基于毫米波雷達系統的汽車開門防碰撞安全預警系統
2020-04-23 09:37:59李家毅董少帥茍立松
卷宗 2020年6期
李家毅?董少帥?茍立松
摘 要:隨著科技的進步,人民生活水平的日益提升,駕駛員和機動車的日益劇增也給道路交通帶了許多問題。本作品探討的是由于駕駛員或乘客未注意后方來車而突開車門造成的交通事故。作品主要是應用毫米波雷達監測系統通過計算分析,運用蜂鳴警報、強制自鎖車門等方式來保證駕駛員、乘客及周圍行車之間的安全。
關鍵詞:毫米波雷達;監測;突開車門;安全距離;自鎖
1 研究背景
隨著生活水平的不斷提高,中國機動車保有量不斷上升,其中汽車在人們的生活中越來越普及。其中交通事故的發生率隨著機動車數量的增多也明顯提高,如何降低交通事故的發生率成為人們有待解決的問題。
最近幾年由于車輛的車門開啟不當導致的交通事故不在少數,俗稱“開門死”。這類事故實際上是由于車輛停車時由于開門不當導致停車車輛側后方的非機動車、行人撞上車門,造成人員傷亡及車輛的損壞。在突開車門造成的碰撞的事故中,如果車內的駕駛員和乘客能獲得預警并知道車側后方有非機動車或者行人,這類事故在很大程度上得到緩解。
現在國內市場上這樣的安全預警系統不多,應用于實際的少之又少。本小組對以毫米波雷達為基礎的汽車開門防碰撞安全預警系統進行討論研究。
2 系統啟動前提條件
1)正常行車途中(有一定速度)時中控鎖成鎖死狀態,當停車開門時駕駛員手動打開中控鎖時啟動系統。
2)當出現車輛檔位移至倒車檔位時,系統啟動。
3)安全帶拆卸時,系統啟動。
4)速度較慢逼近停止時,右轉向燈處于常閃狀態時,系統啟動。[1]
3 系統工作原理
車載毫米波雷達
3.1 測速原理
根據多普勒效應,毫米波雷達的頻率變化、本車后方監測目標的速度是緊密相關的,根據反射回來的毫米波頻率和發射頻率之間的一個差值即多普勒頻率,多普勒頻率的值與后方監測目標的速度成正比,由此可以得知后方監測目標的運動速度。
3.2 測距原理
毫米波雷達通過發射天線發出相應波段的有指向性的毫米波,當毫米波遇到后方監測目標后反射回來,通過接收天線接收反射回來的毫米波。根據毫米波的波段,通過公式計算就可以知道毫米波雷達(本車)和目標之間的相對距離(x)了,同時也就知道目標的位置。
x代表本車與目標之間相對距離,t代表毫米波的飛行時間,C是光速
4 測量方位角原理
通過毫米波雷達的發射天線發射出毫米波后,遇到被監測物體,反射回來,通過毫米波雷達并列的接收天線,通過收到同一監測目標反射回來的毫米波的相位差,就可以計算出被監測目標的方位角了。
此系統主要通過檢測分析車身兩側后方來車及車內的實際情況及各個信號的綜合運用來判斷后方車輛是否處于構成危險的區域及是否會造成事故并進行提醒和強制鎖定車門的裝置。以此來達到避免安全事故的發生的目的。系統首先通過一個信號采集系統采集線性電信號,采集的信號分別來自四個方面:1)當停車后,車內的中控鎖從鎖死狀態到打開狀態。2)當汽車擋位移至倒車擋位時。3)安全帶拆卸時。4)汽車速度較慢逼近停止時,右轉向燈處于常亮狀態。
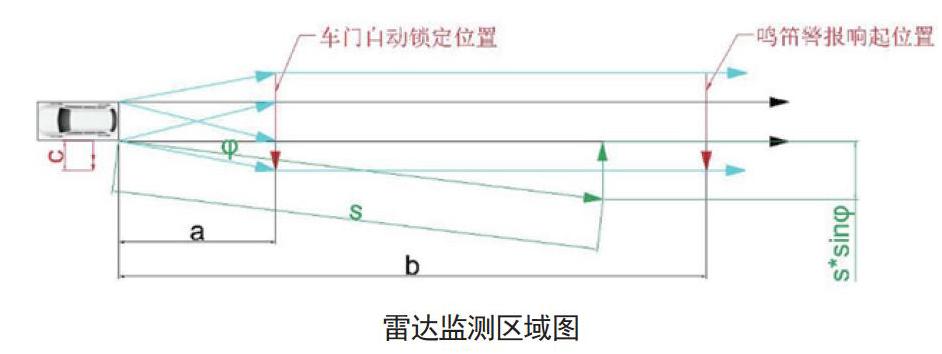
當采集系統判斷存在這幾個信號中的其中一個時,再通過電信號傳給控制系統發出指令開啟雷達檢測系統,進而雷達檢測系統開始檢測后方運動車輛與雷達安裝位置的距離S,及車輛與雷達安裝位置的夾角同車身正方向直線的夾角Φ,再將測量的數據通過信號傳送回控制系統進行判斷,S*sinΦ是否 一、(若不滿足條件,則不進行預警,再判斷條件5和條件6是否滿足,①若滿足其中之一就關閉整個系統,②若條件5和6都不滿足,再由雷達系統檢測,又進行判斷循環。) 二、(若滿足條件,再進行判斷S*sinΦ是否 其中條件5即判斷車輛重新具有速度是通過車內的霍爾傳感器方波信號的不同采集數據將汽車速度數據傳到控制系統進行判斷。條件6:同樣與前面介紹的電信號采集過程一樣,當遙控鎖接收到遙控鑰匙的信號時,同時將此信號穿輸到采集系統再進行進一步判斷。信號采集系統和控制系統都通過MATLAB把模型轉化為動態鏈接,再與單片機相連接。由此組成一個完整的毫米波雷達系統 如圖,為本系統的雷達監測區域示意圖,該系統監測區域主要分為兩個區域,第一個區域為蜂鳴警報響起區域該段距車身30m,后方車輛在這段距離有足夠的時間改變自身的行車軌跡;第二個區域為車門自鎖位置,經過分析,該區域長度為a(8m)。因此的當車輛臨近此區域時,通過自鎖車門的方式在盡量不影響上下車的情況下來保障乘客、駕駛員和行車的安全。 5 系統關閉條件: 1)車輛重新具有一定速度且中控鎖鎖上,檔位為前進檔時,系統關閉(運動)。 2)遙控鎖接收到遙控鑰匙所發射的信號時,系統關閉(靜止)。 6 結語 智能交通領域是未來交通人將深入研究探討的一個前沿領域,該領域力求實現人、車、路的智能化協調發展。在智能化的時代,安全要素是我們必須首要考慮的。該系統綜合運用毫米波雷達和各類傳感器,使得駕駛員、乘客及行車之間的安全能夠得以保證。該系統智能、靈活,相信在智能交通領域中將會具有其極具特色的優勢。 參考文獻 [1]王明亮.基于后視攝像頭的車門開啟安全預警系統研究[D].重慶理工大學,2015. [2]岳文豹.FMCW雷達測距系統的研究與實現[D].中北大學,2013. [3]吳進軍,方繼根等.基于CAN總線的新能源汽車ECU控制器程序刷寫系統設計[J].機電產品開發與創新,2018. 作者簡介 李家毅(1999-),大學本科,研究方向:交通運輸。 董少帥(1998-),大學本科,研究方向:交通運輸。 茍立松(1999-),大學本科,研究方向:交通運輸。