利用車載激光掃描的城市道路健康監(jiān)測
2020-02-04 07:40:45趙婧文
科技資訊 2020年36期
關(guān)鍵詞:大數(shù)據(jù)
趙婧文
摘 ?要:公路在我國的交通運輸中起著極大的作用,是國民經(jīng)濟(jì)的重要基礎(chǔ)設(shè)施,道路的健康狀況對于交通運輸拍安全性及城市整體規(guī)劃都有著至關(guān)重要的影響。車載激光掃描具有野外作業(yè)量小、自動化、高密度、高精度、數(shù)據(jù)可重復(fù)使用等優(yōu)點,可以用于道路的數(shù)據(jù)采集,進(jìn)一步實現(xiàn)道路健康監(jiān)測。該文以上海市某高速公路為例,證明了車載掃描過程中拍攝的全景照片能夠高效、快速、直觀地識別路面和道路部件的損壞,發(fā)現(xiàn)影響市容市貌的問題,為決策層及時采取措施提供數(shù)據(jù)。
關(guān)鍵詞:道路健康監(jiān)測 ?車載激光掃描 ?大數(shù)據(jù) ?全景照片
中圖分類號:P234 ? ? ? ? ? ? ? ? ? ? ? ? ? ? 文獻(xiàn)標(biāo)識碼:A文章編號:1672-3791(2020)12(c)-0059-03
City Road Health Monitoring by Vehicle-Borne LiDAR
ZHAO Jingwen
(Shanghai Surveying and Mapping Institute, Shanghai, 200092 ?China)
Abstract:As an important infrastructure of the national economy, highway plays a significant role in the transportation of our country. The health status of the highway has a crucial impact on the safety of transportation and the overall planning of the city. Vehicle-borne laser scanning has the advantages of small field operation, automation, high density, high precision, and reusable data, which can be used for highway data acquisition and further realize road health monitoring. Taking an expressway in Shanghai as an example, this paper proves that the panoramic photos taken during scanning can effectively, quickly and intuitively identify the damage of road surface and road components, find the problems of city appearance and provide data for decision-makers to take timely measures.
Key Words:Road health monitoring; Vehicle-borne LiDAR; Big data; Panoramic photos
道路是城市環(huán)境中最具活力的區(qū)域,也是城市的血管。疏通城市的“毛細(xì)血管”,有利于提升路網(wǎng)功能,為市民出行提供安全、暢通、高效、舒適的通行環(huán)境,促進(jìn)區(qū)域經(jīng)濟(jì)發(fā)展[1]。由于自然和(或)人為壓力的不斷增加,如泥沙、地下水或天然氣開采、結(jié)構(gòu)老化、重載卡車超載、地下建筑、濕氣腐蝕或設(shè)計缺陷,路面和民用基礎(chǔ)設(shè)施正在逐漸惡化,可能會造成災(zāi)難性的結(jié)構(gòu)破壞,導(dǎo)致巨大的人身和經(jīng)濟(jì)損失。城市道路的健康監(jiān)測包括建立城市道路清單、動態(tài)掌握道路及沿線設(shè)施的現(xiàn)狀、分析和預(yù)測可能發(fā)生的風(fēng)險、及時發(fā)現(xiàn)和修補損壞、美化綠化景觀等諸多方面。城市道路及其沿線設(shè)施的養(yǎng)護(hù)是一項任務(wù)繁雜、系統(tǒng)性強的工作。公路養(yǎng)護(hù)原則上應(yīng)以預(yù)防為主,防治結(jié)合,采取正確的技術(shù)措施治理病害和消除隱患,提高養(yǎng)護(hù)質(zhì)量,確保公路在設(shè)計年限內(nèi)的正常使用或延長公路的使用年限。然而,現(xiàn)有的監(jiān)測路面健康狀況的主要方式是利用專業(yè)儀器,造價高且需要相關(guān)專業(yè)人員花費大量的時間和精力完成測量,信息獲取效率和更新頻率亟待提升,面對道路養(yǎng)護(hù)大數(shù)據(jù),目前的技術(shù)和管理模式還沒有有效地收集和挖掘其價值,一些潛在風(fēng)險還不能及時被發(fā)現(xiàn)[2]。
三維激光掃描技術(shù)又被稱為實景復(fù)制技術(shù),是測繪領(lǐng)域繼GPS技術(shù)之后的一次技術(shù)革命[3]。它突破了傳統(tǒng)的單點測量方法,具有高精度、高分辨率、高自動化且高效率的獨特優(yōu)勢。激光探測及測距系統(tǒng)(LiDAR,Light Detection and Ranging)是一種主動遙感設(shè)備,集激光掃描儀、全球定位系統(tǒng)和慣性導(dǎo)航系統(tǒng)技術(shù)于一身,同時配備高分辨率數(shù)碼相機,可實現(xiàn)對目標(biāo)的同步測量,生成高密度激光點云數(shù)據(jù),已成為世界各國進(jìn)行大面積地表數(shù)據(jù)采集的主流與趨勢。將LiDAR搭載在機動車上,可以快速、高密度、低成本、高精度、高自動化地完成道路及其沿線的設(shè)施的三維信息采集,豐富了數(shù)據(jù)表現(xiàn)力,進(jìn)而彌補現(xiàn)有健康監(jiān)測方式的不足[4]。
該文立足智慧城市建設(shè),用車載掃描技術(shù),探討大數(shù)據(jù)背景下城市道路的健康監(jiān)測方法和模式。
1 ?道路健康監(jiān)測
道路健康監(jiān)測可分為路面監(jiān)測和道路上部件監(jiān)測兩部分[5]。道路上部件包括桿狀物體(路燈、電桿、探頭、交通標(biāo)志、護(hù)欄、消防栓等)、箱子(垃圾箱、電源箱、電信箱、控制箱等)等。健康檢測的內(nèi)容包括:路面和路緣石是否有破損,下沉、坑洼、裂縫、道路部件(如隔離護(hù)欄、電桿、路燈、探頭等附屬設(shè)施)是否變形損壞,交通標(biāo)線標(biāo)志是否模糊、綠化邊界及位置是否改變等。
車載激光掃描獲取的兩個主要數(shù)據(jù)是三維點云和全景照片。將定位系統(tǒng)獲取的系統(tǒng)位置、慣性導(dǎo)航系統(tǒng)獲取的姿態(tài)信息和激光傳感器獲取的掃描距離與角度信息進(jìn)行時間匹配,解算得到大地坐標(biāo)下的三維激光點云。高清全景相機內(nèi)部多個鏡頭經(jīng)過標(biāo)定,能夠獲取在全景相機坐標(biāo)系下三維點的精確位置。通過同名特征點匹配,相機坐標(biāo)系可以與絕對空間坐標(biāo)系建立轉(zhuǎn)換關(guān)系,實現(xiàn)點云和全景影像的精確配準(zhǔn)。
一些研究利用點云進(jìn)行道路健康監(jiān)測,例如:Mohammad等人基于幾何表面特征客觀地識別不同時期路面的損傷、缺陷、裂紋和其他異常[6];Yu等人先提取路面點云,然后根據(jù)強度或最小高度等特征將其投影到二維GRF圖像中,進(jìn)而識別道路裂縫[7];還有一些研究采用了先進(jìn)的數(shù)據(jù)挖掘、基于人工智能和神經(jīng)網(wǎng)絡(luò)的方法檢測問題[8-9]。然而,這些方法計算量大且耗時,而且人工提取訓(xùn)練樣本是一項枯燥而繁重的工作,參數(shù)的選擇極大地依賴于數(shù)據(jù)質(zhì)量和裂紋變化。
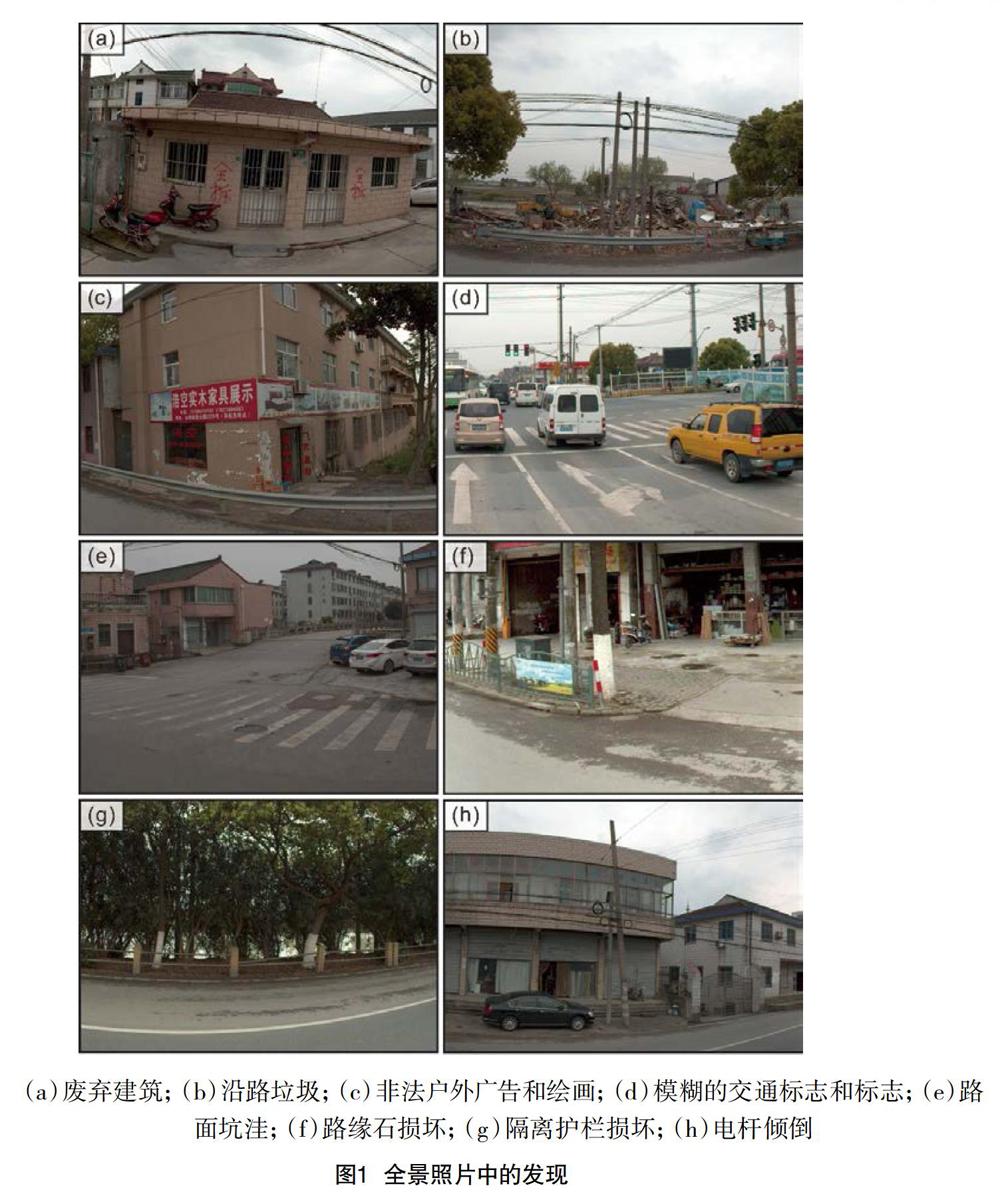
由于點云數(shù)據(jù)量大、處理難度大、冗余度大,因此該文利用全景照片來識別影響城市外觀的環(huán)境問題,發(fā)現(xiàn)路面和道路部件的損壞。車載激光掃描可在特定道路上定期進(jìn)行,借助全景照片,采用360°街景的展現(xiàn)方式,及時發(fā)現(xiàn)生活垃圾和建筑垃圾的堆積,輔助違法、廢棄建筑的認(rèn)定和拆除,辨認(rèn)沿街殘破老舊的建筑物以便修復(fù),及時發(fā)現(xiàn)道路沿線褪色及損毀的墻體、違法戶外廣告及門牌等,以便組織整改。此外,全景照片還可以檢測出路面或路緣石的破損、下沉、坑洼、隔離護(hù)欄、電線桿等輔助設(shè)施的變形和損壞、模糊的交通標(biāo)志和標(biāo)志。
2 ?實驗結(jié)果與討論
該文使用華測導(dǎo)航(CHCNAV)的AS-900HL移動掃描系統(tǒng)。AS-900HL采用RIEGL VUX-1無人機激光掃描儀,重量僅為3.75 kg,可圍繞車行方向旋轉(zhuǎn),掃描街道環(huán)境。激光掃描儀的視場為330 FOV,掃描頻率為10~200 Hz,精度優(yōu)于10 mm。所拍攝的HDR全景照片的分辨率為6 000×4 000,達(dá)到2 430萬像素。
實驗區(qū)是上海郊區(qū)的一條高速公路,其全長約13 km。車載激光雷達(dá)系統(tǒng)以10 m的拍攝間隔拍攝了約2 600張全景照片。這條公路年久失修,當(dāng)?shù)亟ㄔO(shè)管理部門希望對這條公路展開全面整治,以街道凈化、兩側(cè)綠化、立面美化和環(huán)境優(yōu)化為目標(biāo),推動城市面貌再上新臺階。
通過軟件對車載掃描獲取的2 600張全景照片排查,可以對公路健康狀況有直觀、清晰的認(rèn)識,可以有效識別一些影響城市環(huán)境的問題,例如:要拆除的廢棄建筑(圖1(a))、堆積的垃圾(圖1(b))、道路沿線的非法戶外廣告和繪畫(圖1(c));及時發(fā)現(xiàn)并定位一些對道路安全運行有潛在威脅的問題,例如模糊的交通標(biāo)志(圖1(d))、路面坑洼(圖1(e))、路緣石損壞(圖1(f))、隔離護(hù)欄損壞(圖1(g))、電桿傾倒(圖1(h))等。
通過配準(zhǔn)后全景照片的位置信息,這些健康監(jiān)測的問題可以被準(zhǔn)確定位。智能交通系統(tǒng)(ITS)和車輛社會網(wǎng)絡(luò)(VSN)可以利用移動、空間和被動傳感眾包技術(shù)隨時隨地收集數(shù)據(jù),用于基礎(chǔ)設(shè)施健康監(jiān)測、導(dǎo)航路徑規(guī)劃和擁堵管理等,合作經(jīng)營的模式將大大降低管理成本。
3 ?結(jié)語
該文利用車載激光掃描系統(tǒng),以提高安全性、效率、靈活性和數(shù)據(jù)可重復(fù)使用性為目的,實現(xiàn)了道路清查和健康監(jiān)測。通過高速公路改造實例證明,高清全景圖可用于道路清查和健康監(jiān)測,此方法能快速、直觀地識別影響城市外觀的環(huán)境問題,及時發(fā)現(xiàn)路面和道路部件的損毀,為有關(guān)部分提供及時可靠的決策依據(jù),提高了工作效率,節(jié)省了人力、物力,對于提高道路健康監(jiān)測的效率及自動化水平具有十分重要的作用。
參考文獻(xiàn)
[1] 楊濤.健康城市道路網(wǎng)體系:理念與要領(lǐng)[J].現(xiàn)代城市研究,2013(8):89–94.
[2] 毛海東.大數(shù)據(jù)背景下的城市道路養(yǎng)護(hù)管理研究[J].市政技術(shù),2019(2):45-46.
[3] 胡雨佳.車載激光掃描技術(shù)研究與應(yīng)用現(xiàn)狀[J].中小企業(yè)管理與科技,2014(9):301-302.
[4] 李明輝,田雪冬,胡維強.基于車載三維激光掃描的道路線提取研究[J].測繪與空間地理信息,2014(4):118-121.
[5] takashi fuse, nato yokozawa. Development of a Change Detection Method with Low-Performance Point Cloud Data for Updating Three-Dimensional Road Maps[J].ISPRS International Journal of Geo-Information,2017,6(12):398-419.
[6] mohammad ebrahim mohammadi,richard wood,wittich. Non-Temporal Point Cloud Analysis for Surface Damage in Civil Structures[J].International Journal of Geo-Information,2019,8(12):527-554.
[7] yu yongtao, li jondthan,gvan haiyan,et al. 3D crack skeleton extraction from mobile LiDAR point clouds[C]//IEEE international Geoscience and Remote Sensing Symposium(igarss 2014).2014: 914-917.
[8] tonis soar,ott talvik. Automatic asphalt pavement crack detection and classification using neural networks[C]//12th Biennial Baltic,Electronics Conference(bec).2010:345–348.
[9] Gavilán M., Balcones D., Marcos O., et al. Adaptive road crack detection system by pavement classification[J].Sensors 2011,11(10):9628-9657.
猜你喜歡
中國市場(2016年36期)2016-10-19 04:41:16
中國市場(2016年36期)2016-10-19 03:31:48
中國市場(2016年35期)2016-10-19 01:30:59
商(2016年27期)2016-10-17 06:26:00
今傳媒(2016年9期)2016-10-15 23:35:12
今傳媒(2016年9期)2016-10-15 22:09:11
新聞世界(2016年10期)2016-10-11 20:13:53
科技視界(2016年20期)2016-09-29 10:53:22
中國記者(2016年6期)2016-08-26 12:36:20