插電式混合動力汽車的燃油經濟性優化分析
2020-04-30 06:25:32陳亞偉邵毅明程前
華僑大學學報(自然科學版) 2020年2期
陳亞偉, 邵毅明, 程前
(1. 中國汽車工程研究院股份有限公司, 重慶 401147;2. 重慶交通大學 交通運輸學院, 重慶 400074)
采用生態駕駛(節能或經濟駕駛)是提高汽車燃油經濟性的有效途徑.先進駕駛輔助系統(ADAS)的發展,使生態駕駛與交通行程數據的結合成為現實.將生態駕駛作為一個最優控制問題(OCP),在交通約束的前提下,通過對車速的控制,可以減少燃油消耗,這比僅對動力系統進行優化更能減少燃油消耗[1-3].近年來,針對混合動力汽車的能量管理與生態駕駛的研究日益增多.文獻[4-7]指出,在有限交通預測的假設下,可以通過僅使用由行駛過程中分開的兩個階段來表示最佳軌跡;然后,應用兩階段Pontryagin的最值原理(PMP)分析推導出最優控制器的求解公式.文獻[8-10]提出一種具有不同更新頻率和預測步長的3層預測控制方案,頂層計算凸優化問題中的動能和電能,對應的雙變量作為狀態參考和燃油消耗,通過求解瞬時優化的等效消耗最小化策略(ECMS),在實時決策層中以自適應的方式應用到控制系統中.文獻[11-13]將混合動力汽車的能量管理問題分為長預測層荷電狀態(SOC)規劃和短層速度與SOC規劃相結合進行能量管理優化控制.
目前,雖然已經提出了較多的混合動力汽車的控制策略,但是插電式混合動力電動汽車的速度和充電損耗的協同優化仍是一大難題.這是因為對于插電式混合動力汽車(PHEV)來說,電池荷SOC具有寬范圍(通常在10%~90%之間),增加了自由度,且難以選擇最佳參考值[14].針對上述問題,本文首先通過最小化加速度和制動來平滑車速,然后在所得到的平滑速度曲線上對發動機和電動機之間的功率進行分配,以最小化燃料消耗.
1 控制模型的建立
1.1 車輛跟隨子系統
將車速和位置描述為速度優化問題的質點系統,即
(1)
式(1)中:z=[s,v]T,s,v分別表示車輛的位置和速度;a是車輛的加速度.
根據車輛制動和加速極限要求,加速度極限為amin(t)≤a(t)≤amax(t),t為發動機工作時長.根據各路段限速,車速受vmin(t)≤v(t)≤vmax(t)的約束,同時,車輛的位置也受到交通狀況及前車的制約.在任何時候,車輛應具有安全合理的車距,因此有smin(t)≤s(t)≤smax(t).
假設目標車輛的加速度a和速度v的約束條件在優化計算將要執行的時間范圍內是不變的.由于目標車輛的位置取決于其先前車輛的位置sL和速度vL,且受到時變約束,因此設置狀態約束[15]為
(2)
式(2)中:L為車長,L=4.5 m;d為橫向車距,最大橫向車距dmax=3 m,最小橫向車距dmin=1.2 m.
1.2 混合動力子系統
電池荷電狀態是PHEV電池耗散優化的主要狀態,其值主要取決于電池功率Pbatt,即

(3)
式(3)中:Voc,Rbatt,Cbatt分別為電池的開路電壓、內阻和額定電量;PMG1和PMG2分別為發電機和電動機的功率[16],有
PMG1=TMG1·ωMG1+PMG1,loss,PMG2=TMG2·ωMG2+PMG2,loss.
(4)
式(4)中:TMG1,ωMG1分別為發動機的扭矩和轉速;TMG2,ωMG2分別為電動機的扭矩和轉速;PMG1,loss和PMG2,loss分別為發電機和電動機的功率損耗,相關參數可查詢.給定車速v,電動機轉速ωMG2=vK1/Rtire,其中,Rtire為輪胎半徑;K1為最終傳動比.
根據驅動條件可知,驅動扭矩Tdriver滿足
Tdriver=Tout-Tf,Tf≥0.
(5)
式(5)中:Tf為摩擦阻力矩;Tout為動力系統輸出扭矩.


(6)
式(6)中:meff,m,Af分別為車輛的等效質量、實際質量和迎風面積;Cf為滾動阻力系數;Cd為空氣阻力系數;ρ為空氣密度;θ為路面坡度,假設θ為已知量且下坡為正;g為重力加速度.
發電機、電動機和發動機的速度由動力分配裝置(PSD,行星齒輪組)耦合得到,即
ωMG1S+ωMG2K2R=ωe(R+S).
(7)
式(7)中:S和R分別為太陽齒輪和齒圈的半徑;ωe為發動機轉速;K2為電動機減速比.
發電機扭矩TMG1,電動機扭矩TMG2,發動機扭矩Te和離合器扭矩Tcl的耦合關系如下:1) 在混合動力汽車(HV)和電動汽車(EV)模式下,TMG1+F·S=0,Te-F·(R+S)=0;2) 在雙電機驅動(DM)模式下,TMG1+F·S=0,Tcl-F·(R+S)=0.其中,F為不同齒輪之間的相互作用力.離合器扭矩Tcl傳遞齒輪反作用力F時,發動機停止工作,且發電機產生反向扭矩.
發動機扭矩Te和發電機扭矩TMG1通過反作用力F結合到齒圈扭矩Tr,即Tr=F·R.
在輸出軸上,由齒圈傳遞的扭矩與電動機傳遞的扭矩之和為Tout,即Tout=(TMG2+K2Tr)K1.

考慮到實際行駛情況,設置約束條件[17],有

(8)
2 順序優化方法
2.1 基于交通約束的速度平滑
通過使加速度最小化來平滑速度,將連續時間車輛跟隨子系統轉化為離散時間系統,得到離散時間下的線性時不變系統為

(9)
式(9)中:zk=[sk,vk]T為車輛狀態;ak為時刻k的加速度;ts為采樣時間;狀態變量X=[zT1,zT2,…,zTN],N為步長上限;控制輸入變量U=[a0,a1,…,aN-1]T.由順序控制輸入U可以得到執行的最小化加速度值,該問題可以轉化為多維約束優化問題.目標函數J1具有以下形式
(10)
式(10)中:D為約束向量;W為交通約束矢量;T為扭矩向量;z0=[s0,v0]T是車輛的初始位置和速度.控制約束可由狀態約束得到,這是一個標準線性二次(LQR)最優控制問題,用Matlab二次規劃(QP)求解器求解.
2.2 最低油耗問題的規劃
在連續時間內,對最低油耗問題進行數學規劃,則

(11)
式(11)中:J2為油耗函數;x=SOC;u=[ωe,Te]T;ω=[Tdriver,v]T.
該問題的哈密頓形式為

(12)
根據Pontryagin的最值原理(PMP)的必要條件,原始最優控制問題的解[8]需要滿足
(13)
最后,對兩點邊值問題(TPBVP)進行數值求解.
3 控制器性能評價與分析
3.1 制定基線能量管理策略
1) 耗散電量(CD).強制系統在電動汽車(EV)模式下運行,此時Te=0,ωe=0,直到電池SOC低于指定的終端SOC值,車輛將立即進入混合動力汽車(HV)模式.車輛即將進入HV模式時刻的SOC值記為SOC(th).
2) 充電持續(CS).用SOC0=SOC(th)來制定剩余行程的最低油耗問題.車輛在HV模式下運行,其中,Te和ωe是通過優化算法確定的,這有助于實現剩余行程的最低油耗.在此期間,電池以與生產PHEV上的充電維持模式類似的方式輔助發動機.
3.2 兩種組合行駛模式的評價
為了評估控制器的性能,通過組合3種典型的測試循環來創建不同的行駛模式,包括城市道路循環(UDDS)、公路燃油經濟性測試(HWFET)和US06補充測試工況.選取兩種場景作為兩種極端情況,以此評價不同行駛模式的燃油經濟性,兩種組合行駛模式,如表1所示.
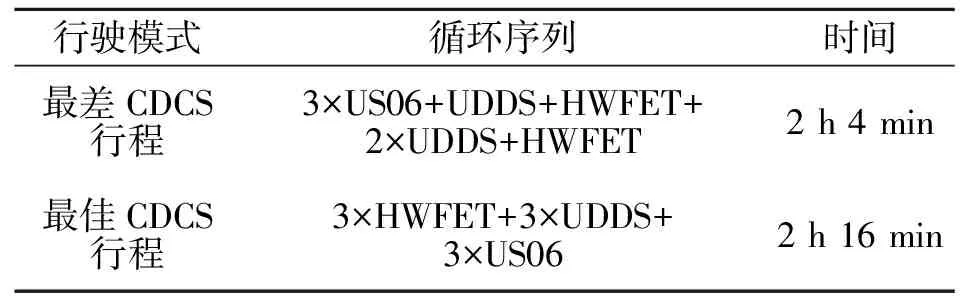
表1 兩種組合行駛模式Tab.1 Two combined driving modes
1) 最差CDCS行程.此種工況下,CDCS策略在真實速度曲線上的結果遠非最佳.該行程在開始時需要高功率,采用最佳耗散策略時,發動機一開始就會處于結合狀態,這可以儲存更多的電能以供后續行程使用.但因為最初的高功率需求,電能將很快耗盡,發動機必須在行程的其余部分進行接合,以保持最低SOC水平.
2) 最佳CDCS行程.此種工況下,CDCS策略在真實速度曲線上的結果接近最優.該行程開始時動力需求低且車速高,因此,系統首先使用電池中的電能,當高功率需求的行程結束時,再結合發動機.
最差CDCS行程總行程距離為107.62 km,行程時長為2 h 4 min 5 s.最佳CDCS行程總行程距離為124.12 km,行程時長為2 h 16 min 51 s.在這兩種情況下,所述循環的總行程能量都超過了模擬車輛的可用電池能量,表明所提出的充電耗散策略具有一定的效果,可以節省燃油消耗.車輛仿真中設計的速度和能量管理策略,如表2所示.

表2 車輛仿真中設計的速度和能量管理策略Tab.2 Speed and energy management strategies designed in vehicle simulation
4 仿真結果分析
兩種不同行駛模式的仿真結果,如圖1所示.圖1中:PD為驅動功率;G為燃油消耗質量.由圖1可知:在最差CDCS行程中,速度和電能耗散順序優化策略(SV-OCBD)的總油耗比實際速度曲線上的基線耗散策略(RV-CDCS)降低了13.74%;而在最佳CDCS行程中,相對于實際速度曲線上的基線耗散策略(RV-CDCS),速度和電能耗散的順序優化策略(SV-OCBD)總油耗降低了7.07%.
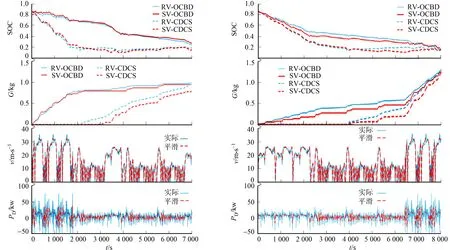
(a) 最差CDCS行程 (b) 最佳CDCS行程圖1 兩種不同行駛模式的仿真結果Fig.1 Simulation results of two different driving modes
在最差CDCS行程中,RV-OCBD策略相對于RV-CDCS策略有更好的效果,不僅使發動機在進入混合動力(HV)模式后在最高效點工作,而且在后續行程中仍持續輸出動力.
不同情況下的燃料消耗、發動機啟動時間和能耗結果,如表3所示.表3中:δ為燃油減少占比;QB為制動能量;QD為驅動能量;S為純電動行駛里程.由表3可知:與RV-CDCS策略相比,RV-OCBD策略減少了發動機在中功率區域運行的總時間;與給出的最佳SOC耗散策略相比,基于實際速度的基線策略具有更長的發動機運行時間;然而,對于最佳的CDCS行程,在行程開始時的功率需求是中等負荷,而在行程結束時出現高功率需求,這不利于節省電能以增加續駛里程.因此,與RV-OCBD策略相比,在行程的后半段使用發動機的RV-CDCS策略是最優的.
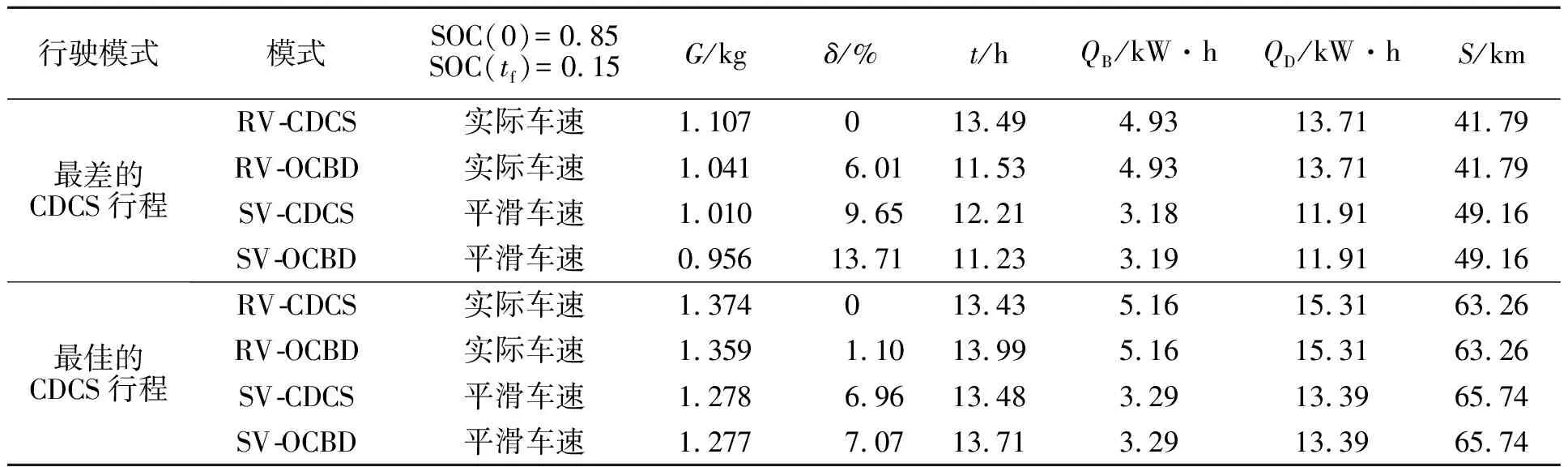
表3 不同情況下的燃料消耗、發動機啟動時間和能耗結果Tab.3 Fuel consumption, engine start time and energy consumption results under different conditions
最佳CDCS行程的仿真結果表明,平滑速度即使對電池充電的效率優化較低,也能顯著提高插電式混合動力汽車的燃油經濟性;同時,平滑的速度也有助于汽車的穩定性和舒適性.
5 結論
在給定交通約束條件下,對一種輕型插電式混合動力汽車(PHEV)的速度曲線順序優化的方法及相應的充電損耗策略進行研究.為了評價該方法的有效性,給出并分析兩種不同功率需求模式下的行程結果.仿真結果表明,混合動力汽車的燃油消耗有所下降,所設計的順序控制策略具有一定的優越性.由此得到以下3點結論.
1) 平滑的速度策略顯著降低了平均功率需求.行程開始時,較低的電能需求使在切換到表3的混合模式之前(使用CDCS),可以行駛更長的里程.
2) 降低發動機驅動力比優化充電效率更能減小總的燃油消耗.即與RV-CDCS策略相比,SV-CDCS策略具有更好的節能性.
3) 速度平滑與電能損耗之間有耦合性.由于加速度最小化的控制方法減小了不必要的制動,SV情況下電池SOC的下降高于RV情況下電池SOC的下降.總的來說,SV減少了再生制動的機會,它避免了一些制動的操作和不必要的加速,因此,其節能效果更好.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:32:50
小學生作文(低年級適用)(2019年9期)2019-10-08 08:37:10
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
數學大世界(2018年1期)2018-04-12 05:39:14
汽車與新動力(2015年1期)2015-02-27 12:11:01
時代英語·高三(2014年5期)2014-08-26 02:49:51