系統測量得到速度的差值作為一組量測信息。誤差均考慮為白噪聲。捷聯慣導系統和北斗衛星導航系統的速度信息可分別表示為vI、vG,則速度量測方程為:

2)運動約束虛擬量測信息:基于運動學約束模型,根據飛機運動的特點,構建虛擬量測信息作為另一組量測信息。第2節中進行了詳細的推導,得到式(9)所示的角速度虛擬量測方程。
采用運動模式判別方案檢測到飛機處于非角運動狀態時,式(14)和式(9)共同構成量測方程,利用Zv(t)和Zω(t)進行量測更新。當檢測到飛機發生了角運動時,即對角速度約束輔助進行隔離,僅利用Zv(t)量測更新。
5 基于運動學約束模型輔助的空中動基座對準算法仿真驗證分析
為驗證本文提出的基于模式判別的運動約束輔助空中動基座對準算法的有效性,對多種典型機動方式進行仿真分析。研究發現,氣流場對不同類型飛機的角速度影響有較大差異,根據對某型飛機相關氣流場影響的分析,在仿真過程中采用10-3(°)/s數量級的白噪聲模擬氣流場對角速度的影響。
5.1 仿真條件及高機動下對準結果
捷聯慣導系統的陀螺儀直接固聯在載體上,其工作環境惡劣,因此陀螺儀和加速度計誤差應考慮一階馬爾可夫過程。仿真參數設置見表1所示。
機動軌跡:在0~20 s進行加速,加速度為4 m/s2;在 20~24 s進行加速拉起,加速度為 5 m/s2,俯仰角速度為 7.5 (°)/s;在 64~68 s改平,俯仰角速度為-7.5 (°)/s;在78~81 s傾斜預轉彎,橫滾角速度為10 (°)/s;在81~141 s轉彎,航向角速度為1.5 (°)/s;在141~143 s改平,橫滾角速度為-10 (°)/s。其三維軌跡圖見圖2,該軌跡中,載體姿態機動較多,基本涵蓋飛機空中飛行的常規角運動模式。
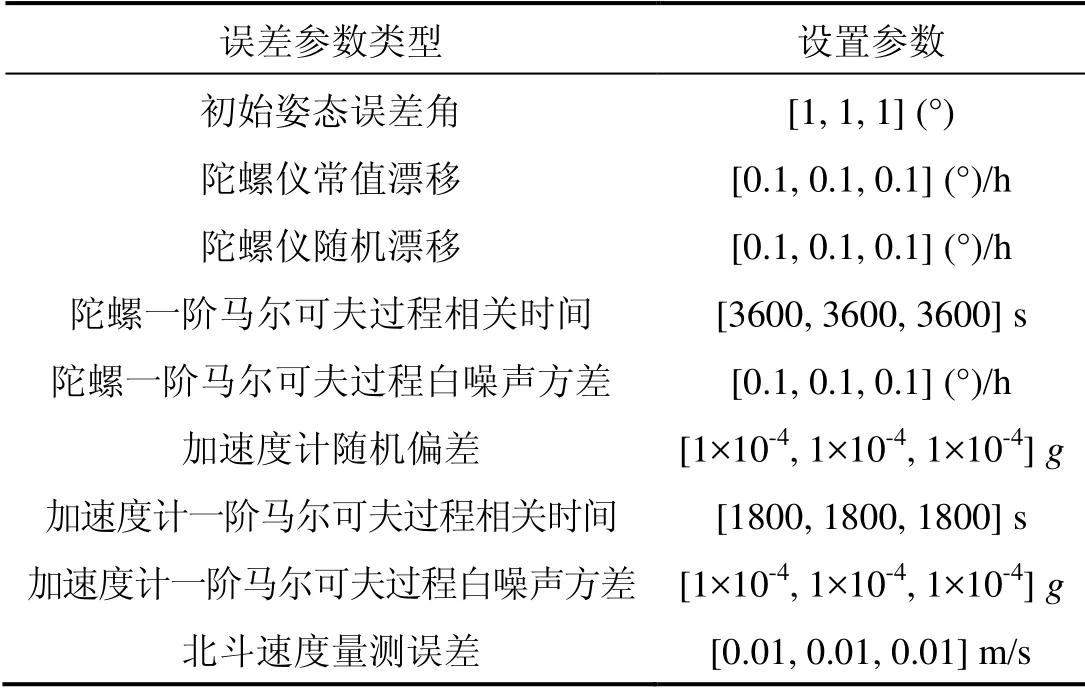
表1 仿真參數Tab.1 Simulation parameter
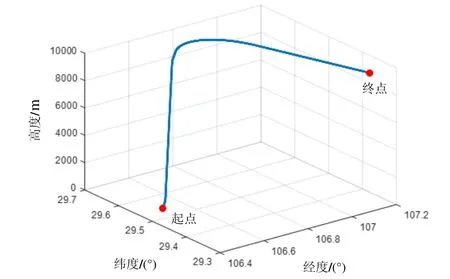
圖2 三維航跡圖Fig.2 Three-dimensional track
采用本文第3節的角運動判別方案對載體飛行模式進行判別,在本文選用的慣性器件精度條件下,進行大量的數據分析,選取較為合適的閾值為TD=15 000。由于角運動集中在前150 s內,因此給出前200 s的相關曲線。角運動模式檢測函數及放大圖見圖3(a)和圖3(b),判別結果見圖3(c)。
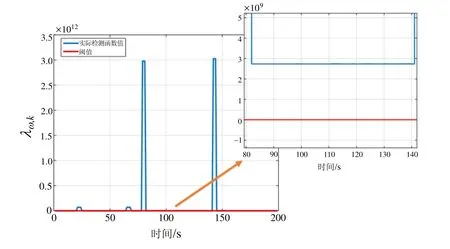
圖3 (a)角運動模式檢測函數Fig.3 (a) Angular motion mode detection function
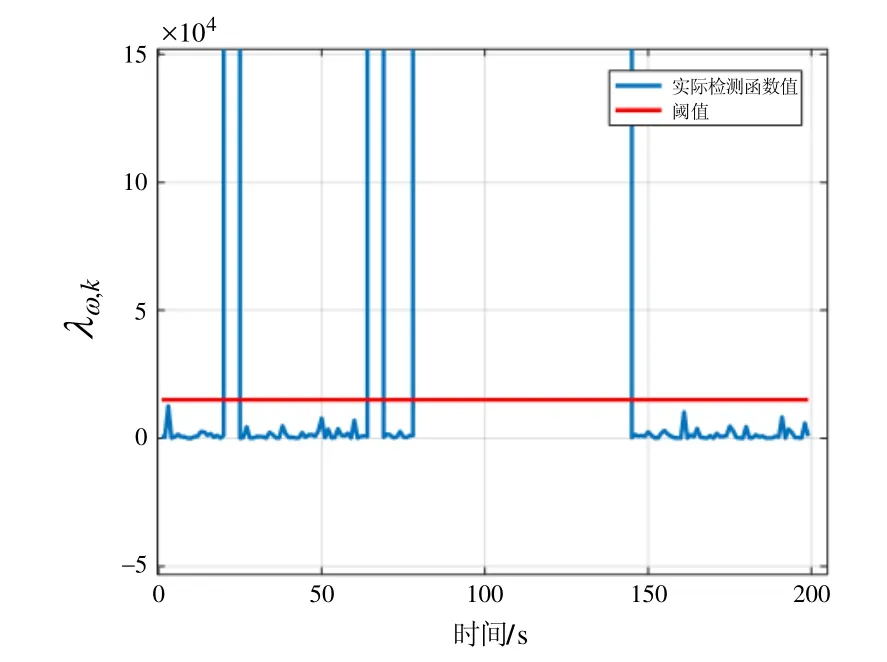
圖3 (b)角運動模式檢測函數放大圖Fig.3 (b) Magnified view of angular motion mode detection function
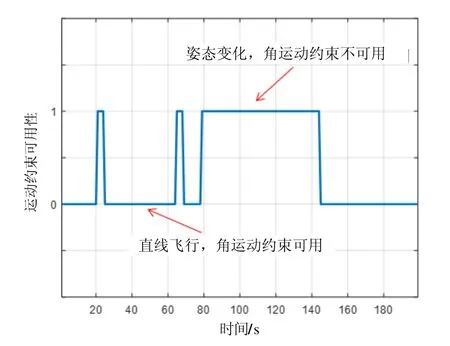
圖3 (c)角運動判別結果Fig.3 (c) Discriminant result of angular motion
由圖3(a)~(c)可以看出,本文提出的基于殘差的運動判別方案,可以有效判斷出飛機處于非角運動狀態的時間區間,從而在恰當時刻引入角速度約束狀態時。考慮地球自轉、載體在地球表面運動以及氣流場所產生的角速度影響,檢測函數值在104量級,而載體處于角運動狀態時,檢測函數值急劇增大,瞬時達到109次方以上,說明本方法可有效地將載體的角運動檢測出來,將地球自轉和載體在地球表面運動所產生的角速度分量視為量測信息的噪聲信息進行處理是可行的。
總的來看,銅仁市由于中低云量偏多,多陰天及陰雨天氣,日照時數大部分地區在1 100~1 300小時之間,日照較少,是全國日照低值區之一。但由于季節分布的不均勻性,秋收作物生育期光照條件比較好,光能的有效性高,能滿足花生生長需要。
根據飛機角運動模式的判別結果,在非角運動狀態下,采用本文提出的基于運動學約束輔助的北斗衛星導航系統空中動基座對準方法對捷聯慣導系統失準角進行估計,選擇僅利用北斗衛星導航系統信息的動基座對準算法作為對比進行分析驗證。濾波過程中對慣導系統進行閉環校正,通過誤差校正后的姿態與真實姿態作差(即姿態角誤差)對比分析。姿態誤差曲線如圖4所示,其中“運動約束+北斗輔助對準”是指采用本文所提出的基于模式判別的運動學約束輔助后的空中動基座對準方法,“北斗輔助對準”是指僅用北斗衛星導航系統輔助的空中動基座對準算法。
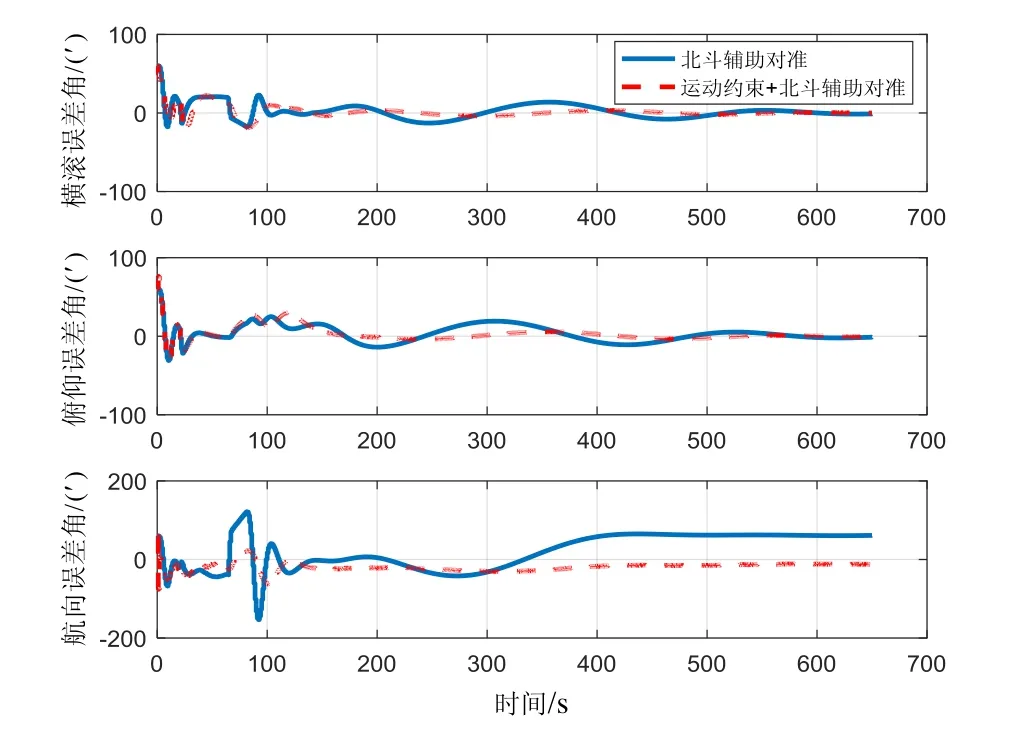
圖4 高機動下兩種對準方法姿態誤差曲線Fig.4 Attitude error curves of two alignment methods under high maneuvering
在對準600 s至650 s的時間內,兩種對準方法的均值和標準差雷達圖如圖5所示。
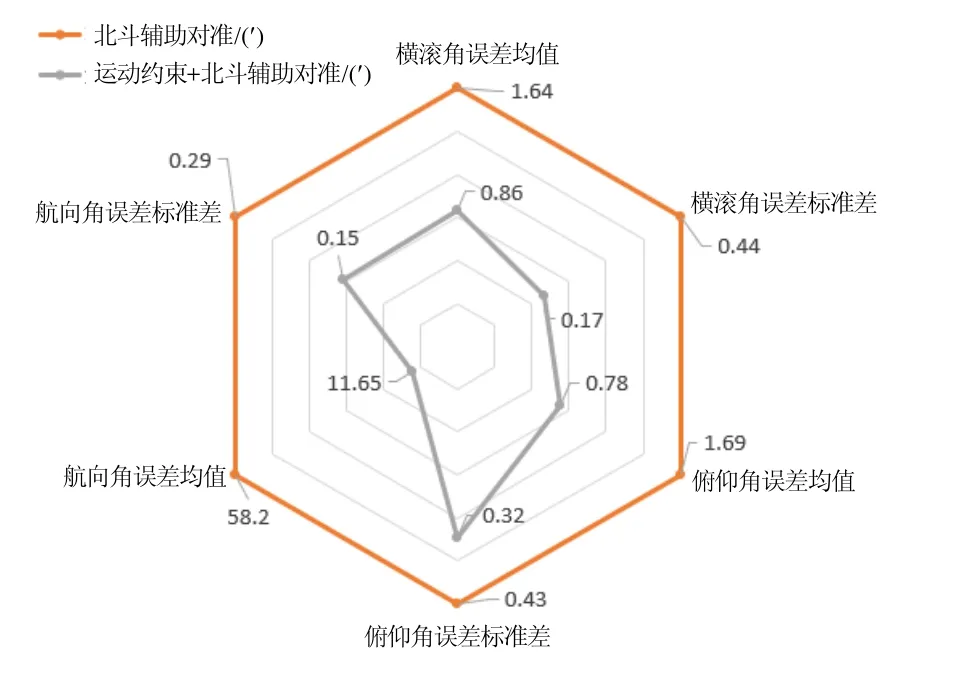
圖5 兩種對準方法性能對比雷達圖Fig.5 Radar chart of performance comparison on two alignment methods
可以看出,載體在對準期間多次進行姿態機動,對于采用速度信息作為外觀測量進行匹配的北斗輔助空中動基座對準,一方面增強了航向角的可觀測性,機動結束后航向角對準精度得到提高,另一方面當載體作機動飛行時,卡爾曼濾波會產生較大的濾波誤差,對準的快速性受到影響,穩定時間較長,在550 s左右橫滾角和俯仰角收斂到4′以內。在較長的穩定時間內,航向角可觀測性較低導致其誤差再次增大,而卡爾曼濾波在濾波達到穩態時會對誤差失去敏感性。
本文所提出的方法對準精度和快速性均有了明顯提升,橫滾角和俯仰角在 400 s左右均可收斂到4′以內,航向角在450 s左右收斂并保持在15′以內。且由圖5可知,在相同的對準時間內,本文方法可以達到更高的對準精度。
5.2 多種機動條件下對準結果
由于飛行軌跡對狀態變量的可觀性有直接的影響,載體機動飛行的軌跡與對準精度關系十分密切。因此在多種典型機動方式下進行對準解算,以驗證本文方法的適用性。受本文篇幅所限,僅給出對準的姿態精度。
機動1:加速機動,在10~50 s進行加速,加速度為5m/s2。姿態誤差曲線如圖6(a)所示。
機動2:勻速機動,載體勻速直線飛行。姿態誤差曲線如圖6(b)所示。
機動3:蛇形機動,載體在10~20 s進行一組蛇形機動,角速度為5 (°)/s。姿態誤差曲線如圖6(c)所示。
上述三種機動條件下,兩種對準方法的航向角對準時間和對準精度的雷達圖如圖7所示,其中勻速機動條件下,僅采用北斗輔助的空中對準方法航向角不收斂,此處采用初始航向誤差角(60′)作為其對準精度,仿真時間(150 s)作為其對準時間進行繪圖。
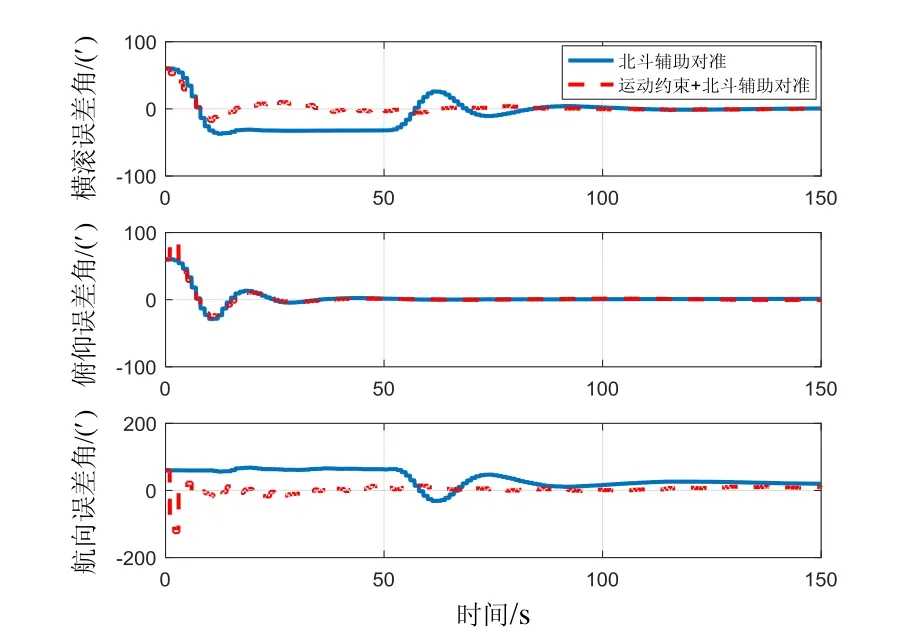
圖6 (a) 加速機動下兩種對準方法姿態誤差曲線Fig.6 (a) Attitude error curves of two alignment methods under acceleration maneuvering
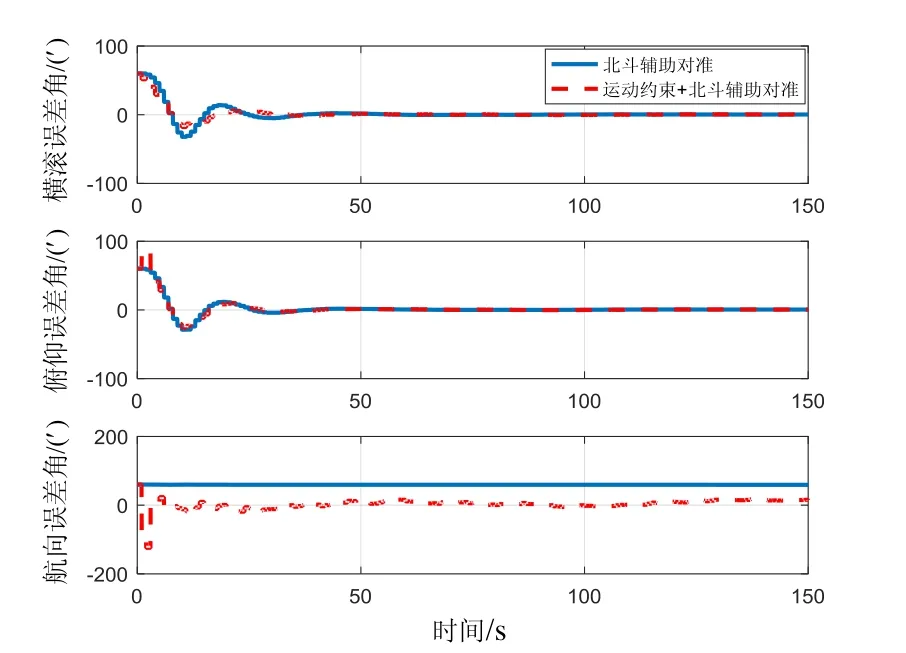
圖6 (b) 勻速飛行下兩種對準方法姿態誤差曲線Fig.6 (b) Attitude error curves of two alignment methods under uniform-velocity flight
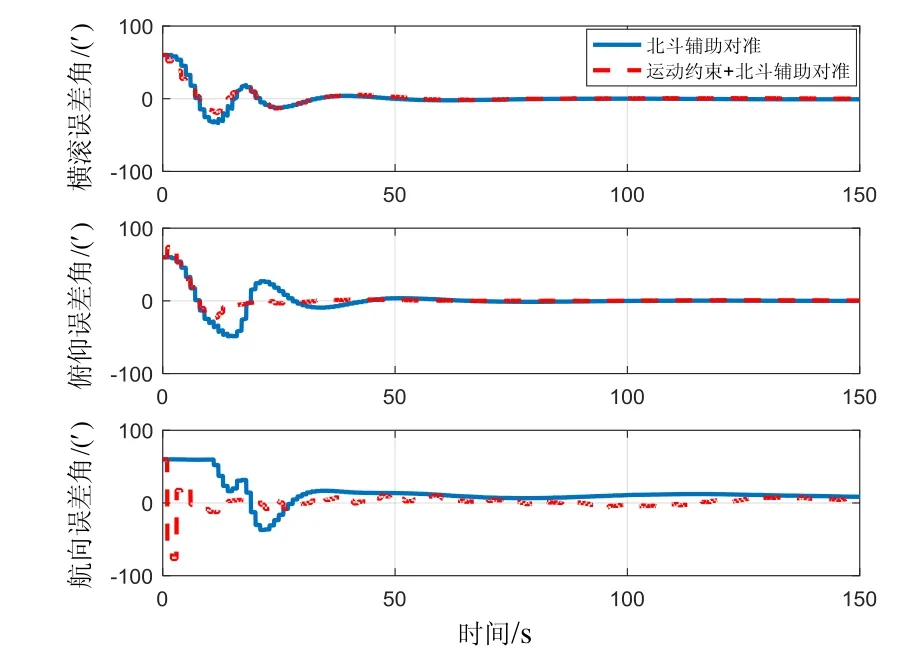
圖6 (c) 蛇形機動下兩種對準方法姿態誤差曲線Fig.6 (c) Attitude error curves of two alignment methods under snake maneuvering
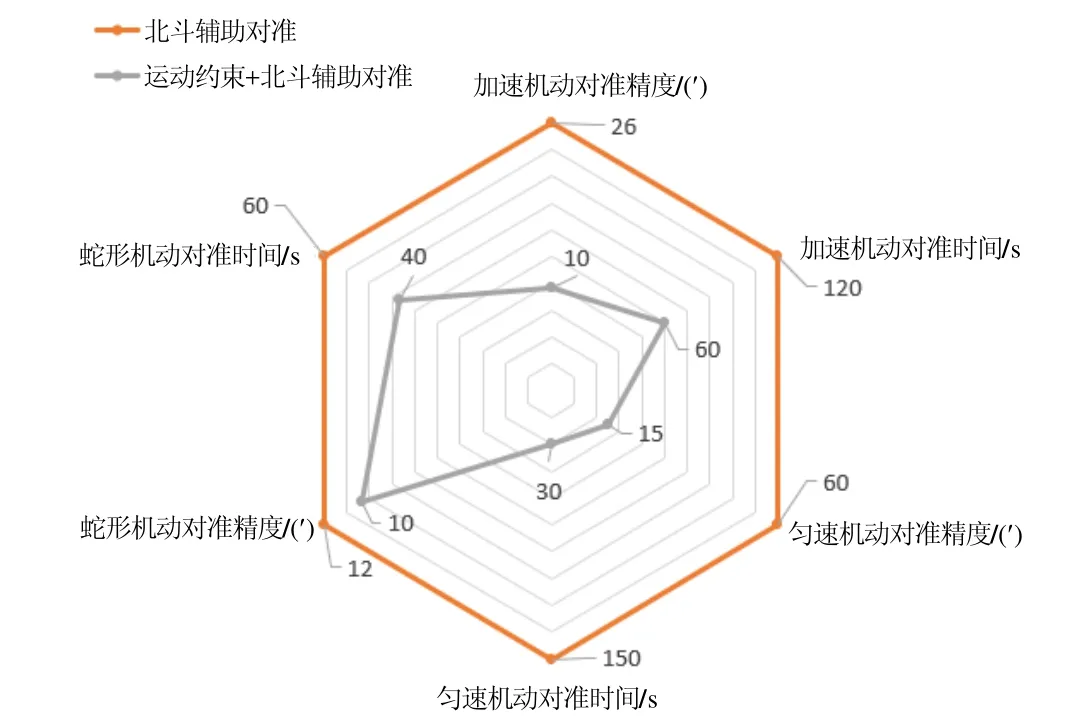
圖7 多種機動方式下航向角對準性能雷達圖Fig.7 Radar chart of heading angle alignment performance under multiple maneuver modes
可知:1)在多種機動方式下,采用本文提出的基于運動學約束輔助的北斗空中動基座對準方法,均可以顯著提高對準的快速性及對準精度,尤其是航向角的對準性能。這是因為本文方法在北斗輔助的基礎上增加了角速度約束輔助量測信息,航向角的可觀測性提高,因此在穩定性和精度方面都優于僅采用北斗輔助的空中動基座對準。2)在勻速直飛時(加速機動前20 s以及勻速機動全程),采用速度信息作為外觀測量進行匹配的北斗輔助空中動基座對準,方位失準角不可觀,因此航向角完全不收斂。而本文方法中角速度約束虛擬量測信息的引入,增加了方位失準角的可觀測性,在勻速直飛運動下,航向角也迅速收斂,顯著改善了其對準精度和快速性。
6 結 論
為了提高飛機快速反應能力,優化初始對準性能,在傳統北斗輔助捷聯慣導系統進行動基座初始對準架構下,提出基于殘差的角運動模式判別方案,在此基礎上研究提出一種基于運動學約束模型輔助的空中動基座對準方法。在多種機動方式下驗證該方案的可行性及空中動基座對準性能。仿真驗證結果表明:采用本文提出的基于運動學約束輔助的北斗空中動基座對準方法,各種機動條件下均可顯著提高對準的快速性及精度。在典型的加速機動下,本文方法與僅采用北斗信息的空中動基座對準相比,航向角對準時間由120 s縮減至60 s,對準精度由26′提升至10′。本文提出的方法在不增加傳感器的前提下,優化了空中動基座初始對準性能,對工程應用具有重要的參考價值。
