光纖陀螺捷聯(lián)慣導(dǎo)系統(tǒng)艇上系泊狀態(tài)自標(biāo)定方法
2020-04-08 04:52:30萬(wàn)少巍王激揚(yáng)
激光與紅外 2020年3期
劉 凱,萬(wàn)少巍,王激揚(yáng),于 峰
(1.北京航天控制儀器研究所,北京 100039;2.海軍裝備部,北京 100163;3.91550部隊(duì),遼寧 大連 116023)
1 引 言
目前國(guó)內(nèi)對(duì)慣導(dǎo)系統(tǒng)標(biāo)定方法的研究主要集中在分立式標(biāo)定,并在工程中得到應(yīng)用。但在實(shí)際應(yīng)用中分立式標(biāo)定方法對(duì)轉(zhuǎn)臺(tái)精度要求較高,轉(zhuǎn)位過(guò)程復(fù)雜,且當(dāng)慣導(dǎo)系統(tǒng)安裝在艇上或彈上后無(wú)法實(shí)現(xiàn)在線自標(biāo)定,必須依靠定時(shí)拆卸返回廠家完成標(biāo)定任務(wù),造成了使用的極大不方便。而采用系統(tǒng)級(jí)標(biāo)定方法通過(guò)設(shè)計(jì)合理的轉(zhuǎn)位路徑,利用導(dǎo)航誤差計(jì)算器件誤差,可避免對(duì)高精度轉(zhuǎn)臺(tái)的依賴(lài)。
近年來(lái)帶轉(zhuǎn)位機(jī)構(gòu)的捷聯(lián)慣導(dǎo)系統(tǒng)受到了廣泛重視,系統(tǒng)級(jí)自標(biāo)定方法的研究成為研究熱點(diǎn)。國(guó)內(nèi)的研究人員也提出了多種系統(tǒng)級(jí)標(biāo)定方法:吳賽成[1]提出了一種基于Kalman濾波的27維誤差參數(shù)標(biāo)定模型,并設(shè)計(jì)了轉(zhuǎn)位方案;江奇淵[2]提出了一種考慮加速度計(jì)二次項(xiàng)誤差和內(nèi)桿臂誤差的標(biāo)定方法;石文峰[3]設(shè)計(jì)了一種10位置系統(tǒng)級(jí)標(biāo)定方法,并利用簡(jiǎn)化的誤差模型和速度誤差變化率方程,建立了誤差參數(shù)與導(dǎo)航誤差的關(guān)系,上述方案均要求慣導(dǎo)系統(tǒng)處于靜基座條件下,在系泊條件下無(wú)法使用上述標(biāo)定方案。楊玉孔[4]提出了一種針對(duì)艦船在系泊或錨泊條件下的在線標(biāo)定方法,但該方法無(wú)法實(shí)現(xiàn)自標(biāo)定,仍需依靠GPS等外部設(shè)備提供外界輸入條件;袁鵬[5-6]提出了一種系泊狀態(tài)下的全參數(shù)自標(biāo)定方案,該方案采用低通濾波對(duì)解算的速度誤差進(jìn)行分解,由于海浪頻率較低,采用低通濾波時(shí)不可避免會(huì)引入相位延遲,導(dǎo)致濾波后的速度有較大誤差,無(wú)法滿足標(biāo)定精度,并且該標(biāo)定方案無(wú)法標(biāo)定慣導(dǎo)系統(tǒng)的內(nèi)桿臂參數(shù),這在動(dòng)基座條件下對(duì)最終導(dǎo)航精度有較大影響。
本文根據(jù)實(shí)際使用條件,提出了一種15位置的動(dòng)基座自標(biāo)定方案。該標(biāo)定方案在同時(shí)具有角運(yùn)動(dòng)和線運(yùn)動(dòng)干擾下,可標(biāo)定出陀螺儀和加速度計(jì)的零偏,標(biāo)度因數(shù)誤差,安裝誤差等誤差參數(shù)的基礎(chǔ)上,增加了加速度計(jì)正負(fù)通道非對(duì)稱(chēng)性誤差和內(nèi)桿臂參數(shù)。該方法在不借助外界高精度設(shè)備的情況下,利用自身轉(zhuǎn)位機(jī)構(gòu)實(shí)現(xiàn)轉(zhuǎn)位控制,完成在艇上動(dòng)基座條件下的自標(biāo)定任務(wù)。標(biāo)定出的誤差參數(shù)滿足高精度慣導(dǎo)系統(tǒng)的要求。
2 慣導(dǎo)系統(tǒng)誤差模型
2.1 慣性器件誤差模型
帶轉(zhuǎn)位機(jī)構(gòu)的光纖陀螺捷聯(lián)慣導(dǎo)系統(tǒng)由3個(gè)光纖陀螺,3個(gè)石英加速度計(jì),軸端角度傳感器及電機(jī)組成。這里主要針對(duì)光纖陀螺和石英加速度計(jì)的零偏、標(biāo)度因數(shù)誤差、安裝誤差、加速度計(jì)非對(duì)稱(chēng)系數(shù)誤差及內(nèi)桿臂誤差等誤差項(xiàng)進(jìn)行建模。
定義以載體坐標(biāo)系b系(Oxb,yb,zb)為參考坐標(biāo)系,令X加速度計(jì)敏感軸與載體坐標(biāo)系的Oxb軸重合,Y加速度計(jì)敏感軸在Oxbyb平面內(nèi),Z加速度計(jì)與X加速度計(jì)、Y加速度計(jì)敏感軸組成右手直角坐標(biāo)系,這樣可將6個(gè)安裝誤差簡(jiǎn)化為3個(gè)安裝誤差角[7]。則加速度計(jì)輸出的誤差模型為:
(1)
陀螺儀誤差模型為:
(2)
2.2 系統(tǒng)誤差方程
選取東北天坐標(biāo)系為導(dǎo)航坐標(biāo)系n系,本文不加推導(dǎo)的直接給出系統(tǒng)姿態(tài)誤差方程為:
(3)
速度誤差方程為:
(4)
位置誤差方程為:

3 系泊條件下的速度誤差獲取
在系泊狀態(tài)下對(duì)艦艇的角運(yùn)動(dòng)及線運(yùn)動(dòng)情況進(jìn)行數(shù)據(jù)采集,并對(duì)采集數(shù)據(jù)進(jìn)行分析可知,艇體水平方向的最大變化量為0.18 m,頻率約為0.059 Hz;升沉方向的最大變化量為0.15 m,頻率約為0.071 Hz。艇體的角運(yùn)動(dòng)通過(guò)FFT分析可知,每個(gè)方向主要由3個(gè)正弦波疊加而成,縱搖角最大幅值為1.1°,頻率約為0.083 Hz;橫搖角最大幅值為2.8°,頻率約為0.067 Hz;偏航角最大幅值為0.48°,頻率約為0.083 Hz。
通過(guò)對(duì)艇體運(yùn)動(dòng)數(shù)據(jù)進(jìn)行分析可知,在系泊條件下的線運(yùn)動(dòng)幅值相對(duì)較小,頻率在0.05 Hz以上,而真實(shí)速度相對(duì)于速度誤差是高頻分量,可以采用濾波手段對(duì)艇體線運(yùn)動(dòng)信息進(jìn)行剔除。首先設(shè)計(jì)IIR低通濾波器,令通帶截止頻率為0.01 Hz,阻帶截止頻率為0.05 Hz,通帶最大衰減為1 dB,阻帶最小衰減為80 dB。設(shè)計(jì)的低通濾波器能將外界帶來(lái)的線運(yùn)動(dòng)濾除掉,但是由于阻帶截止頻率過(guò)低,濾波的同時(shí)不可避免會(huì)造成相位延遲,經(jīng)仿真分析帶來(lái)的延遲超過(guò)100 s,這對(duì)于標(biāo)定來(lái)說(shuō)是不可接受的。
針對(duì)在處理解算速度使用的濾波器引起相移問(wèn)題[8],提出了使用零相移低通濾波器對(duì)解算速度進(jìn)行處理。零相位數(shù)字濾波的方法是先將信號(hào)正向通過(guò)濾波器,將正向?yàn)V波所得結(jié)果進(jìn)行時(shí)域翻轉(zhuǎn)后再次通過(guò)濾波器,得到二次濾波結(jié)果,再將二次濾波結(jié)果再次進(jìn)行時(shí)域翻轉(zhuǎn),可得到零相移的信號(hào)[9]。零相位數(shù)字濾波器在頻域內(nèi)的描述為:
(6)
其中,X(ejω)為輸入信號(hào);H(ejω)為所用的數(shù)字濾波器沖擊響應(yīng)序列;Y2(ejω)為進(jìn)行時(shí)域翻轉(zhuǎn)后的信號(hào);Y3(ejω)為第二次濾波后的信號(hào);Y4(ejω)為第二次濾波結(jié)果再進(jìn)行時(shí)域翻轉(zhuǎn)的信號(hào)。
由上述公式可得:
Y(ejω)=X(ejω)|H(ejω)|2
(7)
由此可見(jiàn),輸出Y(ejω)與輸入X(ejω)不存在附加相位。
為驗(yàn)證設(shè)計(jì)的零相位低通濾波器,對(duì)某型慣導(dǎo)系統(tǒng)在系泊狀態(tài)下的速度輸出進(jìn)行IIR低通濾波和零相位濾波處理,可以看出使用零相位濾波的速度誤差基本沒(méi)有相位延遲,而采用IIR低通濾波器的速度誤差相位滯后明顯,必然會(huì)造成標(biāo)定結(jié)果不準(zhǔn)確,圖1表示在不同濾波器下的速度誤差。
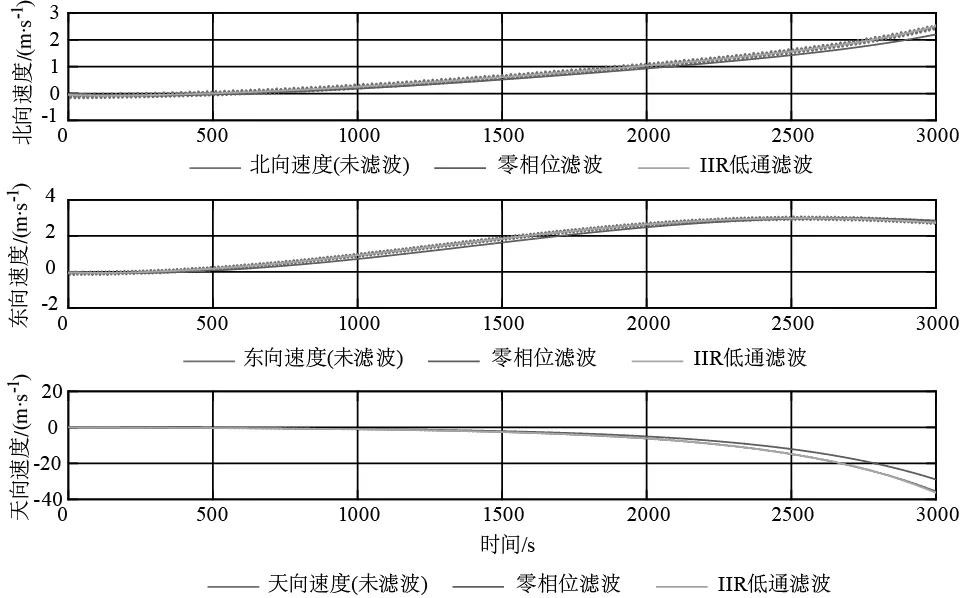
圖1 不同濾波器下的速度誤差
由圖1可知,零相位濾波相對(duì)IIR低通濾波器來(lái)說(shuō),在相位上沒(méi)有延遲,且能將真實(shí)速度從解算速度中率除掉,得到由器件誤差引起的速度誤差。通過(guò)比較可以發(fā)現(xiàn),采用IIR低通濾波器與零相位濾波器得到的速度誤差之差最大可達(dá)7.4185 m/s,這對(duì)于標(biāo)定出精確的誤差參數(shù)來(lái)說(shuō)明顯過(guò)大,故采用零相位濾波器能得到更好的結(jié)果。
4 濾波器設(shè)計(jì)
考慮慣導(dǎo)系統(tǒng)中的所有誤差參數(shù),包括陀螺和加速度計(jì)的零偏,標(biāo)度因數(shù)誤差,安裝誤差,加速度計(jì)非對(duì)稱(chēng)誤差,內(nèi)桿臂誤差以及系統(tǒng)的失準(zhǔn)角,速度誤差和位置誤差共36維,選取的狀態(tài)變量如下式所示:
(8)
通過(guò)對(duì)解算的速度進(jìn)行濾波后,則導(dǎo)航解算誤差可得由慣性器件誤差引起,選取濾波后的速度誤差為觀測(cè)量,故:
Z=[δVEδVNδVU]T
(9)
根據(jù)前面推導(dǎo)的誤差方程,可得系統(tǒng)的狀態(tài)方程為:
(10)
其中,矩陣F可根據(jù)公式(1)~(5)得到,w為36×1維的零均值白噪聲。
系統(tǒng)量測(cè)方程為:
Z=HX+v
(10)
其中,H=[03×3I3×303×30];v為3×1維的零均值白噪聲。
5 標(biāo)定路徑設(shè)計(jì)及可觀測(cè)性分析
采用帶雙軸轉(zhuǎn)位機(jī)構(gòu)的捷聯(lián)慣導(dǎo)系統(tǒng),便于在系泊狀態(tài)實(shí)現(xiàn)轉(zhuǎn)位控制,可有效激勵(lì)出慣性器件的所有誤差項(xiàng)。根據(jù)轉(zhuǎn)位機(jī)構(gòu)的特點(diǎn),現(xiàn)設(shè)計(jì)一15位置自標(biāo)定方案。為了保證所設(shè)計(jì)的標(biāo)定路徑能激勵(lì)出慣性器件所有誤差項(xiàng),需要系統(tǒng)完全可觀測(cè)。
利用PWCS手段對(duì)系統(tǒng)的可觀測(cè)性進(jìn)行分析,該方法將線性時(shí)變系統(tǒng)所提取的可觀測(cè)矩陣代替系統(tǒng)總的可觀測(cè)矩陣來(lái)分析可觀測(cè)性,可簡(jiǎn)化分析過(guò)程,便與實(shí)際應(yīng)用。根據(jù)設(shè)計(jì)的Kalman濾波方程可知,當(dāng)在每個(gè)位置Rank(Qs(r))為滿秩,則系統(tǒng)完全可觀測(cè)。根據(jù)設(shè)計(jì)的轉(zhuǎn)位路徑進(jìn)行分析,可得在不同位置下系統(tǒng)的秩如表1所示。
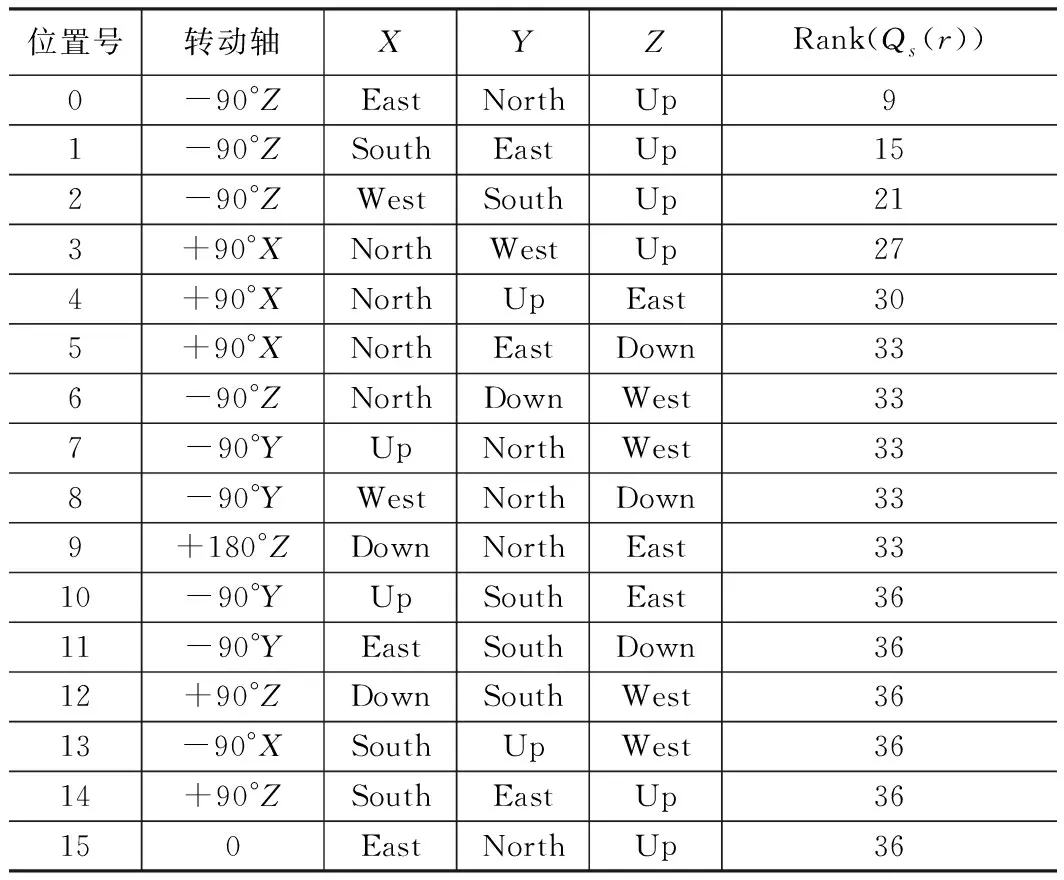
表1 轉(zhuǎn)動(dòng)次序
從表1可以看出,經(jīng)過(guò)15位置后,系統(tǒng)的秩達(dá)到滿秩,這說(shuō)明所建立的誤差方程中的誤差系數(shù)是完全可觀測(cè)的。
6 仿真及實(shí)驗(yàn)驗(yàn)證
6.1 仿真驗(yàn)證
為模擬真實(shí)系泊狀態(tài)下艇體的運(yùn)動(dòng)環(huán)境,根據(jù)已采集的海浪條件,經(jīng)過(guò)FFT分析可得到海浪的運(yùn)動(dòng)條件。按照實(shí)際條件設(shè)置仿真條件,角運(yùn)動(dòng)條件如下:
(11)
線運(yùn)動(dòng)條件為:
(12)
標(biāo)定的總時(shí)長(zhǎng)為5400 s,每個(gè)位置所在的時(shí)間均等。按照標(biāo)定路徑設(shè)置仿真條件,以及陀螺儀和加速度計(jì)的輸出,并采用多次迭代的方法而到最終標(biāo)定結(jié)果,表2仿真結(jié)果對(duì)比表。
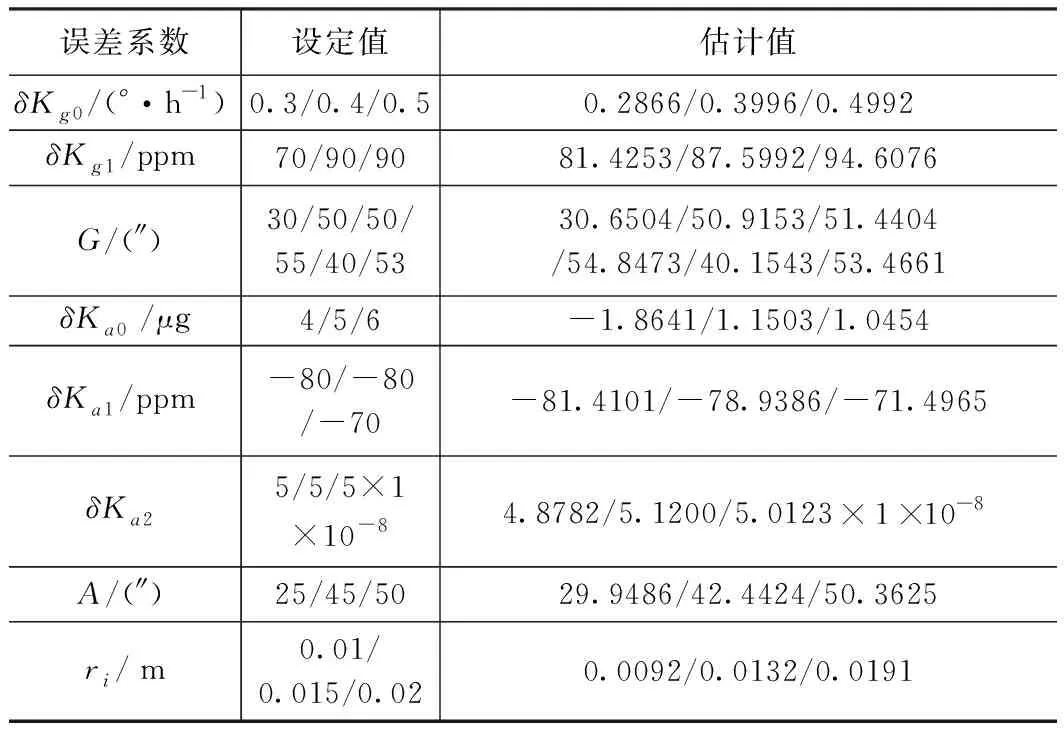
表2 仿真結(jié)果對(duì)比
從表2可以看出,陀螺儀零偏估計(jì)精度優(yōu)于0.015°/h,標(biāo)度因數(shù)估計(jì)精度優(yōu)于5 ppm,安裝誤差估計(jì)精度優(yōu)于1.5″,加速度計(jì)零偏估計(jì)精度優(yōu)于5 μg,標(biāo)度因數(shù)估計(jì)精度優(yōu)于2 ppm,加速度計(jì)非對(duì)稱(chēng)誤差估計(jì)精度優(yōu)于2×10-9,安裝誤差估計(jì)精度優(yōu)于5”,內(nèi)桿臂誤差優(yōu)于0.002 m。各誤差系數(shù)收斂結(jié)果如圖2~7所示,各誤差項(xiàng)在最后一次迭代時(shí)均已收斂到零,已將各誤差項(xiàng)估計(jì)出來(lái)。

圖2 陀螺儀零偏估計(jì)結(jié)果
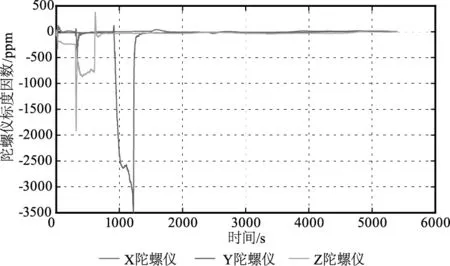
圖3 陀螺儀標(biāo)度因數(shù)誤差估計(jì)結(jié)果
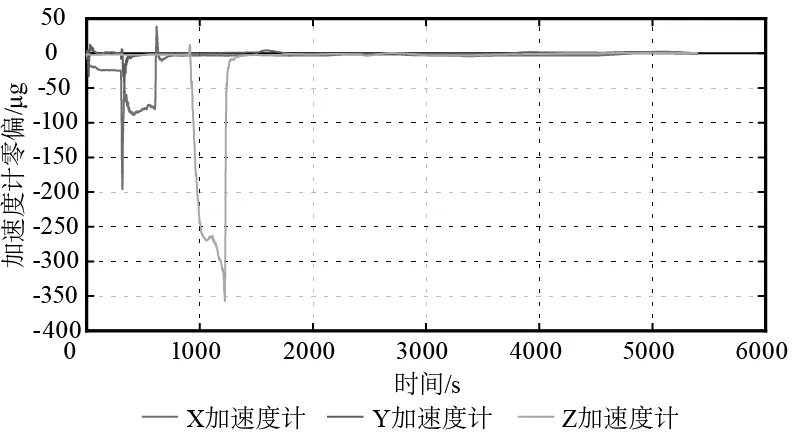
圖4 加速度計(jì)零偏估計(jì)結(jié)果
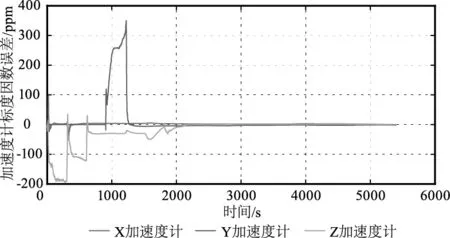
圖5 加速度計(jì)標(biāo)度因數(shù)誤差估計(jì)結(jié)果
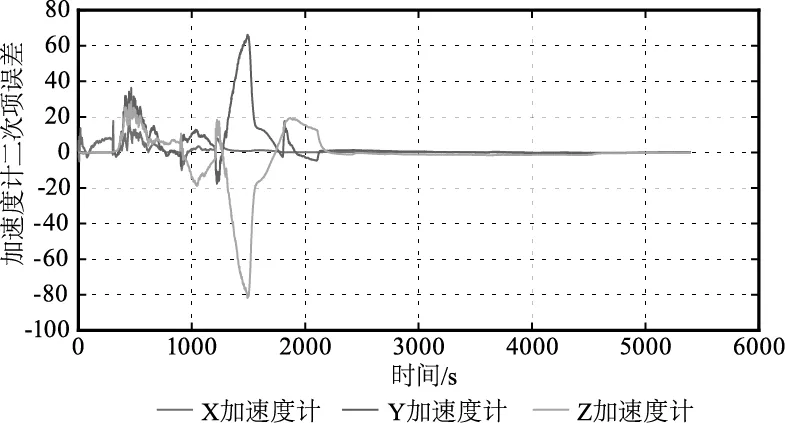
圖6 加速度計(jì)非對(duì)稱(chēng)誤差估計(jì)結(jié)果

圖7 內(nèi)桿臂誤差估計(jì)結(jié)果
6.2 實(shí)驗(yàn)驗(yàn)證
為驗(yàn)證標(biāo)定方法的有效性,將某型雙軸光纖捷聯(lián)慣導(dǎo)系統(tǒng)安裝在六自由度轉(zhuǎn)臺(tái)上,按照文中所述的標(biāo)定方法開(kāi)展標(biāo)定試驗(yàn)。由于六自由度轉(zhuǎn)臺(tái)只能實(shí)現(xiàn)單個(gè)正弦波或余弦波,無(wú)法實(shí)現(xiàn)多個(gè)正弦或余弦波的疊加,故角運(yùn)動(dòng)采用幅值最大的正弦波,線運(yùn)動(dòng)條件與仿真條件保持一致。初始相位為零,在靜基座條件下完成初始對(duì)準(zhǔn)后,六自由度轉(zhuǎn)臺(tái)啟動(dòng)開(kāi)始動(dòng)基座標(biāo)定試驗(yàn)。將在六自由度轉(zhuǎn)臺(tái)下的標(biāo)定結(jié)果與靜基座條件下已有的標(biāo)定結(jié)果做對(duì)比,如表3所示。
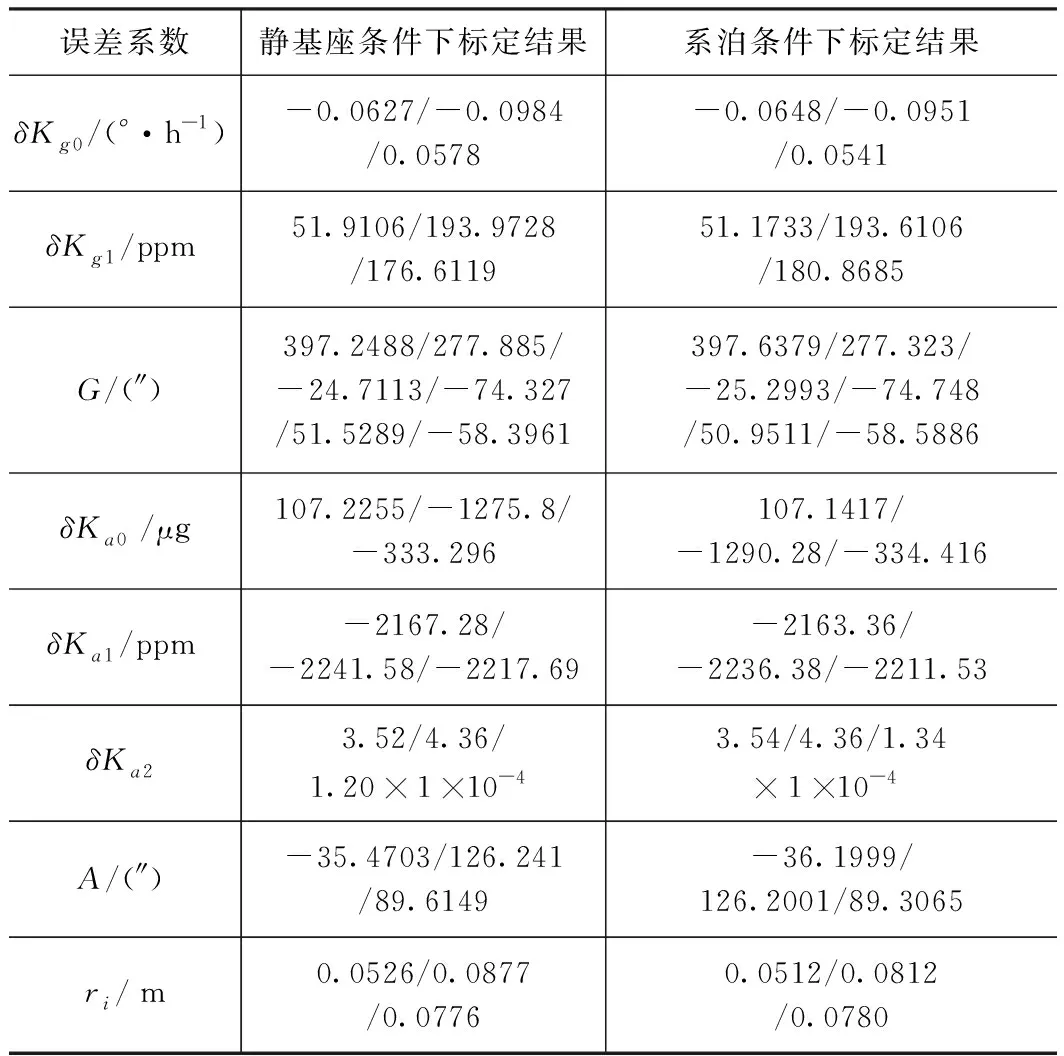
表3 靜基座與系泊狀態(tài)下標(biāo)定結(jié)果對(duì)比
7 結(jié) 論
本文提出了一種在系泊條件下的光纖陀螺捷聯(lián)慣導(dǎo)誤差參數(shù)標(biāo)定方法,該方法在標(biāo)定出陀螺儀和加速度計(jì)的零偏,標(biāo)度因數(shù)誤差和安裝誤差的基礎(chǔ)上,增加了對(duì)加速度計(jì)非對(duì)稱(chēng)誤差和內(nèi)桿臂效應(yīng)誤差項(xiàng)的標(biāo)定。該方法并改進(jìn)了在系泊條件下獲取誤差速度的方法,使得誤差速度的獲取不會(huì)有明顯的滯后,增加了標(biāo)定的準(zhǔn)確度。仿真及實(shí)驗(yàn)結(jié)果表明,設(shè)計(jì)的轉(zhuǎn)位路徑合理有效,能有效激勵(lì)出慣性器件的所有誤差項(xiàng),并能對(duì)誤差模型中的所有誤差系數(shù)進(jìn)行有效估計(jì)。通過(guò)與靜基座標(biāo)定結(jié)果對(duì)比,在系泊狀態(tài)下,各誤差項(xiàng)標(biāo)定結(jié)果與靜基座狀態(tài)一致,證明了標(biāo)定方法的有效性,具有實(shí)際的應(yīng)用價(jià)值。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫(huà)報(bào)(2019年5期)2019-05-26 14:26:14
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12