考慮漏磁的力矩馬達磁路建模方法及特性分析
2020-03-04 01:07:56訚耀保郭文康李銳華
哈爾濱工程大學(xué)學(xué)報 2020年12期
訚耀保,郭文康,李銳華
(1.同濟大學(xué) 機械與能源工程學(xué)院,上海 201804;2.同濟大學(xué) 電子與信息工程學(xué)院,上海 201804)
電液伺服閥是電液伺服控制系統(tǒng)的核心部件,可將電信號轉(zhuǎn)換為相應(yīng)的流量和壓力信號,以控制機械執(zhí)行器的輸出位移和力。電-機械轉(zhuǎn)換裝置作為其動力源和驅(qū)動裝置,其性能直接影響甚至決定整個系統(tǒng)的性能,因此高性能電-機械轉(zhuǎn)換器的研究和開發(fā)一直是學(xué)術(shù)界與工業(yè)界關(guān)注的焦點。早期的電液伺服閥由小型電動伺服電機驅(qū)動[1],然而,這種電機具有較大的時間常數(shù),導(dǎo)致伺服閥成為控制回路中響應(yīng)最慢的部件,從而限制了系統(tǒng)性能。力矩馬達最早出現(xiàn)在19世紀末期,Siemens發(fā)明了具有永磁力矩馬達且能接收機械及電信號2種輸入的雙輸入閥,并開創(chuàng)性地用于航空領(lǐng)域。MIT實驗室首次使用力矩馬達代替螺線管來驅(qū)動兩級閥的先導(dǎo)級,降低了能耗并提高了線性度[2]。Moog[3-4]發(fā)明了采用濕式力矩馬達的單/雙噴嘴擋板兩級電液伺服閥,降低了功耗,提高了控制精度。Wolpin[5]將力矩馬達從流體中隔離,發(fā)明了干式力矩馬達,解決了力矩馬達因油液污染導(dǎo)致的可靠性問題。李松晶[6-8]將磁流變液體應(yīng)用于力矩馬達,并得出結(jié)論,磁流體可以提高伺服閥力矩馬達的穩(wěn)定性,但旋轉(zhuǎn)角度和輸出力矩略微減小。一直以來,如何準確分析力矩馬達特性及提升力矩馬達性能都是本領(lǐng)域的研究重點。
磁路分析是力矩馬達特性分析的基礎(chǔ),由于磁路中導(dǎo)磁材料的磁導(dǎo)率一般僅比非導(dǎo)磁材料的磁導(dǎo)率大幾千倍,所以漏磁在磁回路中十分普遍。其普遍存在于力矩馬達結(jié)構(gòu)中,可大致分為永磁體漏磁、工作氣隙漏磁和控制線圈漏磁。漏磁系數(shù)的倒數(shù)即磁通的實際利用率,可通過試驗測量磁路的實際磁通來計算或用經(jīng)驗系數(shù)進行估算。Merritt[1]歸納出力矩馬達的磁路分析方法,但在其建立的磁路模型中并未考慮漏磁和工作氣隙以外的磁阻。文獻[9]考慮了永磁體磁阻、氣隙處漏磁和線圈漏磁對力矩馬達空載角位移特性及力特性的影響,并將理論計算數(shù)值和試驗數(shù)據(jù)進行了比較,相對誤差在20%左右。Urata[10]指出文獻[1]模型中當工作氣隙趨近于零時,工作氣隙處磁通和銜鐵的輸出力矩趨向無窮大的不合理處,通過建立考慮永磁體磁阻和永磁體漏磁的磁路模型對文獻[1]模型進行修正,并理論推導(dǎo)出永磁體提供總磁動勢的計算公式,提出了一種簡明的磁路分析方法。姜洪洲等[11]在文獻[10]模型的基礎(chǔ)上,考慮了力矩馬達中導(dǎo)磁體和銜鐵的磁阻,完善了磁路模型,并通過試驗進行驗證,完善后的理論計算值比文獻[10]的理論計算值更加接近試驗值。眾多研究表明,電液伺服閥力矩馬達中永磁體產(chǎn)生磁通的實際利用率較低,一般小于20%,甚至5%[11]。考慮永磁體漏磁,能更精確的反映力矩馬達特性。力矩馬達工作氣隙處的漏磁和控制線圈處的漏磁尚未得到深入研究,因此理論與試驗仍存在較大差距,其應(yīng)用受到一定限制。
本文在考慮永磁體漏磁、磁阻,以及導(dǎo)磁體磁阻的基礎(chǔ)上,進一步考慮力矩馬達中工作氣隙和控制線圈處的漏磁,完善力矩馬達磁路模型,并對工作氣隙處的磁通和力矩馬達的輸出力矩進行推導(dǎo),將數(shù)值模擬分析結(jié)果和試驗數(shù)據(jù)進行比較,建立更加精確的力矩馬達數(shù)學(xué)模型。
1 力矩馬達工作原理及磁路模型
1.1 力矩馬達結(jié)構(gòu)及工作原理
力矩馬達的結(jié)構(gòu)示意圖如圖1所示。它主要由永磁體、導(dǎo)磁體、銜鐵和線圈組成。導(dǎo)磁體和銜鐵通常由軟磁材料制成,如1J50,其成本較低且具有較高的磁導(dǎo)率。永磁體和控制線圈分別提供固定磁通和控制磁通,用于驅(qū)動力矩馬達工作。圖2是力矩馬達中的磁路示意圖。當無電流供給控制線圈時,銜鐵處于初始平衡位置,此時各氣隙長度大小相等。當向線圈供電時,由線圈產(chǎn)生的控制磁通依次通過導(dǎo)磁體、氣隙和銜鐵。控制磁通和由永磁體產(chǎn)生的固定磁通在工作氣隙處疊加,導(dǎo)致同側(cè)氣隙中的磁通密度差異,從而引起銜鐵旋轉(zhuǎn)。此時彈簧管發(fā)生彈性變形產(chǎn)生反向力矩,當彈簧管變形產(chǎn)生的力矩和控制電流與永磁體產(chǎn)生的電磁力矩相平衡時,銜鐵組件即處于平衡位置。例如,當線圈按圖2所示方式通電時,在力矩馬達中形成2個控制磁通回路。氣隙1和3處的疊加磁密度由于固定磁通和控制磁通具有相同方向而增強,由于相反方向在氣隙2和4處減弱。故氣隙1和3處的吸引力大于氣隙2和4處的吸引力,從而引起銜鐵的順時針旋轉(zhuǎn)。同理,如果控制線圈中的輸入電流反轉(zhuǎn)方向,則氣隙中產(chǎn)生的磁通密度差異將導(dǎo)致銜鐵產(chǎn)生逆時針旋轉(zhuǎn)。

圖1 力矩馬達示意Fig.1 Schematic of torque motor
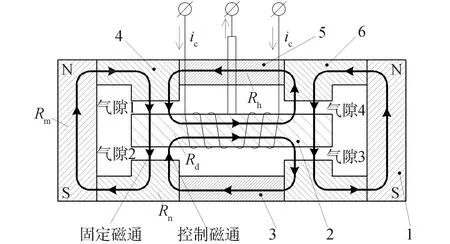
注:1.永磁體;2.銜鐵;3.下導(dǎo)磁體;4.左導(dǎo)磁體;5.上導(dǎo)磁體;6.右導(dǎo)磁體圖2 力矩馬達磁路示意Fig.2 Magnetic circuit diagram of torque motor
1.2 力矩馬達磁路等效模型
根據(jù)磁路和電路的相似性,可通過建立等效磁路模型對力矩馬達特性進行分析。分析中假定力矩馬達中由加工和裝配帶來的尺寸誤差可以忽略不計,且不考慮磁性材料的磁滯效應(yīng)。圖3是考慮了圖2中永磁體、氣隙和控制線圈處的漏磁,以及永磁體、導(dǎo)磁體磁阻影響的力矩馬達等效磁路圖,圖中A、B、C分別代表永磁體、氣隙和控制線圈處的漏磁。
由于磁路與電路的相似性,可運用基爾霍夫定律對圖3中的各個磁回路進行計算。圖中λ表示導(dǎo)磁體內(nèi)磁通與永磁體產(chǎn)生總磁通的比值,即永磁體磁通的利用率,其與永磁體形狀以及與永磁體相配合的導(dǎo)磁體的形狀有關(guān)。ζ表示工作氣隙有效磁通與導(dǎo)磁體內(nèi)磁通的比值,即導(dǎo)磁體內(nèi)磁通的實際利用率,其與工作氣隙的形狀以及介質(zhì)有關(guān)。β為銜鐵內(nèi)磁通與控制線圈產(chǎn)生磁通的比值,即控制線圈產(chǎn)生磁通的實際利用率,其與銜鐵的形狀有關(guān)。圖4為工作氣隙處的漏磁示意圖。
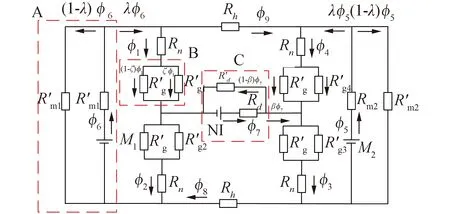
圖3 力矩馬達等效磁路Fig.3 Equivalent magnetic circuit diagram of torque motor
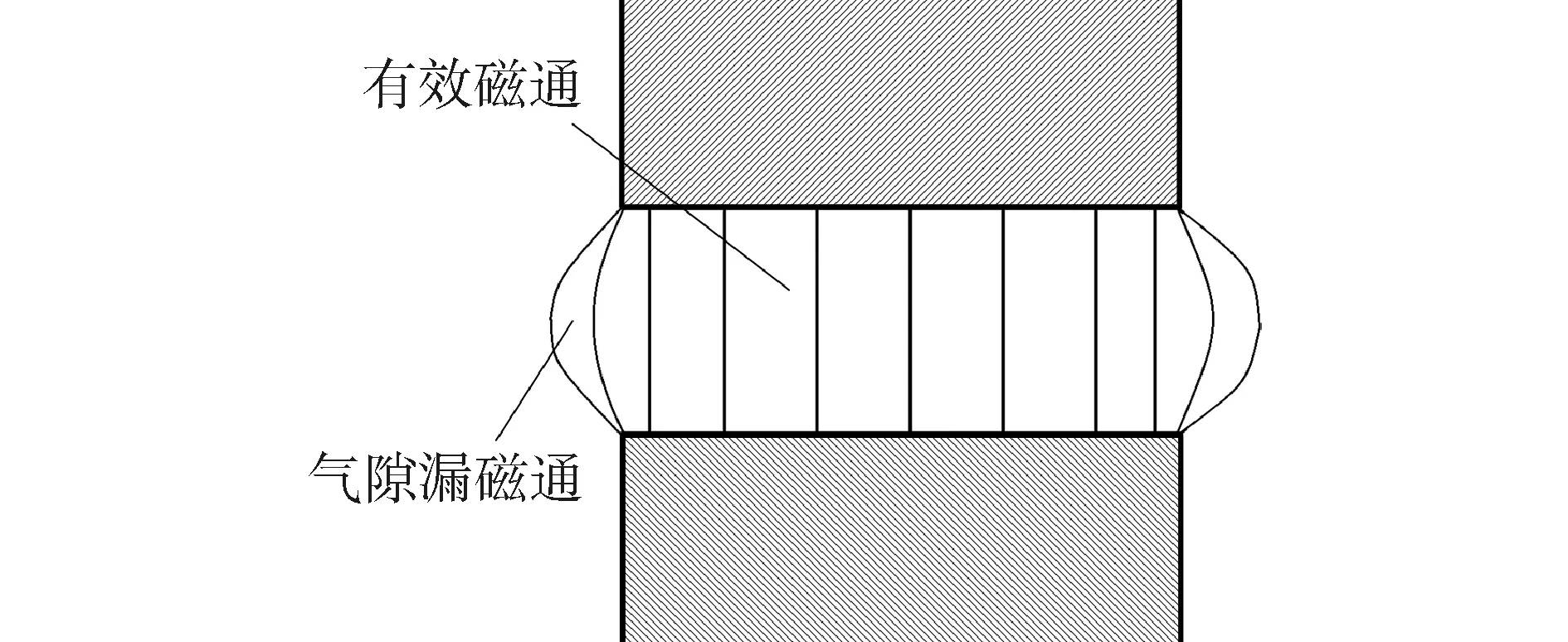
圖4 工作氣隙處漏磁示意Fig.4 Schematic diagram of magnetic flux leakage at working air gap
根據(jù)磁路的基爾霍夫定律,由圖3可以得:
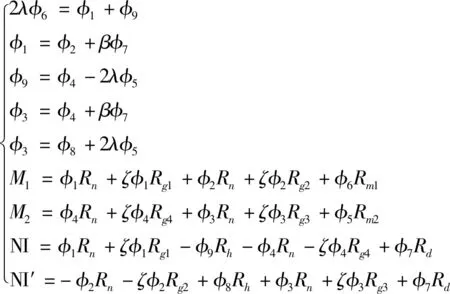
(1)
式中:Rh為力矩馬達中上下導(dǎo)磁體的磁阻;Rn為左右導(dǎo)磁體的磁阻;Rd為銜鐵的磁阻;Rm為一側(cè)永磁體的磁阻;Rg為工作氣隙處的磁阻;NI和NI′分別為上下2個磁回路。且由于力矩馬達的工作方式,左右導(dǎo)磁體內(nèi)始終有固定磁通通過,由軟磁材料的磁化曲線可知,左右導(dǎo)磁體的的磁導(dǎo)率與上下導(dǎo)磁體、銜鐵的磁導(dǎo)率不同。則有:
(2)
式中:ln為左右導(dǎo)磁體單邊垂直部分的長度;ld為銜鐵的長度;lh為上下導(dǎo)磁體水平部分的長度;lm為永磁體的長度;g為初始狀態(tài)下工作氣隙的長度;μn為左右導(dǎo)磁體的磁導(dǎo)率;μr為上下導(dǎo)磁體以及銜鐵的磁導(dǎo)率;μm為永磁體磁導(dǎo)率;μ0為真空磁導(dǎo)率,磁導(dǎo)率是表征磁介質(zhì)在磁場中導(dǎo)通磁力線能力的物理量;An為左右導(dǎo)磁體單邊垂直部分的橫截面積;Ad為銜鐵的橫截面積;Ah為上下導(dǎo)磁體的水平部分的橫截面積;Am為永磁體的橫截面積;Ag為工作氣隙的有效面積。
式(1)中λ、ζ、β大小借助仿真進行確定:
(3)
式中:φg為永磁體在氣隙處提供的固定磁通;φc為控制電流在氣隙處提供的控制磁通。
將式(2)代入式(1)中可以解得通過工作氣隙1、2的磁通分別為:
(4)
(5)
式中:x=aθ;γ=λζ;a為銜鐵的旋轉(zhuǎn)半徑;θ為銜鐵的角位移;x為力矩馬達工作過程中銜鐵偏轉(zhuǎn)所引起的工作氣隙的變化量。Rf為固定磁通回路中的總磁阻,Rf=2Rgγ+Rm/2+2Rnλ;Rc為控制磁通回路中的總磁阻,Rc=2ζβRg+2Rd+2βRn+βRh。其中:
(6)
(7)
(8)
力矩馬達的主要參數(shù)如表1所示。上式中M0為永磁體的極化磁動勢,其與永磁體的實際工作點有關(guān)。圖5是永磁體的B-H特性曲線。對于固定形狀的柱形永磁體,在未接入磁路之前,單獨磁體的磁導(dǎo)曲線滿足:
(9)
式中:B為磁體內(nèi)部的磁感應(yīng)強度;H為磁體內(nèi)部的磁場強度;p為該永磁體的磁導(dǎo)系數(shù),與永磁體的形狀相關(guān);力矩馬達中使用的永磁體磁化方向長度為18 mm,截面為5.8 mm×5.6 mm,根據(jù)文獻[12]推導(dǎo)的公式,計算得到對應(yīng)的磁導(dǎo)系數(shù)p=10 H/m。
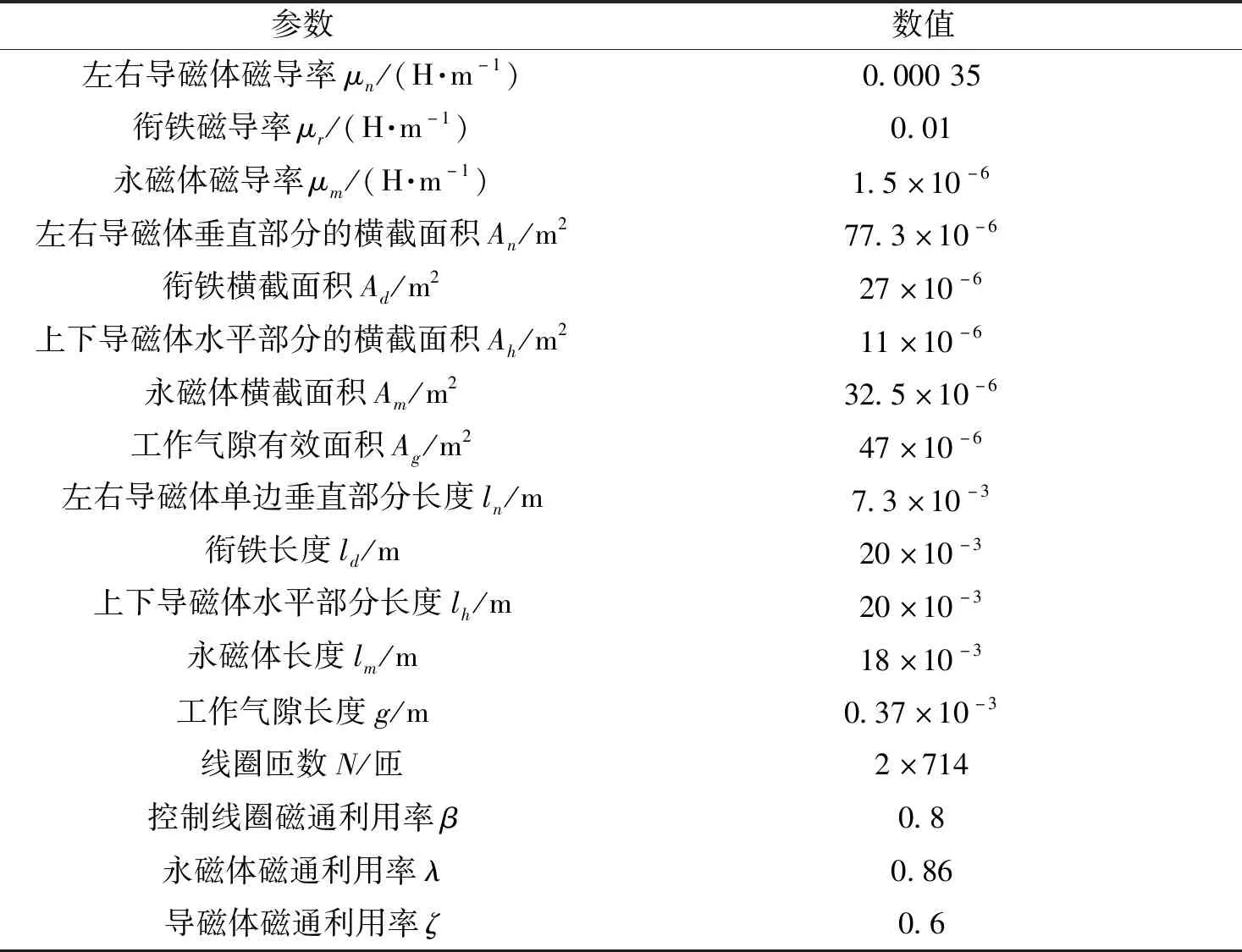
表1 某型電液伺服閥力矩馬達主要參數(shù)表Table 1 Main parameter list of a certain type of electro-hydraulic servo valve torque motor

圖5 永磁體退磁曲線示意Fig.5 Schematic diagram of permanent magnet demagnetization curve
單獨磁體磁導(dǎo)曲線與退磁曲線的交點E即為柱形永磁體接入磁路前的工作點,永磁體接入磁路后,其工作點沿回復(fù)特性曲線EF發(fā)生變動,回復(fù)特性曲線的斜率可近似用剩余磁感應(yīng)強度Br點處的切線的斜率來代替:
(10)

根據(jù)文獻[10]公式,結(jié)合永磁體的B-H曲線和單獨磁體磁導(dǎo)曲線,即可求得永磁體的總磁動勢:

(11)
總磁動勢是力矩馬達磁路模型中的關(guān)鍵參數(shù),直接用于式(6)中固定磁通的計算。
2 力矩馬達輸出特性
銜鐵受到的力矩是由于銜鐵兩側(cè)存在方向相反的電磁力。力矩馬達中銜鐵受電磁力的示意圖如圖6所示。根據(jù)麥克斯韋應(yīng)力方程,對于銜鐵末端無限小的作用面積ds,銜鐵所受到的電磁力矩為:
(12)
式中:a為銜鐵的等效旋轉(zhuǎn)半徑;B為氣隙處的磁感應(yīng)強度;H為氣隙處的磁場強度。
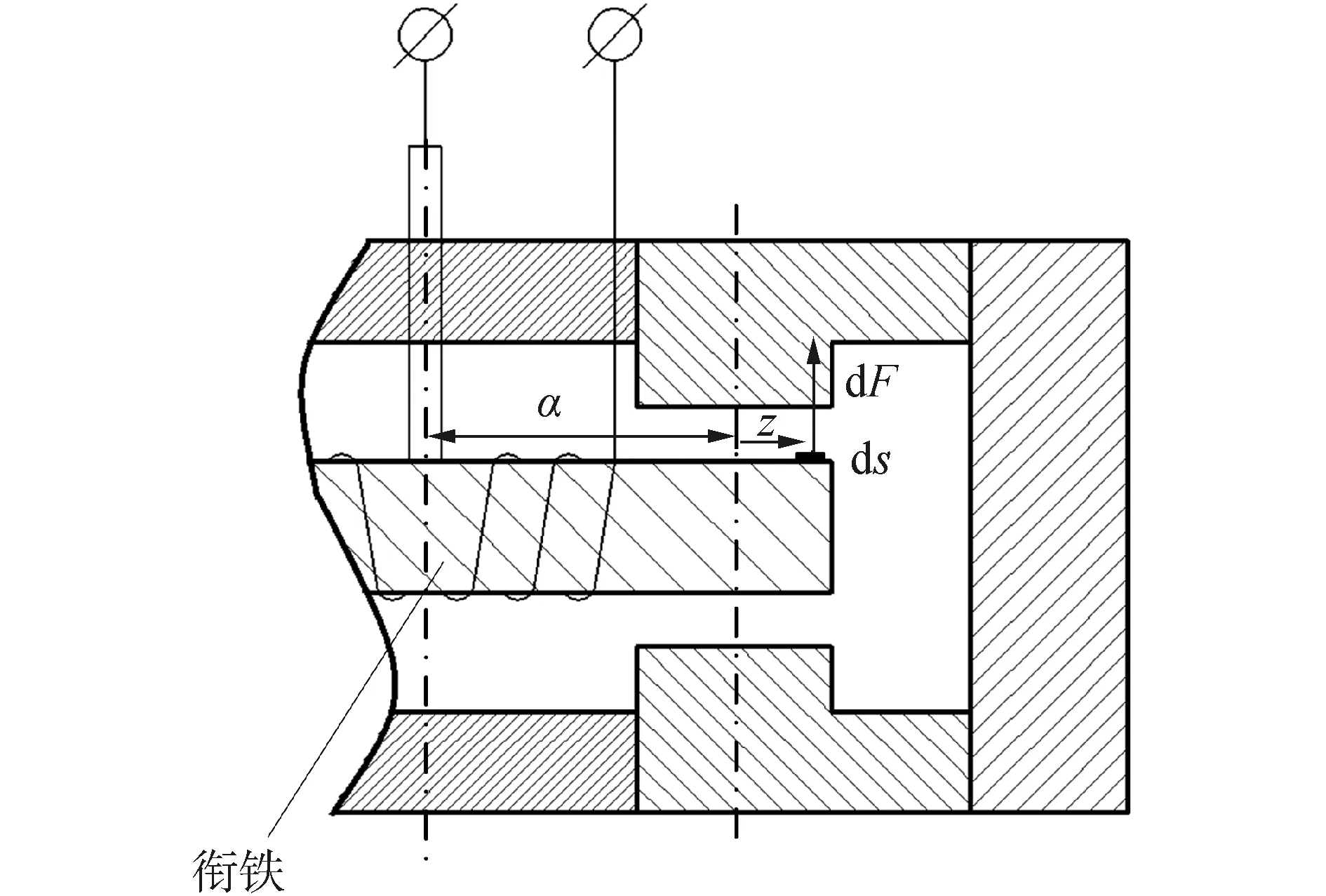
圖6 力矩馬達銜鐵受力示意Fig.6 Schematic diagram of the force of the torque motor armature
將式(11)在工作氣隙的有效面積上進行積分,并忽略z的影響,可得到某一工作氣隙處銜鐵所產(chǎn)生的力矩為:
(13)
由式(12)可知銜鐵受到的總力矩為:
(14)
根據(jù)式(4)、(5)可得:
(15)
(16)
將式(14)、(15)代入式(13)可得輸出力矩馬達輸出力矩表達式為:
(17)
將式(16)以輸入電流Δi和銜鐵轉(zhuǎn)角θ為自變量的二元函數(shù)進行線性化后,忽略高階無窮小項,上式可化簡為:
(18)
其中:
(19)
(20)
(21)
(22)
式中;Kt為永磁力矩馬達電磁力矩系數(shù);Km為永磁力矩馬達磁彈簧剛度;ξ、η為磁路中磁阻和漏磁對力矩馬達的影響系數(shù)。
銜鐵由彈簧管支撐,懸于上下導(dǎo)磁體工作氣隙之間。受電磁力矩作用而產(chǎn)生偏轉(zhuǎn),由于其與彈簧管組件剛性連接,所以也受到彈簧管回位力矩的作用:
(23)
式中:Ja為銜鐵擋板反饋桿組件的轉(zhuǎn)動慣量;Ba為銜鐵擋板反饋桿組件的阻尼系數(shù);Ka為彈簧管的剛度;TL為負載力矩。
在靜態(tài)空載時,力矩馬達的輸出電磁力矩與彈簧管的變形所產(chǎn)生的力矩相平衡,即:
KtΔi+Kmθ=Kaθ
(24)
(25)
若x/g<<1,φc/φg<<1,式(17)可簡化為:
Td=KtΔi+Kmθ
(26)
式(25)表明,當力矩馬達有電流輸入時,其輸出力矩驅(qū)動銜鐵轉(zhuǎn)動產(chǎn)生角位移,而該角位移又會造成輸出力矩增大,使銜鐵繼續(xù)轉(zhuǎn)動。對本文研究的力矩馬達而言,當銜鐵偏轉(zhuǎn)一個角度時,由彈簧管變形產(chǎn)生的力矩與電磁力矩平衡,使銜鐵停在某確定的角位移下,完成電-機械轉(zhuǎn)化任務(wù)。
若忽略工作氣隙和控制線圈處的漏磁,即ζ、β均為1,式(6)、(7)變?yōu)椋?/p>
(27)
(28)
若在此基礎(chǔ)上將導(dǎo)磁體的磁阻忽略,式(27)、(28)變?yōu)椋?/p>
(29)
可以看出,本文考慮了磁路中工作氣隙處和控制線圈處的漏磁,使磁路模型更加接近實際工況,理論上能更準確的反應(yīng)力矩馬達實際特性。
3 數(shù)值模擬分析及試驗驗證
3.1 數(shù)值模擬分析結(jié)果
為了驗證本文數(shù)學(xué)模型的可靠性,并進一步分析某型電液伺服閥力矩馬達在不同控制電流下的工作特性,采用低頻電磁場分析軟件Ansoft Maxwell考慮銜鐵、控制線圈、永磁體、導(dǎo)磁體等零件的微觀尺寸對其進行仿真分析。該軟件基于麥克斯韋微分方程,采用有限元離散形式,將力矩馬達和周圍空氣共同組成的求解域分割成很多小的區(qū)域,其中包含磁源和各處漏磁場,將工程中的電磁場計算轉(zhuǎn)化為龐大的矩陣求解,可準確的對力矩馬達中的磁場進行分析和計算。該軟件采用自適應(yīng)網(wǎng)格剖分,兼顧分析精度和分析速度,圖7是某型電液伺服閥力矩馬達的網(wǎng)格剖分圖,其中永磁體材料為LNG52,其剩余磁感應(yīng)強度Br為1.3T,矯頑力Hc為56 kA/m,最大磁能積為52 kJ/m3;導(dǎo)磁體和銜鐵的材料為1J50,其在0.4 A/m磁場強度中的磁導(dǎo)率μ0.4=3.1 mH/m,最大磁導(dǎo)率μm=49.5 mH/m,矯頑力Hc=14.4 A/m,飽和磁感應(yīng)強度Br=1.5 T;控制線圈的材料為銅,線圈內(nèi)部為絞線,線圈匝數(shù)N為714,兩線圈為并聯(lián)連接。為提高分析精度,永磁體和導(dǎo)磁體部分網(wǎng)格單元適當加密,單元最大邊長設(shè)為0.5 mm,控制線圈部分的網(wǎng)格單元最大邊長設(shè)為2 mm。
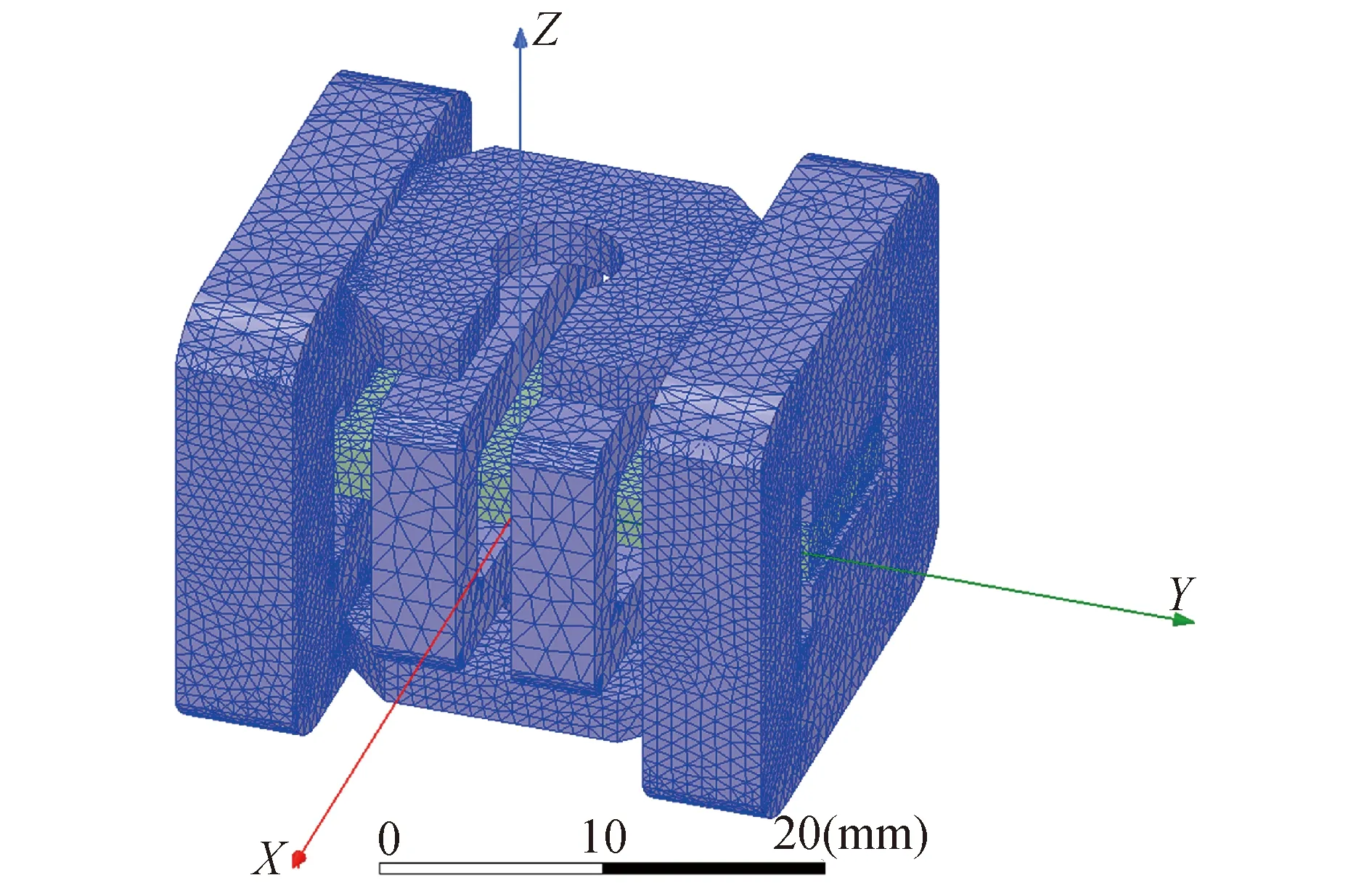
圖7 力矩馬達網(wǎng)格剖分圖Fig.7 Meshing diagram of torque motor
對力矩馬達中的控制線圈施加-100~100 mA變化的斜坡信號。圖8是在不同電流下,不同模型計算得到的氣隙磁感應(yīng)強度的對比圖,可以看出本文理論模型計算得到的氣隙磁感應(yīng)強度值更接近仿真計算值。圖9為各理論模型計算得到的輸出力矩與仿真計算結(jié)果之間的對比圖,在電流為100 mA時,各理論模型計算結(jié)果與數(shù)值計算結(jié)果之間的誤差分別為0.15%、4.8%和12.2%,可以看出本文所建立的理論模型具有更高的精度,尤其適用于大電流力矩馬達的設(shè)計制造中。
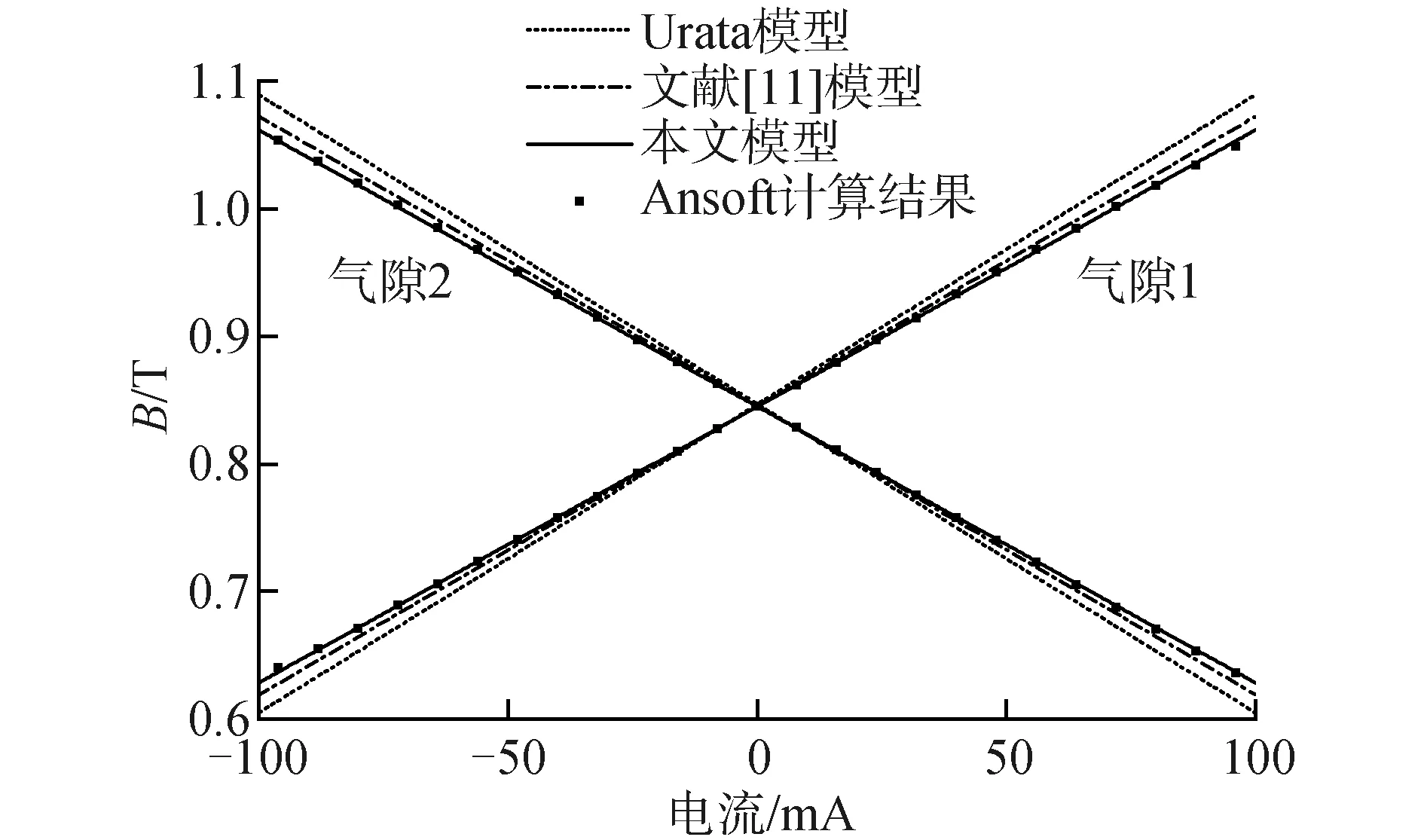
圖8 工作氣隙處磁感應(yīng)強度對比Fig.8 Comparison of magnetic induction intensity at working air gap
實際生產(chǎn)過程中,力矩馬達的的零位工作氣隙不可避免地存在一定誤差。文獻[13]將零位工作氣隙不相等情況分為垂直不平衡、左右不平衡和相對傾斜3種情況,并試驗證明零位氣隙存在垂直不平衡或左右不平衡對力矩馬達的力矩特性影響較小,而零位氣隙相對傾斜會影響力矩馬達輸出的力矩值,但不影響其比例特性。文獻[14]證明當氣隙上下對稱或左右對稱時,電液伺服閥無零偏;而氣隙相對傾斜或單個氣隙存在誤差時,伺服閥存在較大零偏。因此為了驗證本文理論模型在實際工況中的適用情況,只需在零位工作氣隙相對傾斜的情況下,將輸出力矩的理論計算值與仿真計算值進行對比,即可驗證本文理論模型在實際工況中的適用性和精確性。圖10為銜鐵初始角位移分別為0.1°、0.2°時各模型得到的理論計算結(jié)果與仿真計算結(jié)果的對比圖。可以看出本文所建立的模型相比其他模型能更準確的描述力矩馬達在實際工況中的輸出特性。據(jù)理論模型中假設(shè),當銜鐵順時針偏離中位,偏轉(zhuǎn)角度為θ時,工作氣隙1、3的長度減小x,氣隙2、4增加x,x=aθ,即近似認為工作氣隙的上下端面仍是平行的。而實際工作過程中,若銜鐵發(fā)生偏轉(zhuǎn),工作氣隙的上下端面將不再平行,現(xiàn)有的氣隙磁阻理論計算公式將不再適用,所以當銜鐵存在初始偏轉(zhuǎn)角度時,理論計算結(jié)果與仿真計算結(jié)果將會產(chǎn)生一定誤差,且該誤差隨銜鐵偏轉(zhuǎn)角度的增加而增加。
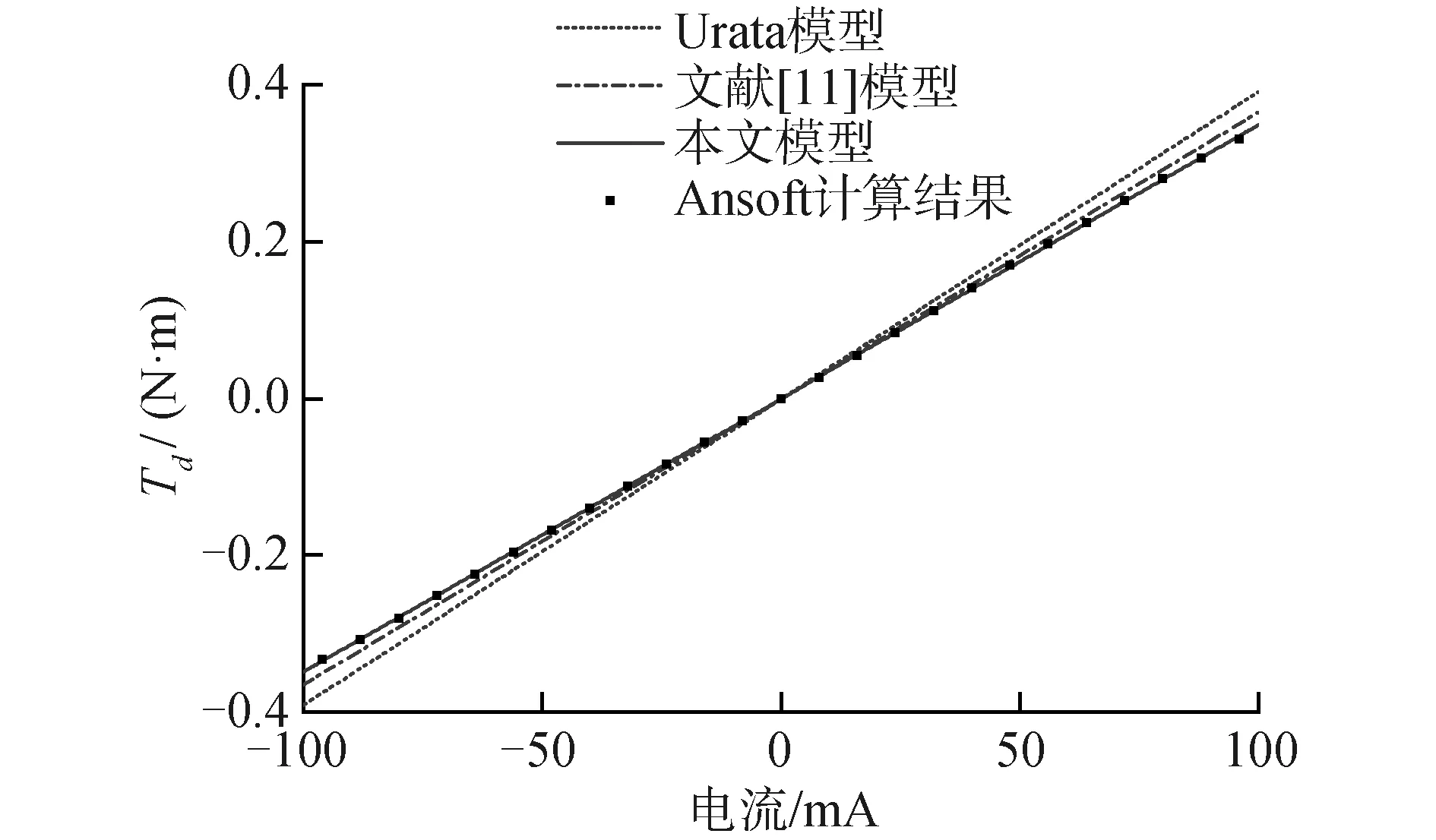
圖9 銜鐵輸出力矩對比Fig.9 Comparison of the output torque of armature
3.2 試驗驗證結(jié)果
為了驗證本文建立的磁路模型的準確性,將文獻[11]中的力矩馬達作為應(yīng)用對象,根據(jù)已知參數(shù)計算得到各氣隙的磁感應(yīng)強度,并對計算結(jié)果進行對比分析,如表2所示。

表2 氣隙磁感應(yīng)強度試驗值與理論計算值的對比Table 2 Comparison of experimental values and theoretical valves of magnetic induction in working air gap (N=1 050,Δi=10 mA)
通過表2可以看出,本文建立的磁路模型得到的計算結(jié)果相比其他理論模型具有更高的精度,證明考慮磁路漏磁對力矩馬達模型精度提升的有效性。理論結(jié)果可用于力矩馬達特性的精確描述,指導(dǎo)力矩馬達的設(shè)計與優(yōu)化。
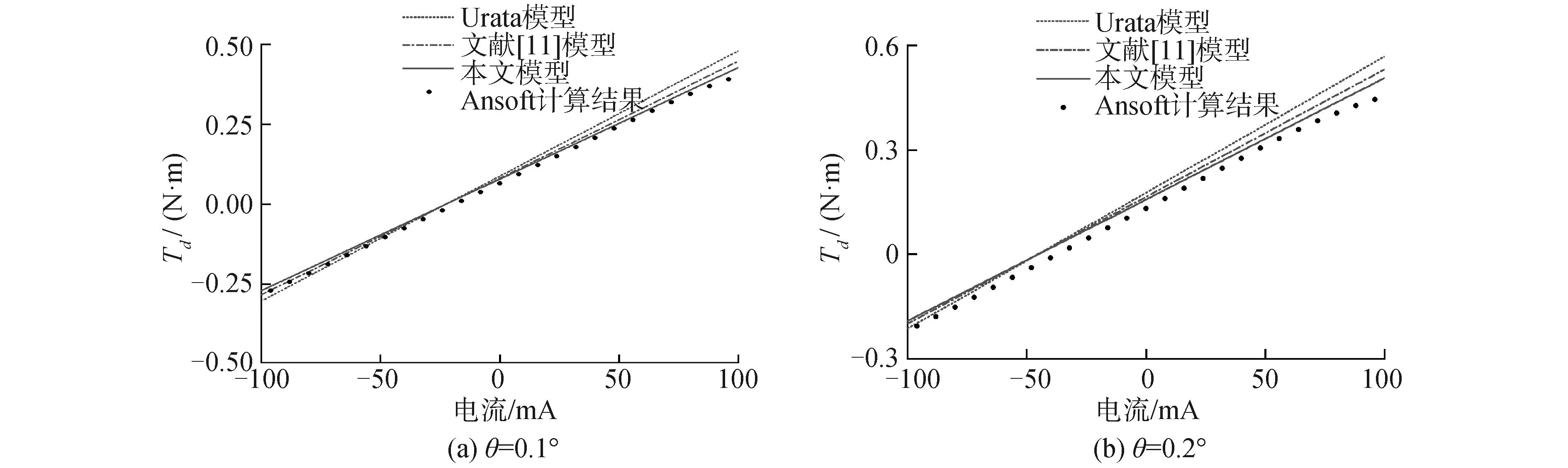
圖10 銜鐵存在初始角位移時的輸出力矩對比Fig.10 Comparison of the output torque when the armature has initial angular displacement
4 結(jié)論
1)永磁體產(chǎn)生的磁通遠大于工作氣隙實際利用的磁通,永磁體的漏磁效應(yīng)在力矩馬達的磁路分析中不可忽略。
2)本文在考慮永磁體漏磁、磁阻,以及導(dǎo)磁體磁阻的基礎(chǔ)上,進一步考慮了磁路中工作氣隙和控制線圈處的漏磁影響,使理論模型更接近實際工況,仿真對比和試驗對比均證明本文所建立數(shù)學(xué)模型的正確性以及考慮磁路漏磁對力矩馬達模型精度提升的有效性。