新型無耦合兩轉動并聯機構運動學及性能分析*
2020-04-24 01:26:14王科明張彥斌荊獻領陳子豪蘆風林
機電工程 2020年4期
王科明,張彥斌,荊獻領,陳子豪,蘆風林
(河南科技大學 機電工程學院,河南 洛陽 471003)
0 引 言
按照其動平臺輸出運動特性的不同,并聯機構可分為純移動[1]、純轉動[2]和混合型[3]三種機構。純轉動并聯機構的動平臺具有2個或3個轉動自由度。其中,兩自由度轉動并聯機構在衛星天線、踝關節康復機器人等領域中具有獨特的優勢,已成為該領域研究的熱點問題[4-5]。按輸入與輸出之間的關系,并聯機構又可分為耦合和解耦兩種機構[6]。其中,解耦并聯機構因在運動和控制等方面呈現出來的優越性,受到了國內外學者的廣泛關注[7-8]。
宋軼民等[9]提出了一種具有大轉角的兩轉動并聯機構,對其進行了構型分析和運動學優化設計;XU等[10]通過分析機構分支約束力螺旋的幾何關系,設計了一類具有連續轉軸的兩轉動并聯機構;DUAN等設計了兩自由度球面并聯機構,并對其進行運動規劃和動力學分析,得出了機構的輸入和輸出之間的角位移、角速度和角加速度的定量關系;CARRICATO等[11]通過減少機構中閉環的數目,設計出了一種含有單環回路的并聯手腕機構,增大了機構的工作空間;侯雨雷等[12]針對并聯機構內部耦合性所帶來的一些問題,提出了一種新型的兩自由度轉動解耦并聯機構,并討論了驅動輸入的選擇對機構奇異性的影響。
本文將提出一種新型無耦合RR-RUPU兩轉動并聯機構,詳細分析機構的運動學、奇異性,利用運動條件指標對機構進行完全各向同性設計,并進行運動學仿真分析。
1 機構的結構設計與輸出特性分析
新型RR-RUPU并聯機構的結構簡圖如圖1所示。
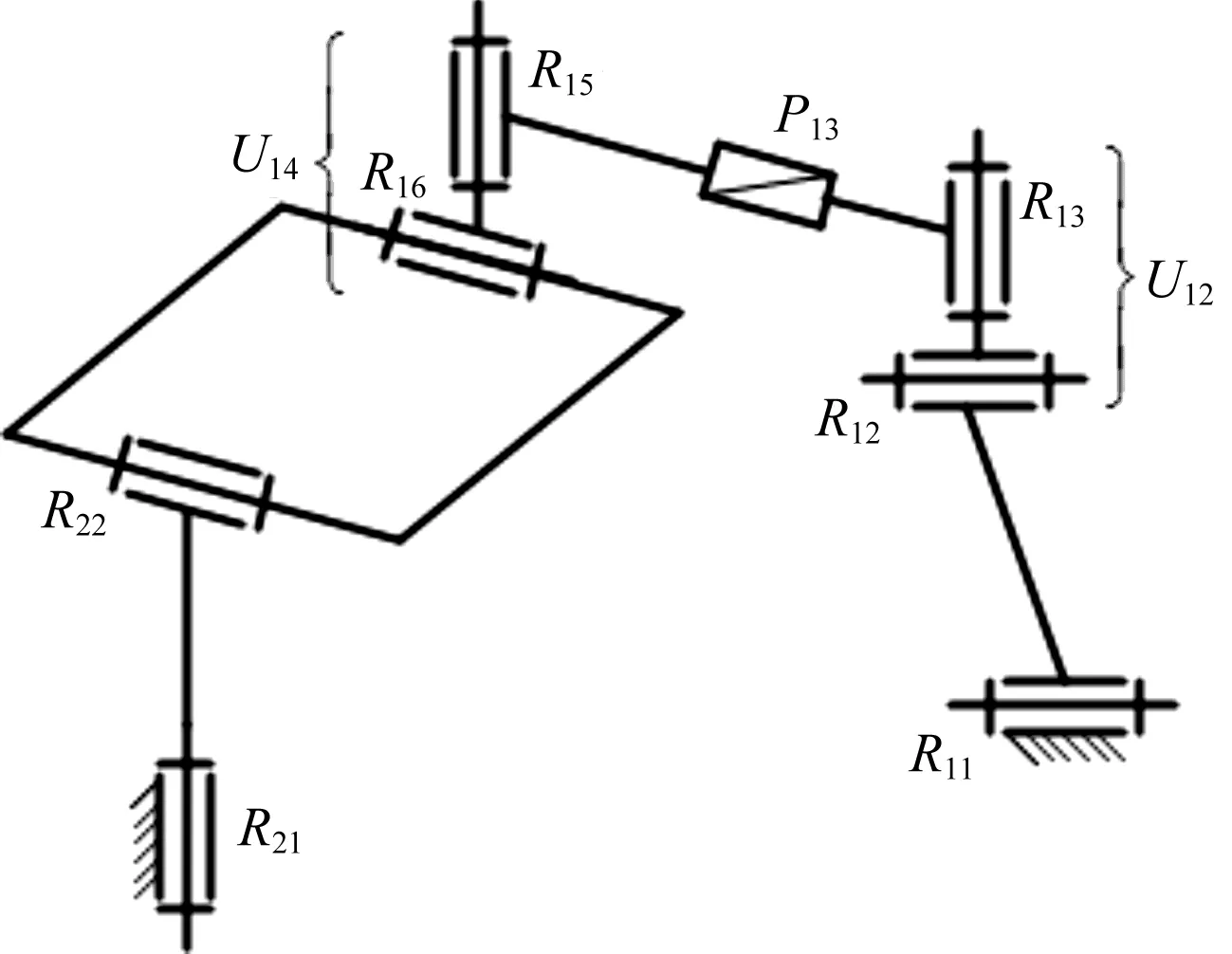
圖1 新型RR-RUPU并聯機構簡圖
圖1中:該機構由動平臺、定平臺以及連接兩平臺的兩條單開鏈組成[13]。第一條分支從定平臺到動平臺的布置依次為轉動副R11、萬向鉸U12、移動副P13、萬向鉸U14。
為便于結構描述和問題分析,將U12副與U14副分別用兩個軸線垂直相交的轉動副R12與R13、轉動副R15與R16代替。第一條分支運動鏈中R11與R12副的軸線相互平行,R13與R15副的軸線相互平行且垂直于P13副的移動方向,因此,該分支運動鏈的拓撲結構可記為SOC{-R11//R12⊥R13(⊥R13)//R15⊥R16-}。第二條分支從定平臺到動平臺運動副的布置依次為轉動副R21和R22,兩運動副軸線垂直相交,該分支的拓撲結構記為SOC{-R21⊥R22-}。
兩條分支裝配條件為:與定平臺相連的轉動副R11和R21的軸線相互垂直;與動平臺相連接的轉動副R16和R22的軸線相互平行。選取安裝于定平臺上的R11和R21副作為機構的主動副。
根據機構運動副的配置關系,可寫出第一條分支和第二條分支的方位特征集Mb1和Mb2,分別為:
(1)
(2)
其中,符號右上標數字表示支鏈的特征自由度數,如r2//(R15,R16)表示第一條分支末端構件在平行于R15和R16副軸線所確定的平面上,存在2個轉動自由度,t0表示移動自由度的數目為0。
因此,圖1所示機構動平臺的方位特征集Mb為:
(3)
由式(3)可知:動平臺具有繞R21副和R22副軸線轉動的自由度,即輸出特性為二維轉動,而不存在移動自由度。
并聯機構自由度M可利用Yang-Sun公式進行計算,即:
(4)
式中:g—機構運動副總數;fk—第k個運動副的自由度數;v—獨立回路數。
對于圖1所示機構,g=6,∑fk=8,v=1,∑ξLm=6,因此M=2。可見計算結果與前述分析一致,所以該機構只能實現空間二自由度轉動。
2 運動學分析
2.1 姿態分析
在RR-RUPU并聯機構的三維CAD模型中,定坐標系O-xyz,其原點O位于第二條分支兩轉動副軸線的交點,z軸與R21副軸線重合,x軸平行于R11副軸線;動坐標系P-uvw,其原點P位于動平臺上且與定坐標系的原點O重合,v軸與R22副軸線重合,w軸垂直于動平臺平面。
在初始位形下,兩坐標系的軸線分別對應重合。設q11和q21分別為兩主動副的輸入角位移;α為動平臺繞v軸轉動的姿態角,設其繞v軸的反方向轉動為正;β為動平臺繞z軸轉動的姿態角,繞z軸方向轉動為正;l為第一條分支主動桿的長度,即R11和R12副軸線間的距離;r表示動平臺結構尺寸,即R16和R22副軸線間距離。
建立局部坐標系O1-x1y1z1,其原點O1位于轉動副R11的軸線上,且x1軸與該軸線重合,z1軸垂直定平臺平面。
新型RR-RUPU并聯機構CAD模型如圖2所示。
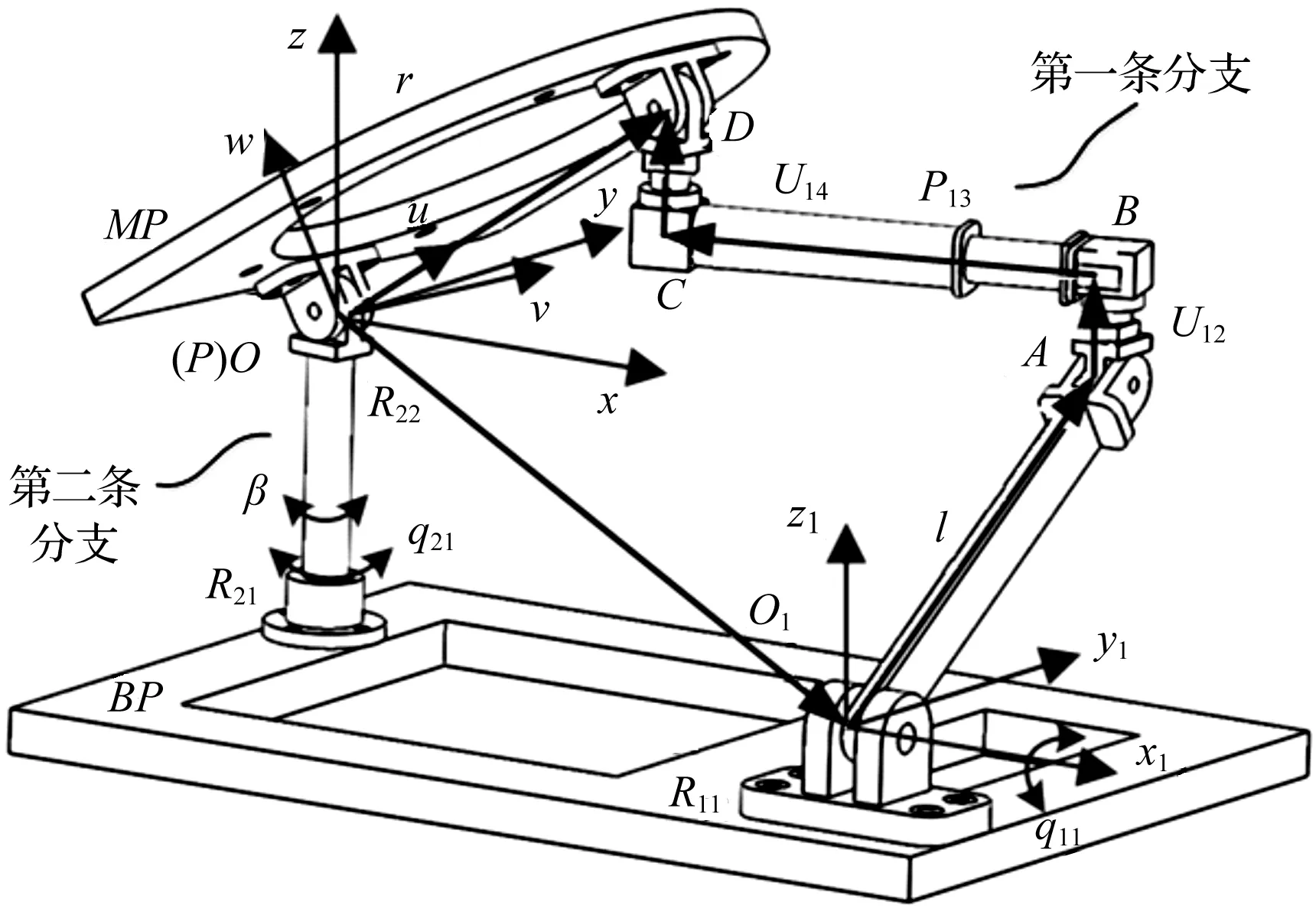
圖2 新型RR-RUPU并聯機構CAD模型
故第一條分支運動鏈在局部坐標系O1-x1y1z1下的運動螺旋系為:

(5)
式中:Lij,Mij,Pij,Qij,Rij—非零常數(i=1,j=1,4,5,6)。
根據式(5)可知:第一條分支運動鏈的運動螺旋系為6系,因此不存在反螺旋。
而在定坐標系O-xyz下,第二條分支運動鏈的運動螺旋系為:
(6)
同理可得,該螺旋系為2系,反螺旋為4系,即:
(7)
(8)
(9)
純轉動RR-RUPU并聯機構的姿態正解,是指已知主動關節的輸入角位移(q11,q21),求其動平臺的姿態角(α,β)。圖2中,A點為U12副中兩轉軸軸線的交點,B點為P13副移動方向與U12副豎直轉軸軸線的交點,C點為P13副的移動方向與U14副豎直轉軸的交點,D點為U14副中兩轉軸的交點。
(10)
(11)
將式(11)進一步整理,可得:
rsinα=O1z+lsinq11+a+b
(12)

由于O1z、a、b僅與機構的結構尺寸有關,只需適當設計其結構尺寸,便可滿足O1z+a+b=0成立,那么式(12)可化簡為:
rsinα=lsinq11
(13)
從而可求得動平臺姿態角α為:
(14)
由圖2可知,動平臺繞z軸的姿態角β僅與第二條分支主動副R21的角位移q21相關,故兩者的關系可寫為:
q21=β+c0
(15)
式中:c0—動平臺繞z軸的初始角度。
由于前面定義了動坐標系在初始位置時與定坐標系重合,即c0=0,則式(15)可改寫為:
β=q21
(16)
2.2 角速度分析
將式(13,16)對時間進行一階求導,可得到該機構的角速度方程,即:
(17)

且有:
(18)
根據式(18)可知:速度雅可比矩陣為對角陣,主動關節的輸入速度與動平臺的輸出速度之間存在一對一的控制映射關系,所以該機構具有無耦合的運動學特性,尤其是雅可比矩陣對角線上的第二個元素等于1。
3 奇異性分析
奇異性是并聯機構的固有屬性,在機構的設計過程中,奇異性分析是必不可少的環節。FANG和TSAI[14]將并聯機構的奇異類型分為:分支運動奇異、驅動奇異和約束奇異3種類型。
3.1 分支運動奇異
這種運動奇異的發生與并聯機構分支運動鏈的運動螺旋系的階數有關,故稱為分支運動奇異。當運動螺旋系的階數發生改變時,動平臺的約束螺旋系的階數也隨之改變,導致機構動平臺會瞬間得到或失去一個或幾個自由度。
由式(6)可知:第二條分支的運動螺旋系始終為2系,故該分支不會發生分支運動奇異形式。而式(5)表明,第一條分支的運動螺旋系為6系螺旋,該螺旋系的相關性可等價于由該螺旋系構成的階方陣A是否滿秩,即:
(19)
若矩陣A不滿秩,則該運動螺旋系線性相關,此時其行列式的值det(A)為0。
由于矩陣初等變換不影響矩陣的秩,即不影響其行列式是否為0。根據矩陣分塊計算方法,當僅考慮A對應行列式的值是否為0時,則有:
det(A)=det(E)det(F)
(20)
其中:
若矩陣E或F其中一個不滿秩,那么矩陣A便不滿秩。下面對兩種類型分別進行分析:
(1)類型1:矩陣E不滿秩。
經計算det(E)=lcosq11cosβ,那么det(E)=0成立的條件為β=±π/2或q11=±π/2。
當q11=±π/2時,將其代入式(5)可得該位形下的運動螺旋系,同時可求得該位形處分支的約束螺旋為:
(21)
(2)類型2:矩陣F不滿秩。
根據式(20)可得矩陣F行列式的值為:
det(F)=M14lcosq11
(22)
由于結構的限制,在圖2所示的裝配位形下,當β=-π/2和q11=-π/2時,機構不會發生分支奇異。
分支奇異位形如圖3所示。
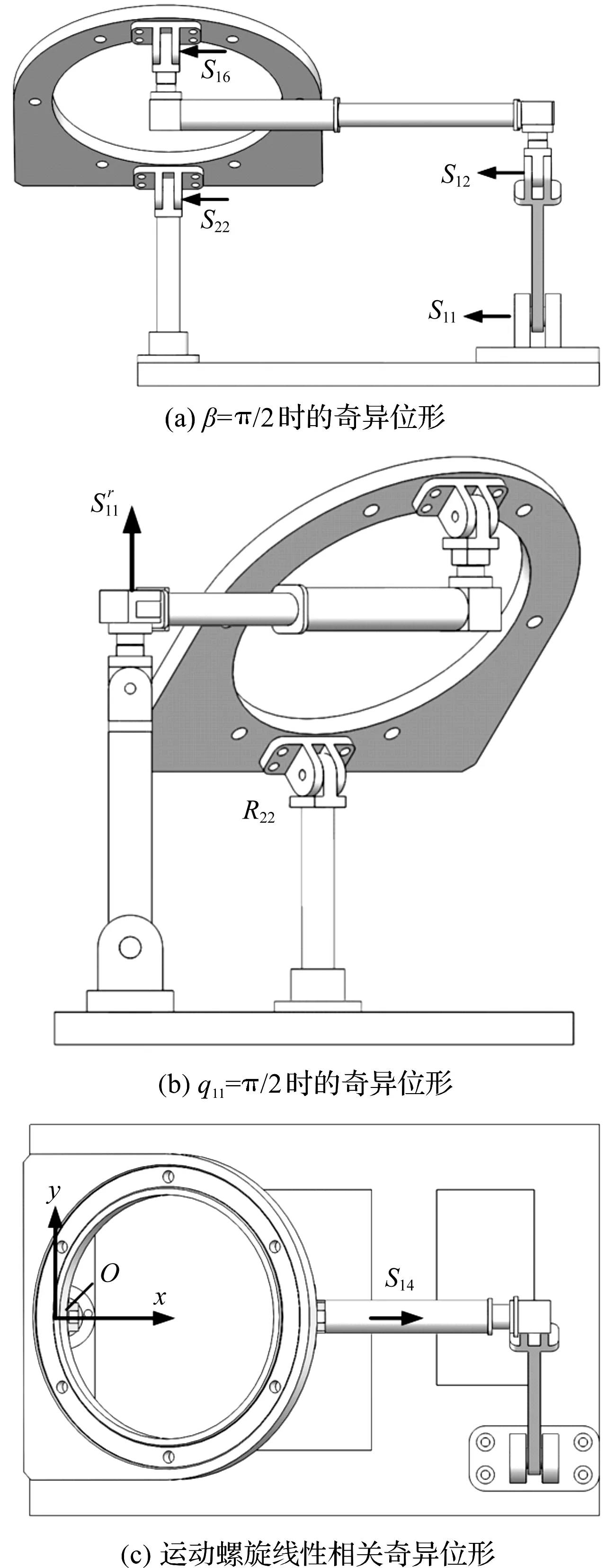
圖3 分支奇異位形
3.2 驅動奇異
(23)
(24)
式中:Q=-(cosβ+lcosq11sinβ)/R16。
將式(23,24)整理成矩陣的形式,即:
(25)
將矩陣分塊后可知,當且僅當矩陣G主對角線上的第二個子塊不滿秩時,矩陣G不滿秩。即當時矩陣欠秩,從而約束力螺旋系線性相關,那么便有4組奇異位形組合,分別為:β=π/2,q11=π/2;β=-π/2,q11=π/2;β=π/2,q11=-π/2;β=-π/2,q11=-π/2。
由于機構的結構限制,在圖2所示的裝配位形下,組合c、d不會發生。
當R11副被鎖定后,該分支對動平臺的驅動力螺旋與第二條分支產生的約束力螺旋線性相關,從而產生驅動奇異位形,如圖4所示。
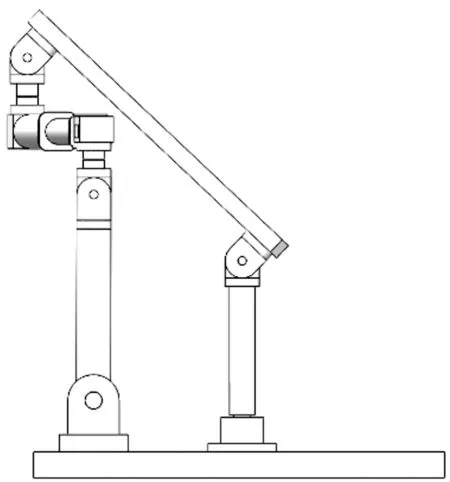
圖4 驅動奇異位形
3.3 約束奇異
分支施加到動平臺的約束力螺旋線性相關時,動平臺得不到應有的約束力,產生非預期自由度,即發生約束奇異。
由式(7)可知:在圖2所示機構的裝配位形下,分支施加到動平臺上的約束力螺旋系始終包含3個線性獨立的約束線力螺旋和一個約束力偶螺旋,因此,該機構不存在約束奇異。
4 機構的完全各向同性設計
在整個工作空間內,若機構的雅可比矩陣條件數恒等于1,則稱該機構具有完全各向同性的運動學性能。由于這類機構的雅可比矩陣為單位陣,其輸入-輸出速度之間的運動傳遞既不放大也不縮小,更不存在失真情況,可見完全各向同性并聯機構具有良好的運動和力傳遞性能。
通常采用機構的運動條件指標(KCI)來表征機構的靈巧性。當KCI=1時,機構具有各向同性的特性。KCI在數值上等于雅可比矩陣J的條件數k(J)的倒數,即:
(26)
式中:σmax—J的最大奇異值;σmin—J的最小奇異值。
對于無耦合并聯機構,其速度雅可比矩陣為對角矩陣即正規矩陣,因此,對于式(18)所示的雅可比矩陣J,存在一個階的酉矩陣U,使得:
(27)
(28)
式中:λ1,λ2—矩陣J的特征值;UH—U的共軛轉置矩陣;JH—J的共軛轉置矩陣。

由于KCI的V值在區間[0,1]內變化,將雅可比矩陣J的奇異值代入式(26)可得:
(29)
因此,KCI值的大小不僅與機構的結構尺寸有關,還與機構輸入角位移q11以及輸出角位移α有關。
對于給定的機構,其結構尺寸也隨之確定。將式(14)進行三角變換,并代入ζ的表達式可得:
(30)
式中:κ=l/r。
機構運動條件指標KCI隨其結構參數κ和輸入角位移q11變化的規律如圖5所示。
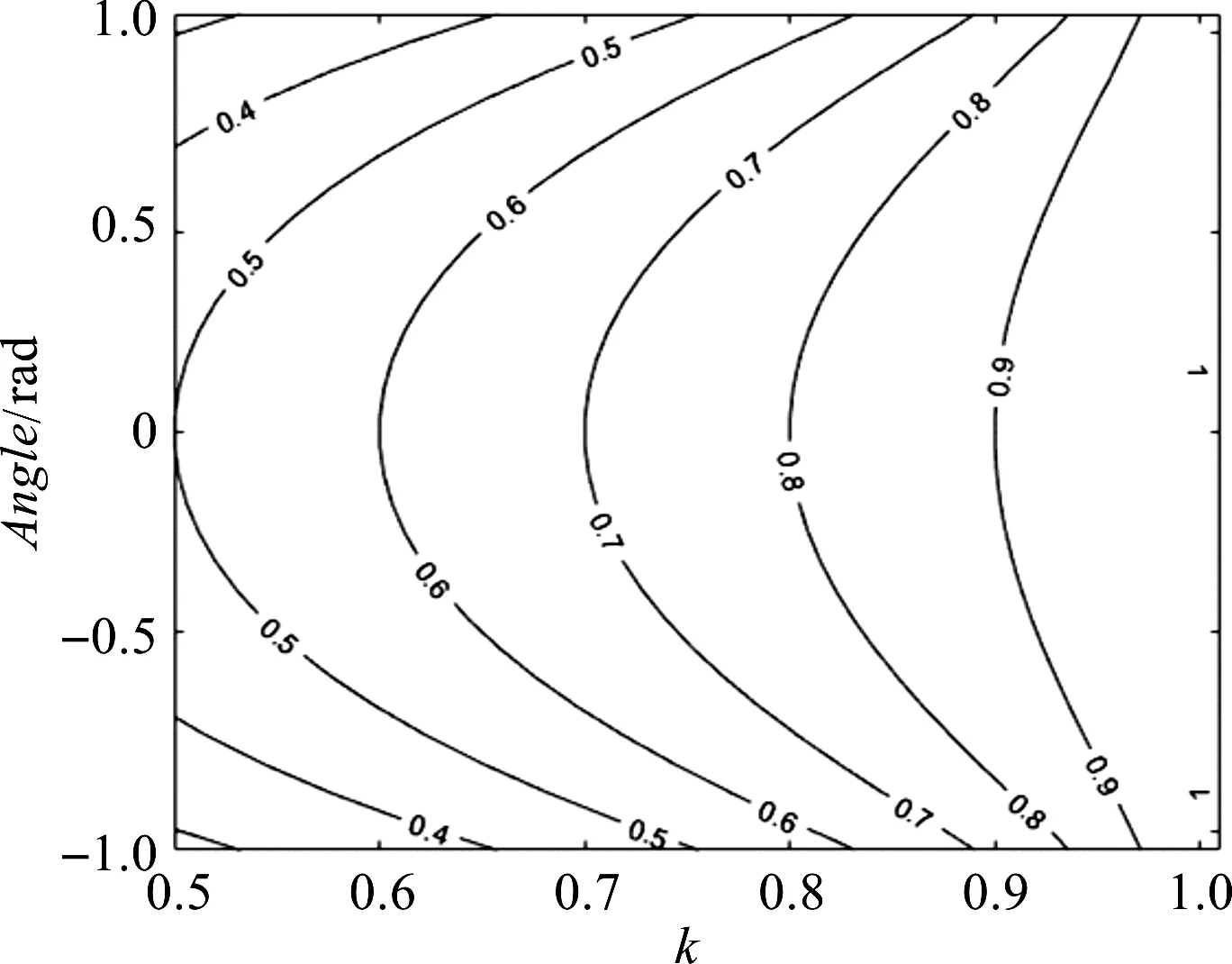
圖5 運動條件指標的等值線圖
由圖5可知:KCI等值線關于直線q11=0°對稱分布,且隨著結構參數κ值的增大趨于平緩;值得注意的是,當κ=1時,無論q11如何變化,KCI的值為常數且恒等于1。
將κ=1代入式(28)可得KCI=1,驗證了圖5中KCI等值線的變化規律。由此可見,只要滿足結構尺寸條件l=r,則機構在整個工作空間內具有完全各向同性的運動學性能。
5 機構運動學仿真分析
運動學仿真的主要目的是直觀再現機構輸入與輸出之間的映射關系。ADAMS/View中提供了豐富的幾何體建模工具,但其對復雜形狀零件的建模功能相對薄弱,難以用其來創建具有復雜特征的零件;而相對于ADAMS/View的運動學分析,SolidWorks/motion運動分析模塊的通用性和準確度較差,因此,本文采用SolidWorks和ADAMS軟件的運動學聯合仿真的方式,對RR-RURU并聯機器人機構進行運動學虛擬樣機的建模和仿真。
設定機構的結構尺寸為l=r,基于SolidWorks軟件,對機構進行建模。筆者將模型數據文件導入ADAMS軟件,并對導入的三維實體模型重新定義各構件的約束關系,完成虛擬樣機的創建;設置兩主動關節的角位移函數分別為:q11=30°sin(πt/6),q21=-25°sin(πt/4-π/3),將其編譯到ADAMS的驅動函數中,設置仿真時間為12 s,仿真步數為200。
在ADAMS/Postprocessor模塊中得到的動平臺的運動學仿真曲線如圖6所示。
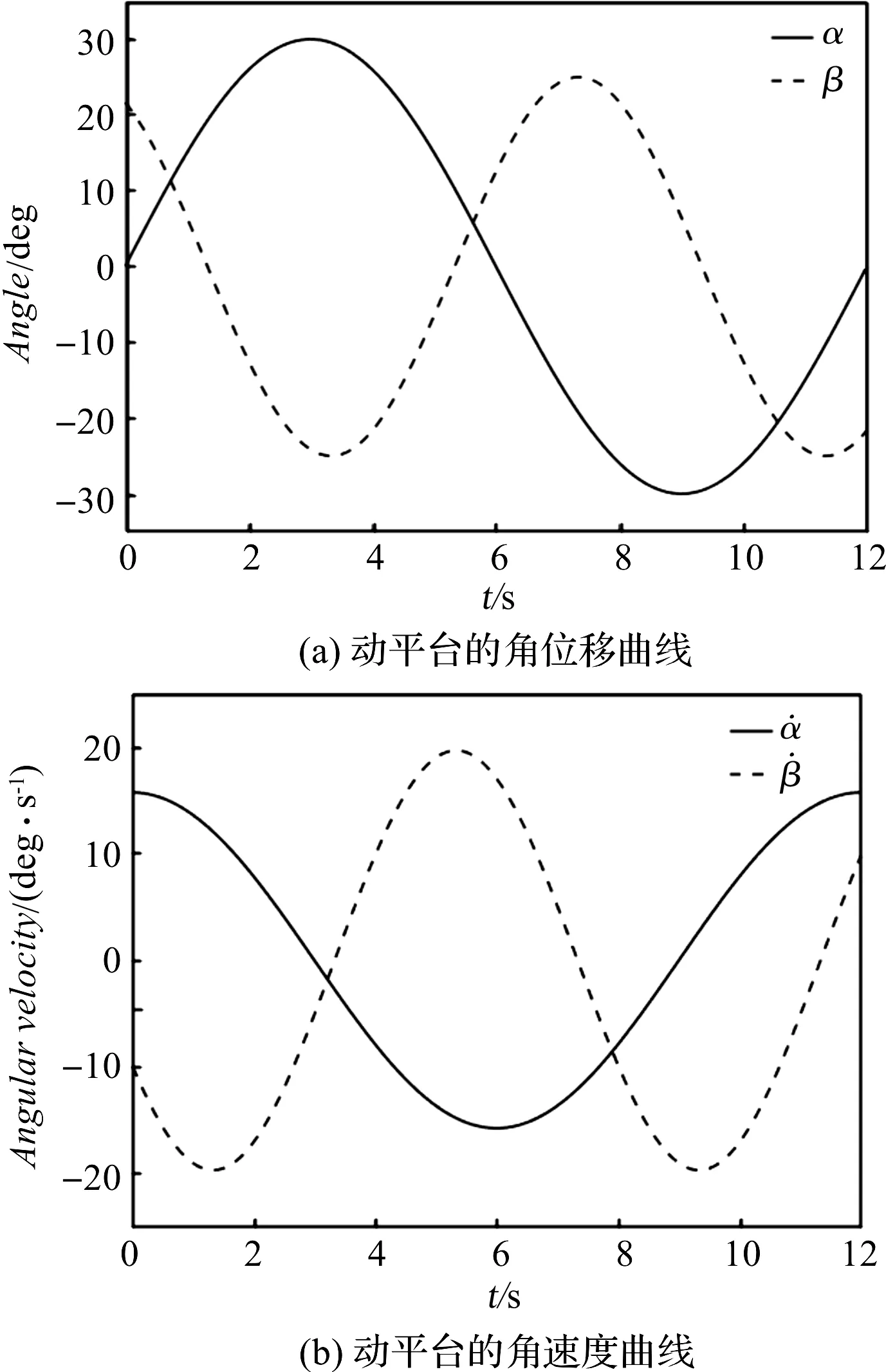
圖6 動平臺的運動學仿真曲線
根據圖6的運動學仿真結果可知:在整個運動過程中,動平臺的角位移和角速度可在一定范圍內變化,運動過程平穩,不存在劇烈沖擊的現象。
6 結束語
針對并聯機構的強運動學耦合性問題,本文設計出了一種新型RR-RUPU兩轉動并聯機構,推導出了其姿態和角速度方程;由于其速度雅可比矩陣為對角陣,其具有無耦合運動學特性,即其主動關節的輸入速度與其動平臺的輸出速度之間具有一對一的控制映射關系,所以該機構具有良好的運動傳遞性能。尤其是當結構尺寸滿足一定的要求情況下,其雅可比矩陣為單位陣,機構具有完全各向同性的運動學性能。
筆者所作的研究為該機構的動力學及其實體樣機的研制提供了一定的理論基礎。
參考文獻(References):
[1] ZHANG Y B, ZHAO Y F, JING X L, et al. Type synthesis of uncoupled translational parallel manipulators based on actuation wrench screw theory[J]. Advances in Mechanical Engineering, 2018,10(1):1-10.
[2] HOU Y L, DUAN Y B, YAO J T, et al. Configuration optimization and static analysis of adjusting parallel mechanism for the sub-reflector of antenna[J]. Advanced Materials Research,2011(338):425-430.
[3] 馬廣英,陳 原,姚云龍,等.一種水陸兩棲機器人的兩移兩轉串并混聯腿機構[J].哈爾濱工程大學學報,2018,39(1):135-142.
[4] LALIBERTé T, GOSSELIN C. Synthesis, optimization and experimental validation of reactionless two-DOF parallel mechanisms using counter-mechanisms[J]. Meccanica,2016,51(12):3211-3225.
[5] DUAN X, YANG Y, CHENG B. Modeling and analysis of a 2-DOF spherical parallel manipulator[J]. Sensors,2016,16(9):1485.
[6] 劉 曉,趙鐵石,邊 輝,等.耦合型3自由度并聯穩定平臺機構動力學分析[J].機械工程學報,2013,49(1):45-52.
[7] ZENG D X, HUANG Z. Type synthesis of the rotational decoupled parallel mechanism based on screw theory[J]. Science China Technological Sciences, 2011,54(4):998-1004.
[8] 張彥斌,荊獻領,韓建海,等.無耦合二自由度轉動并聯機構型綜合方法研究[J].機械工程學報,2018,54(15):21-30.
[9] 宋軼民,周 培,齊 楊,等.一類大轉角兩轉動并聯機構的構型分析與運動學優化設計[J].天津大學學報,2019,52(9):908-916.
[10] XU Y D, ZHANG D S, WANG M, et al. Type synthesis of two-degrees-of-freedom rotational parallel mechanism with two continuous rotational axes[J]. Chinese Journal of Mechanical Engineering, 2016,29(4):1-9.
[11] DI G R. Single-loop wrists which generate triangular structures[J]. Mechanism & Machine Theory, 2014,80(80):230-245.
[12] 侯雨雷,張占葉,胡鑫喆,等.新型兩轉動自由度完全解耦并聯機構及其特性[J].哈爾濱工業大學學報,2014,(9):80-85.
[13] 安明云,于大泳,張黎明,六自由度并聯機構的誤差分布研究[J].輕工機械,2019,37(1):29-33.
[14] FANG Y F, TSAI L W. Structure synthesis of a class of 4-DoF and 5-DoF parallel manipulators with identical limb structures[J]. International Journal of Robotics Research, 2002,21(9):799-810.