一種多功能彈靜態參數測試系統設計
2020-04-27 08:45:19宋斌李波杜科
科技視界 2020年5期
宋斌 李波 杜科
摘 要
隨著武器裝備的現代化發展,對于彈的速度要求越來越高,須對彈的靜態參數(質量、質心、轉動慣量)進行精確測量。本文設計了一種多功能彈靜態參數測試系統,集質量、質心、轉動慣量測試于一體,主要由機械執行機構和測試系統組成,可自動完成彈的質量、質心及轉動慣量的測量,提高了測試效率。同時介紹了系統的測試原理以及硬件組成,分析了系統的測量誤差及測試效率,表明該系統能夠滿足彈的靜態參數測量及測試效率。
關鍵詞
質量;質心;轉動慣量;效率
中圖分類號: TP23 ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼: A
DOI:10.19694/j.cnki.issn2095-2457.2020.05.046
0 引言
現代高速飛行的彈,其質量、質心及轉動慣量的精度對彈的飛行軌跡精度影響較大,應進行精確測量。目前國內普遍采用分離式測量方法,按照質量、質心、轉動慣量先后順序采用不同設備進行測量,自動化程度低,測試人員勞動強度大等缺點,且不能適應生產線的快速批量測試。本文介紹了一種多功能彈靜態參數測試系統,可實現一臺設備同時完成質量、質心、轉動慣量的測試,可廣泛應用在自動生產線的測試工位,提高生產效率。
1 測量原理
1.1 質量測量原理
采用防爆電子臺秤實現對被測物質量的精確測量,該電子臺秤最大稱量為300kg,測量精度20g,滿足設備指標要求。
1.2 質心測量原理
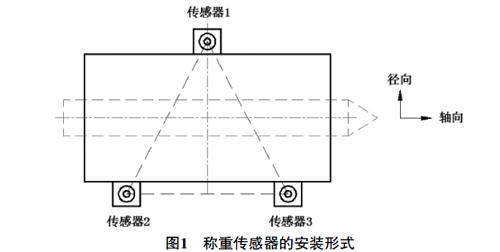
在設備秤盤的腹心部位,安裝三支高精確度的稱重壓力傳感器,三支傳感器形成等腰三角形,安裝布置如圖1所示。
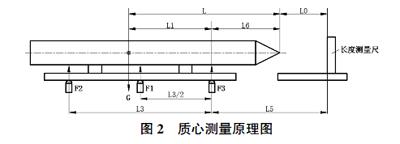
質心測量的力學模型如圖2所示。根據靜力矩平衡原理,質心的測量公式為:
式中:L為被測彈體的質心;
L3—稱重傳感器2、3在軸向方向的距離;
L5—稱重傳感器3在軸向方向與長度測量尺零位的距離;
L6—待測物頂端在軸向方向與稱重傳感器3的距離;
L0—待測物頂端在軸向方向與長度測量尺零位的距離。
1.3 偏心測量原理
偏心測量采用成熟,分別測量出原位及旋轉90°、180°、270°四次F1的值,根據靜力矩平衡原理,偏心的測量公式為:
式中:e為被測彈體的偏心,F11、F12、F13、F14分別為F1的四次測量值。
1.4 轉動慣量測試原理
轉動慣量采用成熟的扭擺法進行測試,轉動慣量測量值Id,可由下式計算得出。
其中:
Id——待測物體的轉動慣量
I0——裝置空載的轉動慣量
Ib——標準樣柱的轉動慣量
Tb——加標準樣柱的振動周期
T0——裝置空載的振動周期
T——加待測物的振動周期
2 測試系統總體設計
2.1 測量與控制系統設計
測量與控制系統由主控計算機、電子天平、高精度數字多用表、PLC主機、運動控制模塊、頻率測量模塊、數字I/O模塊、矩陣開關、伺服/執行控制器和安全保護裝置組成,實現自動化測量。主控計算機完成數據處理/分析,電子天平完成高精度的質量測量,高精度數字多用表完成力傳感器的數據采集實現質心偏心測量。運動控制模塊接收主機傳送的指令和數據,通過計算生成位置指令,并將位置指令傳給伺服/執行控制器,實現機構的運動,完成自動化測量。
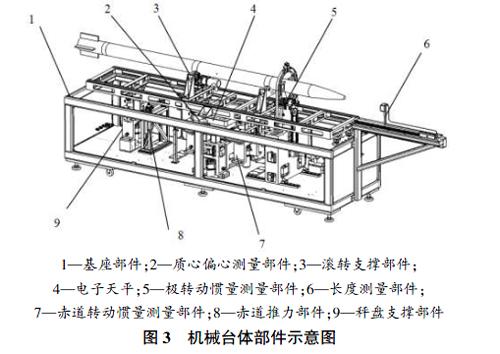
1—基座部件;2—質心偏心測量部件;3—滾轉支撐部件;
4—電子天平;5—極轉動慣量測量部件;6—長度測量部件;
7—赤道轉動慣量測量部件;8—赤道推力部件;9—秤盤支撐部件
2.2 機械臺體部件設計
機械臺體部件主要由質心偏心測量部件、電子天平、滾轉支撐部件、長度測量部件、秤盤支撐部件、極轉動慣量測量部件、赤道轉動慣量測量部件、赤道推力部件及基座部件等組成。機械臺體部件示意圖如圖3所示。
2.3 軟件設計
軟件設計主要功能是實現彈體多個靜態參數(質量、質心、轉動慣量)的自動測試,根據測試數據進行處理,并判斷測試的結果是否合格,可以查看歷史測試數據和結果。該測試軟件包括底層驅動軟件和上層測控軟件兩部分,其中底層驅動軟件主要實現測量時的相關運動控制、邏輯控制和測試數據讀取等功能。上層測控軟件主要實現參數設置、測試流程和測試結果處理等工作。
2.3.1 底層驅動軟件
底層驅動軟件主要以西門子PLC的TIA Portal V13為開發平臺,其主要功能為:
a)讀取光柵尺的值,計算出被測彈體的長度;
b)控制臺體升降運動、旋轉等運動,同時記錄測量數據(彈體重量、擺動周期)等;
c)限位、安全保護等邏輯控制。
2.3.2 上層測控軟件
上層測控軟件主要包括參數校準、彈體測試和傳感器標定等工作:
a)通過對樣柱進行測試,實現參數的校準;
b)實現測試的控制流程,保證測試過程中的各個環節的狀態穩定可靠;
c)自動實現彈體多個靜態參數(質量、質心、轉動慣量)的測試,可選擇單個、多個參數進行測試。
d)對測試數據進行處理,得出測試結果。并可實現測試數據的保存和查看等功能。
e)可對傳感器進行標定。
3 誤差分析
3.1 質量誤差
設備采用高精度電子天平進行質量的測量,其精度可達到量程300kg,精度20g,完全滿足技術指標要求。
3.2 質心誤差
質心誤差主要由光柵尺和位移計測量誤差以及傳感器測量誤差引起。
質心誤差:δ質心=δ距+δ傳
其中:δ距-光柵尺和位移計精度引起的誤差;
δ傳-稱重傳感器測量誤差引起的誤差。
1)光柵尺和位移計直接影響測試結果,本案選擇光柵尺和位移計測距總誤差:δ距=0.02+0.1=0.12mm
2)傳感器測量誤差引起的質心誤差
根據隨機誤差傳遞公式,由函數關系式:
三只稱重傳感器的量程分別為F1=200kg,F2=F3=100kg,其測量誤差δ1=200×0.02%=0.04kg,δ2=100×0.02%=0.02kg,電子臺秤測量誤差δG=0.02kg。
質心的總誤差為:δ質心=δ距+δ傳=0.12+0.036=0.156 mm<1mm
3.3 偏心誤差
由偏心函數關系式(2)可得偏心誤差。
系統測試過程中F11、F12、F13與F14分別為同一力的四次測量,其測量值相差很小,可以忽略。因此偏心的誤差可簡化為:
測量系統,傳感器精度為0.04Kg,支撐距離L4為680mm,偏心測量誤差為:δe=0.096<0.2mm
3.4 轉動慣量誤差
轉動慣量的誤差主要是由周期測量和阻尼比變化引起的誤差。
3.4.1 周期測量引起的誤差
由于采用成熟測量方法,周期測量誤差引起的轉動慣量的相對誤差為:
該轉動慣量測試系統周期實際測量值為2.58s,測量誤差為0.005s,故周期測量引起的誤差為:
3.4.2 阻尼比變化引起的誤差
轉動慣量的變化影響阻尼比,阻尼比影響轉動慣量,假設加有效負載后轉動慣量是加載前的k倍,k>0,它的影響如下所示:
由于采用標準量柱比較測量法,取標準量柱和待測彈的轉動慣量差值倍數k=200,阻尼比ζ=0.05,阻尼比變化引起的誤差為:
3.4.3 測量總誤差
測量總誤差是周期測量引起的誤差與阻尼比變化引起的誤差之和。
4 測試結果
采用Φ252mm的標準樣柱進行比較測試,其理論值如表1所示。
將標準樣柱固定在測量設備上分別進行測量,其測量結果如表2所示。
同時對測試時間進行了測試,系統完成一次測試時間約8分鐘,采用原分離式測量法完成一次測試約30分鐘,因此大大節約了測試時間,提高了測試效率。
5 結束語
多功能彈靜態參數測試系統采用自動化設計理念,實現了靜態參數的自動化測量,經測試滿足使用指標要求。同時與傳統測試方法相比,測試效率大幅提高,減輕了測試人員勞動強度,因此可廣泛應用于彈的自動化裝配生產線,具有較高的推廣價值。
參考文獻
[1]梁晉文,等.誤差理論與教據處理[M].北京:中國計量出版社,1988.
[2]張欣.虛擬儀器在電子測量中的應用[J].現代電子技術,2001(5):10-11.
[3]吳斌.導彈質量特性測量裝置設計[J].上海航天.2000(2):41—44.
[4]黃得東,吳斌,劉建平.扭擺法測量導彈轉動慣量的誤差分析[J].彈箭與制導學報,2009,29(5)76-78.
[5]張立明.質量質心及轉動慣量一體化測試系統設計[J].哈爾濱工業大學,2013.
[6]梁彥,張馳,梁明.彈體質量質心測量系統的設計實現及其誤差分析[J].戰術導彈技術,2012,(3):29-35.
猜你喜歡
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國生殖健康(2019年2期)2019-08-23 08:12:08
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
產品可靠性報告(2017年7期)2017-09-05 09:49:12
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
汽車觀察(2016年3期)2016-02-28 13:16:26