淺析自動駕駛分類及發展前景
2020-05-06 09:09:50張艷徐順藺春明趙璽徐業翔彭宏偉
汽車實用技術 2020年6期
張艷 徐順 藺春明 趙璽 徐業翔 彭宏偉
摘 要:文章結合《汽車駕駛自動化分級》標準,簡述了標準分級的定義,并根據實際應用,與具體功能、配置對應起來,論述自動駕駛分類及發展前景。
關鍵詞:駕駛輔助;自動駕駛
中圖分類號:V323 ?文獻標識碼:A ?文章編號:1671-7988(2020)06-40-03
Abstact: Combined with the standard of automobile driving automation classification, this paper briefly describes the definition of the standard classification, and discusses the classification and development prospect of automatic driving according to the practical application and the specific function and configuration.
Keywords: Driving Assistance; Autonomous Driving
CLC NO.: V323 ?Document Code: A ?Article ID: 1671-7988(2020)06-40-03
引言
2020年3月9日,工信部官網上掛出《汽車駕駛自動化分級》推薦性國家標準報批稿,擬于2021年1月1日開始實施。 這是關于自動駕駛汽車的分級第一次有國家標準的形式明確。但用戶在選購車輛時并不能直接的判斷出來自己購買的汽車到底具備L級級別的功能,所以將標準的分級與具體功能、配置對應起來,談一談自動駕駛的分類與發展前景。
1 自動駕駛的概念及意義
1.1 自動駕駛汽車
自動駕駛汽車是指通過搭載先進傳感器等裝置,運用人工智能等新技術,具有自動駕駛功能,逐步成為智能移動空間和應用終端的新一代汽車。又稱為智能汽車或者智能網聯汽車等。
1.2 自動駕駛的意義
自動駕駛汽車使用視頻攝像頭、雷達傳感器以及激光測距器來了解周圍的交通狀況,并通過一個詳盡的地圖對前方的道路進行導航。因而,其交通事故發生率可以極大的降低。自動駕駛汽車的行駛模式可以更加節能高效,對交通擁堵及空氣的污染將得以減弱。
2 自動駕駛的標準分級
此標準中,基于自動執行動態駕駛任務的程度,在駕駛任務中的角色分配及條件限制,將自動駕駛等級分成 0~5 級。
2.1 0級駕駛自動化(應急輔助)
車輛的自動駕駛系統雖然不能控制汽車的轉向或加減速,但是具備一定的路況識別和反應能力,比如能夠在危險出現的時候提醒駕駛員并能輔助或短暫介入輔助駕駛員駕駛。
如車道偏離預警、前碰撞預警、自動緊急制動等都屬于自動駕駛應急輔助功能范疇(定速巡航、電子穩定性控制因不具備自動探測相應能力,不屬于自動駕駛應急輔助功能)。
2.2 1級駕駛自動化(部分駕駛輔助)
1級自動駕駛汽車和0級自動駕駛汽車一樣,都屬于有限制條件的自動駕駛,不同之處在于,1級中車輛能實現小部分功能的自動化操作,例如自動加減速或轉向。一般來講自適應巡航、自動剎車、車道保持輔助等這些功能就屬于1級自動駕駛的范圍。
2.3 2級駕駛自動化(組合駕駛輔助)
2級別比1級別的自動化程度高很多,2級自動駕駛包含的功能有:acc自適應巡航、主動車道保持、自動泊車、路牌識別、自動變道等功能。
目前而言,我們使用的2級別自動駕駛其實只能算是“駕駛輔助系統”,它還完全無法離開人工的干預。因此在使用的時候還是要我們隨時注意著道路的變化。
2.4 3級駕駛自動化(有條件自動駕駛)
到3級,自動駕駛系統在所規定的運行條件下,車輛本身就能完成轉向和加減速,以及路況探測和反應的任務。能夠在或長或短的時間段內代替駕駛者承擔操控車輛的職責,但是仍需駕駛者對駕駛活動進行監控。能夠有條件實現TJP交通擁堵輔助功能目前整體技術處于2級到3級轉變階段。
2.5 4級駕駛自動化(高度自動駕駛)
4級自動駕駛汽車仍屬于有限制條件的自動駕駛,但是汽車的方向和加減速控制,路況觀測和反應,以及汽車故障時的接管任務都能夠由自動駕駛系統完成,不需要人類參與。而按照這一界定,無人出租車便屬于4級自動駕駛。
2.6 5級駕駛自動化(完全自動駕駛)
5級自動駕駛汽車和4級自動駕駛汽車能夠實現的基本功能相同,但5級自動駕駛汽車不再有運行條件的限制(商業和法規因素等限制除外),同時自動駕駛系統能夠獨立完成所有的操作和決策。
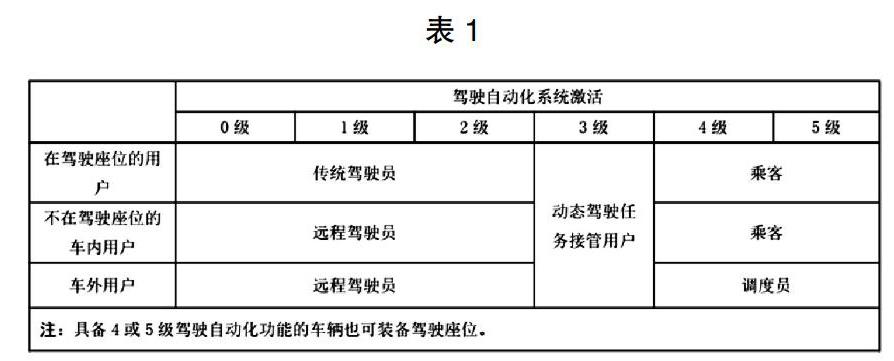
在高級別的自動駕駛中,駕駛員的身份逐漸向乘客轉變。在0級至2級自動駕駛中,監測路況并做出反應的任務由駕駛員和系統共同完成,4至5級自動駕駛中,駕駛員完全轉變為乘客的角色,車輛甚至可以不再裝備駕駛座位。
駕駛自動化系統激活后用戶的角色如下表1:
3 常見的駕駛輔助系統
3.1 車道偏離預警功能(LDW)
功能:對在不經意間離開標記車道發出警告
原理:系統通過前視攝像頭監控路面車道線,當系統監控到車輛在無意識偏離車道,即將壓線前,系統會發出報警信號,通過儀表的聲音和視覺預警對駕駛員進行警示,以提示駕駛員盡快接管車輛方向盤。
3.2 前向碰撞預警功能(FCW)、行人碰撞預警功能(PCW)
通過前視攝像頭,監控道路車輛信息,以識別前方車輛,在即將碰撞前的3~4秒,系統將發出兩級報警信息,激活儀表報警圖像及聲音,提醒駕駛員盡快接管車輛,采取避讓措施。
攝像頭同時可以識別行人特征,在碰撞前發出預警信息,實現行人碰撞預警PCW。
3.3 智能大燈控制
功能:確保最佳道路照明。
原理:智能大燈控制可以借助一個攝像頭測量環境亮度,并識別到前方行駛車輛或迎面來車及其距離。這些數據被用來實現各種燈光功能。
近光燈激活功能可以根據當前的光線情況自行打開或關閉車輛的近光燈。
遠光燈激活功能可以讓駕駛員盡可能頻繁地使用遠光燈行車,而無需手動打開或關閉。如果該功能未識別到其他車輛,就會激活遠光燈。如果該功能探測到其他車輛,則會關閉遠光燈。
根據視頻數據還可以自動調節近光燈或遠光燈的照明范圍。自適應近光燈控制功能可以將近光燈的水平高度與車道輪廓持續匹配。尤其是在上坡或崎嶇的路面上時,總是能夠保持良好的車道照明,而不會讓其他駕駛員眩目。
3.4 自適應巡航控制(ACC)
功能:幫助駕駛員調整車速,并與前方車輛保持安全距離。
原理:在行駛過程中,ACC保持由駕駛員預先設定的車速,通過自行收油門、制動或加速而與變化的交通狀況相適應。ACC的另一版本“停走型ACC(Stop&Go)”還能將車輛自行制動到停止,并在駕駛員確認后自動重新啟動車輛。
配置該功能的情況下,自適應巡航激活過程中,如前方有車輛低于自車車速,系統可自動控制本車減速以跟隨前方車輛,并在前方無車時自動提速至巡航車速。可在一定條件下完全解放雙腳。
3.5 疲勞駕駛監控預警_邏輯型(DFM)
功能:駕駛員處于疲勞狀態時提供警報,從而防止或減少由于疲勞駕駛引起的交通事故。
原理:根據駕駛行為,在車輛壓線行駛或突變轉向等異常行駛事件頻繁發生時,系統會通過內部算法逐漸累計疲勞值,并在疲勞值達成閾值時,通過聲光報警,提示駕駛員停車休息。
當連續駕車超出4個小時,系統也會通過聲光報警,提示休息。
3.6 車道保持輔助
功能:主動幫助駕駛員保持在標記的車道中。
原理:車道保持輔助同樣使用攝像頭探測車輛前面的車道標記。如果該功能識別到與車道邊界線的距離小于定義的最小距離,車道保持支持系統就會溫和但明顯地將車輛轉向反方向,從而使車輛保持在車道內。駕駛員可以隨時無視該功能而越權控制,并對車輛操控負責。如果駕駛員在變換車道或轉彎時打開轉向信號燈,則該功能不進行干預。
3.7 車道變道輔助
功能:在變道時對碰撞危險做出警告。
原理:該系統以監控車輛側面和斜后方區域的雷達傳感器為基礎。如果系統探測到盲區中的車輛或從后方高速駛來的車輛,則以視覺形式警告駕駛員,例如在車側后視鏡中顯示一個發光符號。在駕駛員因需要變道而打開了轉向燈的情況下,該系統還能發出聽覺和/或觸覺警告,提醒駕駛員注意潛在的危險。
3.8 自動緊急制動功能(AEB)
功能:在即將發生追尾事故的情況下,幫助駕駛員防止事故的發生或者至少降低事故的嚴重程度。
原理:利用雷達偵測和前車的距離,根據兩車的相對速度的碰撞風險做出警報,如果做出警報后駕駛者并無任何反應,當安全距離小于范圍內,AEB系統就會啟動,自動介入汽車的剎車系統,以減輕或避免碰撞。
為此,系統持續計算汽車為避免碰撞所需的減速度。如果系統識別到駕駛員的制動強度不夠,則會增加制動壓力使車輛盡可能在障礙物前停止,以最大限度地避免碰撞。
如果駕駛員未做出任何反應并且系統預估碰撞不可避免,則會觸發完全制動,以盡可能地減輕碰撞后果。
除上述常見輔助功能外,還有車距監控預警功能,自動泊車輔助系統,剎車輔助系統,倒車輔助系統,行車輔助系統等。自動駕駛技術的研發在近幾年來進行得如火如荼,目前在市面上的部分車型已經搭載了2級別的自動駕駛系統。
4 發展前景
自動駕駛汽車(智能汽車)搭載先進傳感器等裝置,運用人工智能等新技術,具有自動駕駛功能,逐步成為智能移動空間和應用終端等新一代汽車。
在提升傳統汽車的智能化技術應用同時,面臨內核需要重新定義的挑戰,智能汽車需要從“機械產品”向“智能終端”的系統重塑,打造協同共生的智能出行生態。
(1)傳統的汽車E/E架構精簡化,形成面向3級及更高等級自動駕駛的高算力架構,具備高速車載以太、(跨)域集中化E/E、軟件定義汽車、學習迭代等特性。
(2)以智能網聯、自動駕駛、 機器學習、大數據、個性化需求融合,將會實現跨界融合。
(3)與智慧交通、智慧城市協同的智能駕駛服務及其所帶來的高效的價值,更被消費者所認同。
(4)人車環境的融合感知,邊云結合的智能計算、智能決策與智能控制的高度協同;智能汽車將成為一個持續創造價值的平臺。
高速路上的自動駕駛技術即將實現,但在一般道路等很復雜的交通環境時的應用,依然存在不少課題需要解決,在技術開發方面還需要更多的時間。自動駕駛的實現任重而道遠。
參考文獻
[1] 郭喨,自動駕駛只欠“法律東風”.
[2] GBT 汽車駕駛自動化分級2020.3.
[3] 智能汽車趨勢洞察及消費者調研報告.車云研究院2020.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
公民與法治(2016年4期)2016-05-17 04:09:26
作文大王·低年級(2016年4期)2016-04-18 00:24:37
決策探索(2014年21期)2014-11-25 12:29:50
