
基于ARM反饋智能變量噴藥控制系統研究
2020-03-27 12:15:16張明宇劉峰鄭永鑫王強宋爽孫鴻
農業與技術 2020年3期
張明宇 劉峰 鄭永鑫 王強 宋爽 孫鴻
摘要:為了實現變量施藥和確保噴施效果,開展了基于ARM反饋的變量噴藥控制系統的研究。該系統需要車載ARM控制器為核心,采用北斗導航系統獲取車速,通過CAN總線獲取噴嘴的流量和壓力等信息。系統可以在線處理數據并發送功能代碼到驅動電路,在脈沖寬度調制下根據輸入用戶的需要來實現比例電動調節閥的開閉量,最終基于作業行駛速度來改變噴藥量的變化。試驗結果表明,車輛的速度為5~11km/h,該系統變量的控制誤差較小,不超過5%,滿足變量噴藥的操作要求。
關鍵詞:變量噴藥;控制系統;CAN總線;精準農業
中圖分類號:S22
文獻標識碼:A
DOI:10.19754/j.nyyjs.20200215018
收稿日期:2019-11-07
作者簡介:張明宇(1980-),男,本科,高級工程師。研究方向:農業工程及節水灌溉。
導言
農藥是農業生產力的重要生產資料,但是,過多的投入容易導致環境污染和資源浪費。2015年,中國農藥使用量為178.3萬t,農藥使用率為36.6%[1],低于發達國家平均50%[2,3]。因此,農藥使用的主要需求從廣泛的投入轉移到適度,按需和按需定量投入[4]。
變量噴藥技術源于精準農業的理念,是一種農業機械利用農田信息的技術,結合其目前的速度和位置自動調整農藥投入量[5]。傳統的基于噴霧的壓力控制技術通過調節系統壓力實現變量噴藥。大量實驗表明,液滴直徑隨壓力的變化非常顯著,該方法的流量控制將失去噴霧性能[6,7]。脈沖寬度調制是一種可變速率噴霧技術,電磁閥安裝在噴射器的入口處,通過改變輸入信號的占空比來控制電磁閥的間歇打開和關閉,從而實現變量噴藥[8],但是,需要高頻響應和電動閥的可靠性[9]。可變速噴灑在線混合農藥是一種及時改變化學品濃度的技術,以實現變量噴藥。由于這種方法改變了水和農藥的比例,因此對系統壓力和流量的影響很小[10]。然而,由于液體藥物的液體流速很小,這種控制方法要求高精度,并且存在一定的系統延遲。
1 變量噴藥控制系統的工作原理
在噴灑過程中每公頃施用的農藥量為R(L/hm2)計算公式為:
R=60000Q/Dv(1)
式中:Q為噴嘴瞬時流量,L/min;D為有效噴藥寬度,m;v為作業速度,m/s。
在噴藥機的實際操作中,有效噴藥寬度是一定值;噴嘴瞬時流量Q與車輛的瞬時速度v成比例。因此,為了確保R達到預期值,必須確保Q和v在每個時刻具有不一致和成比例的關系。
本文設計的ARM反饋的變量噴藥控制系統使用北斗采集的車輛的速度值v,根據計算目標流量QT,并通過流量傳感器獲得當前流量QM。QM等于反饋值。根據反饋值,控制器采取適當的策略改變比例電動閥的開度,從而改變管道內的液體流量,直到QT等于QM,并最終實現變量噴藥操作。
為了保證良好的霧化效果,機組噴頭錐角有一定的要求。普通噴嘴是110°雙扇形噴嘴的霧角。基于基本要求,噴嘴間距大于或等于50cm,而噴桿高度通常比頂部高50cm。
有效噴灑寬度D(m)=[(m-1)L+2htanα] (2)
式中:m為噴嘴數量;L為相鄰的2個噴嘴間距,m;h為噴嘴離地高度,m;α為噴嘴噴射角度。
2 系統硬件組件
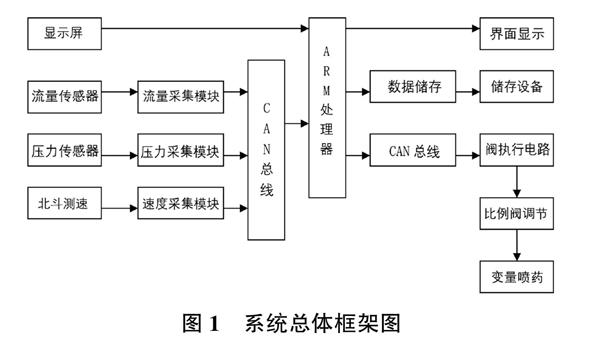
2.1 系統總體框架
變量噴藥控制系統的總體框架如圖1所示。變量噴藥控制系統的主要結構是車載ARM控制器,CAN采集模塊,CAN頻率采集模塊,速度傳感器,流量傳感器,壓力傳感器和比例電動調節閥。
2.2 ARM處理器
三核Exynos4412是四核CORTEX-A9架構處理器,被選為系統的核心處理器。采用Ubuntu14.04LTS作為操作系統,選擇車速、管道流量、噴嘴壓力等信號,計算出當前速度的理論噴藥量,比較反饋信號,輸出電動調節閥控制信號并存儲實時數據。ARM處理器的外圍電路包括Console串口、標準CAN2.0總線接口、標準HDMI接口和LCD擴展槽,用于調試、通信和顯示。
2.3 傳感器
2.3.1 流量傳感器
采用渦輪電磁流量計進行流量采集,精度為±0.5級,測量范圍為0~5m3/h,輸出信號為隔離4~20mA電流信號。根據安裝標準將電磁流量計安裝在主管上,以測量系統中的液體流量。流量是用于反饋調節的可變噴藥系統的主要參數之一。
2.3.2 壓力傳感器
使用壓力傳感器進行采集工作時的噴嘴壓力,測量范圍為0~5Mpa,輸出信號為4~20mA電流信號,檢測精度為±0.2%。擴散硅壓力變送器安裝在一般管道中,噴嘴前面和流量傳感器后面的三通連接處,用于測量噴嘴處的壓力值。在使用扇形的棕色噴嘴(No.5噴嘴)情況下,霧化效果更好,為0.2~0.5Mpa。因此,影響噴霧效果的噴嘴壓力是在噴霧系統中收集的重要參數之一。
2.3.3 獲取模塊
采集模塊用于采集傳感器信號并將其轉換為CAN信號,信號通過CAN總線發送到ARM控制器。有速度采集模塊、流量模擬采集模塊和壓力測量模塊,模塊安裝時附帶適當的傳感器。
2.3.4 比例電動調節閥
比例電動調節閥由閥體和直流調速電機組成。操作閥體閥芯改變其行程以改變通過閥體的最大流量,閥門的百分比流量與行程百分比成正比,閥馬達的速度為3RPM,從完全關閉到完全打開只需5~6s。
3 變量噴藥控制方法
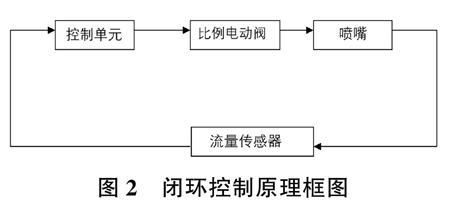
如圖2為系統閉環控制的框圖。在反饋調節中,反饋和延遲的測量精度對閉環系統的特性有顯著影響。根據變量噴藥控制系統的工作原理,反饋值由車速v和電流QM決定。選擇合適的電磁流量計,以提高流量測量的準確性,減少電流測量過程中的響應時間。由于車輛的測量延遲可以忽略不計,系統延遲主要來自電動閥的調節。因此,控制器選擇脈沖寬度調制策略以減少由閥門延遲引起的穩定時間。
4 系統軟件設計
4.1 技術路線設計
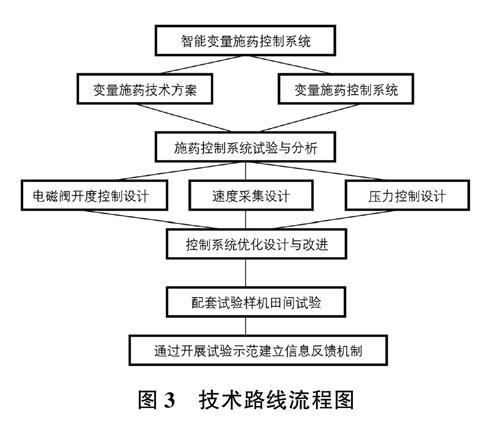
如圖3所示,吸取國內外先進經驗與創新思想,采用理論與實踐,實驗室研究與田間試驗考核,產品開發、中試試驗與示范推廣緊密結合的方法,以智能變量噴藥控制系統入手,按照確定的技術路線進行電磁閥開度控制、速度采集試驗、壓力控制研究與設計,并進行試制及試驗示范。
4.2 通信協議的設計
車載ARM控制器、CAN采集模塊及傳感器等核心部件均通過CAN總線網絡連接。CAN總線物理層和數據鏈路層符合CAN2.0B標準幀協議(CAN2.0兼容)。設計的功能代碼在應用層消息的11位標識符中定義。ARM采用的Ubuntu操作系統使用Socket CAN來實現CAN總線通信。應用層主要功能代碼的設計如表1所示。
圖4為軟件的界面,顯示了主噴霧噴嘴壓力、車速、流量信息、噴嘴數量、間距及工作狀態。功能鍵包括參數設置,自動、手動模式,噴桿角度設置,噴桿上升、下降,噴桿展開、收起。界面可以方便地監測噴藥機的運行狀況,特殊情況下可以模擬打藥模式。
5 測試與分析
不同速度的變量噴藥操作試驗:
所需的噴霧量R設定為300L/hm2,噴嘴的數量m為51,間距為50cm,地面間隙等于80cm。噴藥機以不同的速度連續工作1min(不同的速度測試彼此獨立,每個測試以零速開始),噴射的水量與噴霧量一樣。根據存儲在ARM中的操作數據,獲得表2。
從表2可以看出,當車速為5~7km/h時,實際噴藥量略大于理論噴藥量;當車速為8~11km/h時,實際噴藥量略小于理論噴藥量。重復測試和觀察,得出以下分析:當速度超過8km/h時,管道壓力相對較大,回流閥起到穩定壓力和限制最大壓力的作用,將產生回流,導致噴嘴壓力降低,使實際噴霧量略低于理論值。 當速度慢時,噴射量很小,而回流閥不起作用,泵提供的壓力集中在噴嘴中,使實際噴霧略高于理論值。但是,在不同的速度下,系統不會超過噴藥過程中噴藥誤差百分比的5%。
6 結論和展望
基于CAN總線的變量噴藥控制系統以ARM處理器為核心設計與建立。控制系統接口旨在實現狀態監控,自動變量控制和手動校正,以及作業數據存儲功能;
根據變量噴藥操作測試,可以得出結論:變量噴藥系統的控制誤差小于5%。穩定時間小于0.77s。并且滿足可變噴藥操作要求。
GPS定位技術等定位技術可應用于系統。因此,系統可以根據位置和處方圖信息實時改變預期噴霧量R,從而實現根據處方圖的可變噴霧操作。此外,可以在系統中增加DTU模塊等長距離通信手段,實現數據的遠程交互和變量噴藥的遠程控制。
參考文獻
[1] 李志臣,饒洪輝,王勇,等.除草劑變量施藥技術的研究現狀與進展[J].東北農業大學學報,2007(04):563-567.
[2] 傅澤田,祁力鈞,王俊紅.精準施藥技術研究進展與對策[J].農業機械學報,2007(1):189-192.
[3] 王利霞,張書慧,馬成林,等.基于ARM的變量噴藥控制系統設計[J].農業工程學報,2010,26(4):113-118.
[4]邱白晶,閆潤,馬靖,等.變量噴霧技術研究進展分析[J].農業機械學報,2015,46(3):59-72.
[5] 魏新華,蔣杉,張進敏,等.脈寬調制間歇噴霧變量噴施系統施藥量控[J].農業機械學報,2013,44(2):87-92,86.
[6] 蔣煥煜,周鳴川,童俊華,等.卡爾曼濾波的PWM 變量噴霧控制研究[J].農業機械學報,2014,45(10):60-65.
[7] 劉偉,汪小旵,丁為民,等.背負式噴霧器變量噴霧控制系統設計與特性分析[J].農業工程學報,2012,28(9):16-21.
[8] 蔡祥,Walgenbach Martin,Doerpmund Malte,等.基于電磁閥的噴嘴直接注入式農藥噴灑系統[J].農業機械學報,2013,44(6): 69-72.
[9] 趙欣,張寶珍,賴維,等.針型噴嘴霧化特性的影響因素分析[J].輕工機械,2004(4):22-24.
[10] 李龍龍,何雄奎,宋堅利,等.果園仿形變量噴霧與常規風送噴霧性能對比試驗[J].農業工程學報,2017,33(16):56-63.
(責任編輯 周康)
