轉(zhuǎn)速大波動下滾動軸承智能故障診斷方法研究
2020-05-13 14:31:40王金瑞李舜酩錢巍巍安增輝張偉
振動工程學(xué)報(bào) 2020年2期
關(guān)鍵詞:深度學(xué)習(xí)故障診斷
王金瑞 李舜酩 錢巍巍 安增輝 張偉
摘要:機(jī)械中普遍存在的轉(zhuǎn)速大波動工況是影響機(jī)械設(shè)備故障診斷的關(guān)鍵性難題,現(xiàn)有方法在計(jì)算效率及診斷誤差等方面存在缺陷。深度學(xué)習(xí)理論能夠利用深度神經(jīng)網(wǎng)絡(luò)實(shí)現(xiàn)數(shù)據(jù)的自動特征提取和分類。結(jié)合深度學(xué)習(xí)的優(yōu)勢,提出了一種專門用于處理轉(zhuǎn)速大波動工況下的智能故障診斷方法。該方法首先根據(jù)機(jī)械轉(zhuǎn)速信息提取頻域樣本;然后利用頻域樣本訓(xùn)練批標(biāo)準(zhǔn)化的深度神經(jīng)網(wǎng)絡(luò),用批標(biāo)準(zhǔn)化技術(shù)中的平移和縮放參數(shù)能來處理轉(zhuǎn)速大波動下頻域信號的頻移和幅變特性,并減輕深度網(wǎng)絡(luò)內(nèi)部協(xié)變量轉(zhuǎn)移問題,加快網(wǎng)絡(luò)收斂;最后采用兩組特殊設(shè)計(jì)的轉(zhuǎn)速大波動工況下的滾動軸承試驗(yàn)來驗(yàn)證提出方法的性能。研究結(jié)果表明,該方法可克服轉(zhuǎn)速大波動的影響,從而實(shí)現(xiàn)不同軸承故障的準(zhǔn)確識別,并獲得比其他方法更高的準(zhǔn)確率。
關(guān)鍵詞:故障診斷;滾動軸承;深度學(xué)習(xí);轉(zhuǎn)速大波動;批標(biāo)準(zhǔn)化
中圖分類號:TH165+.3;TH133.33文獻(xiàn)標(biāo)志碼:A 文章編號:1004-4523(2020)02-0391-09
DOI:10.16385/j.cnki.issn.1004-4523.2020.02.020
引言
隨著現(xiàn)代制造業(yè)和信息技術(shù)的發(fā)展,交通、能源、航天等領(lǐng)域的機(jī)械設(shè)備如高速列車、航空發(fā)動機(jī)、燃?xì)廨啓C(jī)等都在朝著復(fù)雜化、高速化和智能化發(fā)展,因此可靠的健康監(jiān)測系統(tǒng)也日趨重要。而轉(zhuǎn)速大波動情況下的健康監(jiān)測技術(shù)尚未成熟,考慮轉(zhuǎn)速大波動工況的普遍存在:一是由于機(jī)械設(shè)備啟停產(chǎn)生的大范圍的轉(zhuǎn)速變化,二是在受載荷、工況的影響下出現(xiàn)的轉(zhuǎn)速劇烈波動。由此導(dǎo)致信號征兆與故障模式問的映射關(guān)系變得異常復(fù)雜,給機(jī)械設(shè)備的健康監(jiān)測帶來了極大的挑戰(zhàn)。
轉(zhuǎn)速大波動下機(jī)械設(shè)備動態(tài)信號處理及故障診斷方法的研究開始于2010年,形成的技術(shù)路線主要以階次跟蹤及其衍生方法為主。然而在技術(shù)可操作性和設(shè)備附加成本兩方面都對其發(fā)展帶來了阻礙,而且無法達(dá)到轉(zhuǎn)速劇烈和隨機(jī)波動下信號分析的精度要求。同時,眾多學(xué)者嘗試采用許多相關(guān)的非平穩(wěn)信號分析方法如WVD與cohen類時頻分析、小波變換、故障特征稀疏表示等技術(shù)方法。這些方法在設(shè)備監(jiān)測與診斷領(lǐng)域獲得了廣泛應(yīng)用,但是它們各有自身特點(diǎn)或缺陷,只適合分析某些特定性質(zhì)的信號。機(jī)械設(shè)備的動態(tài)信號在轉(zhuǎn)速大波動下具有調(diào)幅、調(diào)頻、調(diào)相等非平穩(wěn)特征,并且這些特征在時頻域存在強(qiáng)烈耦合。采用以往的時頻分析方法難以有效地解決轉(zhuǎn)速大波動信號在時頻面內(nèi)高分辨顯示的問題。一些改進(jìn)方法或各種方法之問的結(jié)合為時頻分析方法表示能力的提升帶來了希望,如基于STFT或小波變換的同步壓縮技術(shù),時頻融合方法以及自適應(yīng)時頻濾波等技術(shù)方法。但它們依然未能完善地解決任意目標(biāo)高精度的時頻表示,同時也無法實(shí)現(xiàn)轉(zhuǎn)速大波動工況下機(jī)械故障的智能診斷。
由于計(jì)算機(jī)網(wǎng)絡(luò)技術(shù)的迅猛發(fā)展和“大數(shù)據(jù)”時代的到來,深度學(xué)習(xí)理論作為一種大數(shù)據(jù)處理工具,其研究與應(yīng)用已經(jīng)取得突破性進(jìn)展。深度學(xué)習(xí)已經(jīng)在圖像、語音識別等領(lǐng)域的大數(shù)據(jù)分析上取得了長足進(jìn)步。同時在機(jī)械智能故障診斷領(lǐng)域也吸引了廣泛關(guān)注:雷亞國等采用對頻域信號加噪的方法設(shè)計(jì)了五層去噪自動編碼器(DAE),并成功的應(yīng)用到了多齒輪傳動旋轉(zhuǎn)部件的故障診斷中。賈峰等建立了五層疊加自動編碼器(SAE)將信號的頻譜特征作為輸入,并對不同負(fù)載和轉(zhuǎn)速下的旋轉(zhuǎn)軸承故障進(jìn)行了診斷,診斷準(zhǔn)確率幾乎達(dá)到100%。趙銳等提出了基于長短時記憶算法(LSTM)的機(jī)械健康監(jiān)測方法,并應(yīng)用到了機(jī)械工具磨損監(jiān)測中,通過對比發(fā)現(xiàn)深度LSTM模型優(yōu)于淺層模型。Janssens等利用二維CNN對4種不同的旋轉(zhuǎn)機(jī)械故障類型進(jìn)行了識別,該模型包含一個卷積層和一個連接層,Softmax作為頂部的分類層。
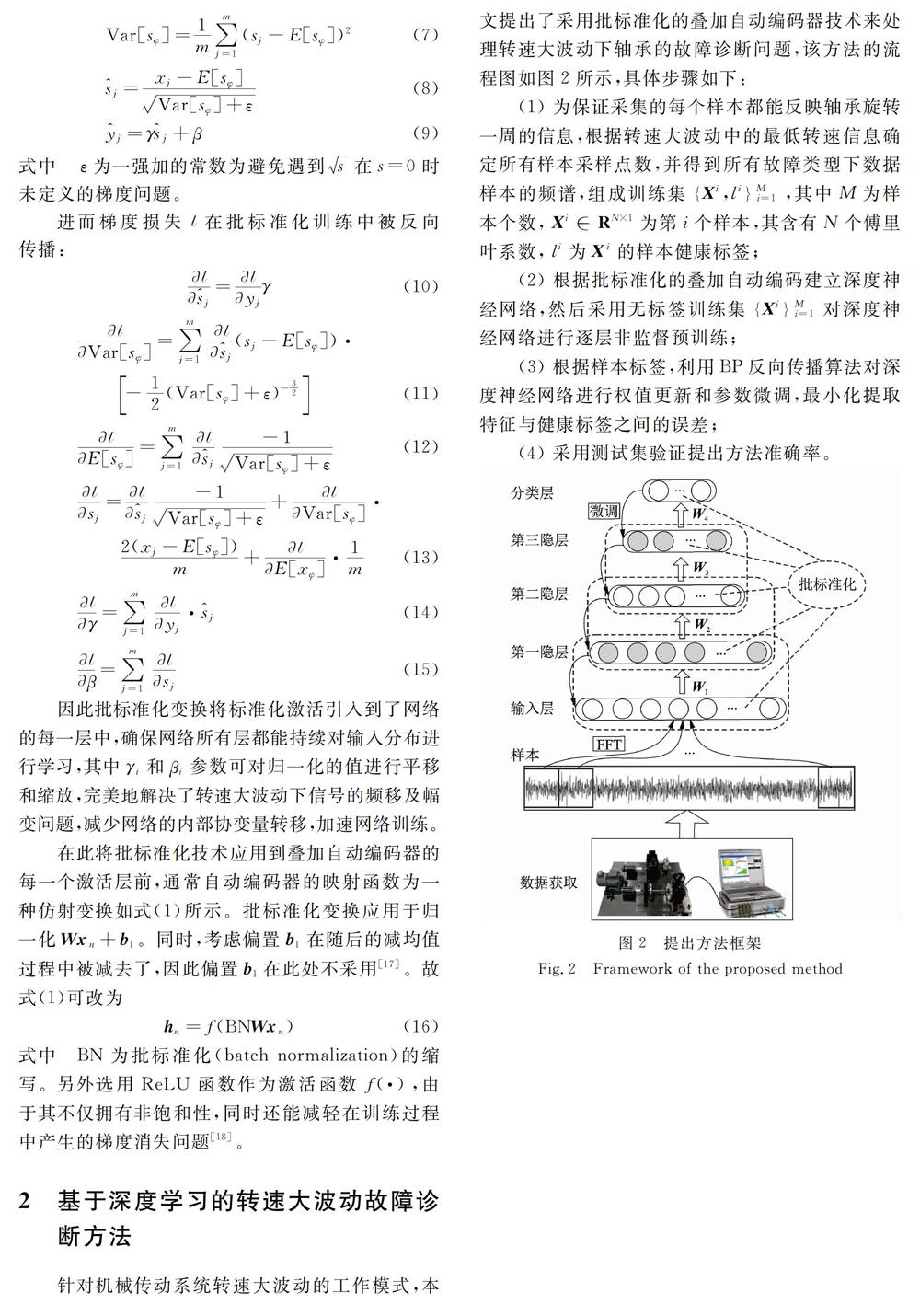
鑒于深度學(xué)習(xí)強(qiáng)大的表征能力,本文嘗試將深度學(xué)習(xí)理論運(yùn)用到轉(zhuǎn)速大波動下軸承的智能診斷模型的設(shè)計(jì)中,以實(shí)現(xiàn)軸承的智能監(jiān)測與診斷。同時考慮到轉(zhuǎn)速大波動下振動頻域信號產(chǎn)生的頻移及幅變特性,使得深度網(wǎng)絡(luò)在訓(xùn)練期問的內(nèi)部協(xié)變量轉(zhuǎn)移問題加劇,網(wǎng)絡(luò)訓(xùn)練更加困難。考慮在每一網(wǎng)絡(luò)激活層中加入一種深度神經(jīng)網(wǎng)絡(luò)優(yōu)化技術(shù)——批標(biāo)準(zhǔn)化算法,其特設(shè)的平移和縮放參數(shù)可以完美地解決轉(zhuǎn)速大波動下的頻移及幅變問題;同時通過歸一化每層的輸人來減少內(nèi)部協(xié)變量轉(zhuǎn)移,并大大地加快深度神經(jīng)網(wǎng)絡(luò)的收斂。本文首先根據(jù)機(jī)械的轉(zhuǎn)速信息提取故障樣本的頻域信號,然后將其輸入到批標(biāo)準(zhǔn)化的深度神經(jīng)網(wǎng)絡(luò)中進(jìn)行訓(xùn)練,最后采用Softmax回歸作為分類器實(shí)現(xiàn)轉(zhuǎn)速大波動下的智能故障診斷。隨即以兩種特殊設(shè)計(jì)的轉(zhuǎn)速大波動軸承故障試驗(yàn)為例驗(yàn)證了提出方法的有效性。
1批標(biāo)準(zhǔn)化的深度神經(jīng)網(wǎng)絡(luò)
選用疊加自動編碼器經(jīng)逐層訓(xùn)練構(gòu)成深度神經(jīng)網(wǎng)絡(luò),Softmax回歸判別結(jié)構(gòu)作為分類層,將批標(biāo)準(zhǔn)化技術(shù)應(yīng)用到網(wǎng)絡(luò)的每一激活層中,建立具有診斷監(jiān)測能力的深度神經(jīng)網(wǎng)絡(luò)模型。
1.1疊加自動編碼器
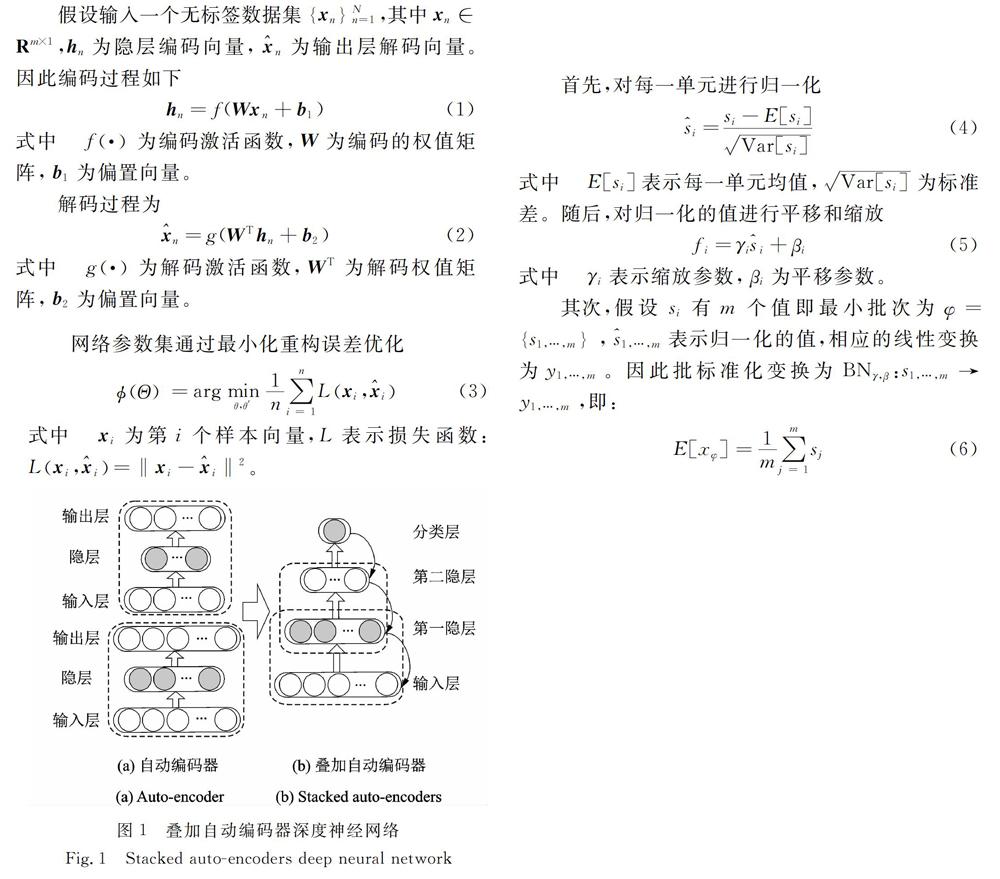
疊加自動編碼器的基本組成單元為自動編碼器結(jié)構(gòu)。一個自動編碼器為對稱的三層神經(jīng)網(wǎng)絡(luò):輸入層、隱藏層和輸出層,結(jié)構(gòu)如圖1(a)所示。其學(xué)習(xí)過程為非監(jiān)督學(xué)習(xí)方式,包含編碼和解碼過程:編碼用于將輸人信號映射成隱層表達(dá),解碼是對隱層表達(dá)的重構(gòu)。
將自動編碼器逐層疊加,即第一隱層為第二層輸入,由此構(gòu)成深度網(wǎng)絡(luò)結(jié)構(gòu),如圖1(b)所示。構(gòu)成的深度神經(jīng)網(wǎng)絡(luò)采用非監(jiān)督學(xué)習(xí)方式實(shí)現(xiàn)逐層訓(xùn)練,Softmax回歸分類器與標(biāo)簽數(shù)據(jù)相結(jié)合,經(jīng)BP算法實(shí)現(xiàn)網(wǎng)絡(luò)權(quán)值更新和參數(shù)微調(diào)。
1.2批標(biāo)準(zhǔn)化
批標(biāo)準(zhǔn)化可以用一種優(yōu)雅的方式重參數(shù)化幾乎所有的深度神經(jīng)網(wǎng)絡(luò),其過程可以應(yīng)用于每一個激活層而無需參數(shù)調(diào)節(jié)。它可以通過一個獨(dú)立的方式來標(biāo)準(zhǔn)化矩陣的每一行使其具有零均值和單位方差。假設(shè)一個k維輸人向量s=(s1…sk),為提升訓(xùn)練及減少內(nèi)協(xié)變量轉(zhuǎn)移問題,批標(biāo)準(zhǔn)化技術(shù)采用兩個必要的簡化步驟:
3試驗(yàn)驗(yàn)證
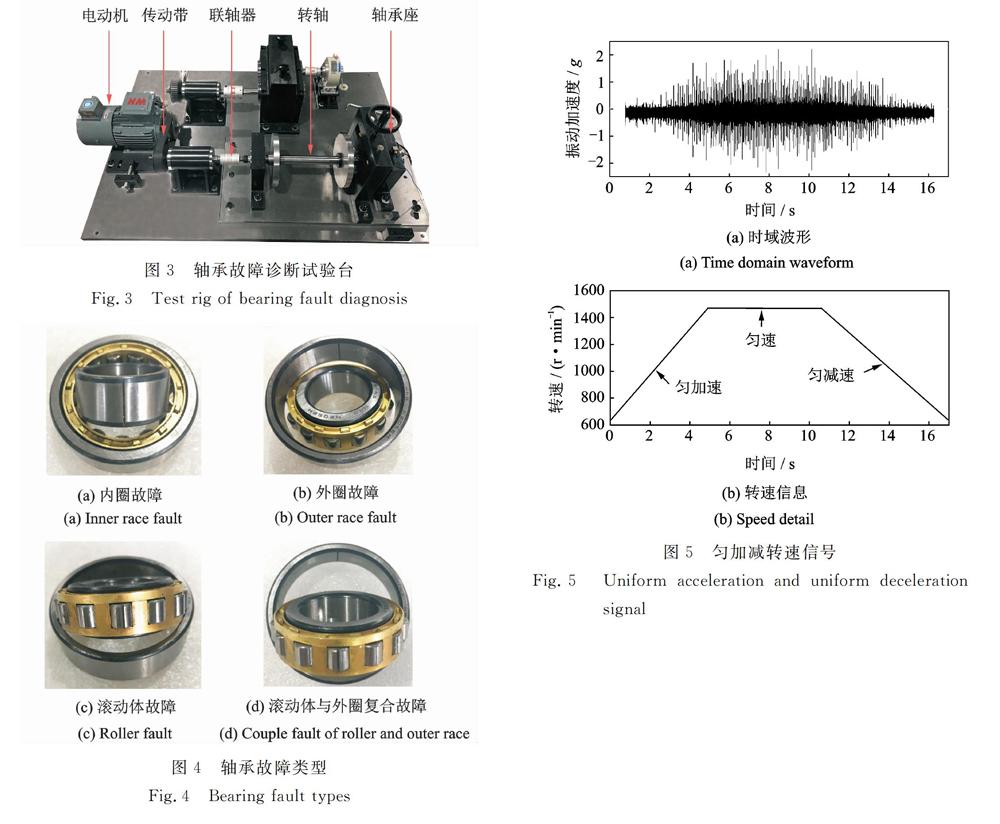
本文以軸承為研究對象,根據(jù)提出方法,采用兩種特殊設(shè)計(jì)的軸承轉(zhuǎn)速大波動試驗(yàn)來驗(yàn)證提出方法的有效性。軸承故障診斷試驗(yàn)臺如圖3所示,驅(qū)動電機(jī)額定功率為0.75kW,軸承型號為QPZZ-II型NU205EM圓柱滾子軸承。故障設(shè)置為在軸承表面用線切割技術(shù)切出的方形凹槽,凹槽寬0.5mm、深0.5mm。共模擬設(shè)置了軸承的5種健康狀況:正常、內(nèi)圈故障、外圈故障、滾動體故障、滾動體與外圈復(fù)合故障。故障軸承如圖4所示,在軸承座上表面安裝振動加速度傳感器,設(shè)置采樣頻率為25.6kHz。
3.1勻加減轉(zhuǎn)速大波動軸承試驗(yàn)
設(shè)置軸承轉(zhuǎn)速從640r/min勻加速升到1500r/min,再從1500r/min勻減速到640r/min。以內(nèi)圈故障軸承為例,時域波形如圖5(a)所示,經(jīng)LMS數(shù)據(jù)采集設(shè)備提取轉(zhuǎn)速信息如圖5(b)所示。根據(jù)最低轉(zhuǎn)速及采樣頻率,取每個樣本2400個數(shù)據(jù)點(diǎn),經(jīng)FFT變換得1200個傅里葉系數(shù)。每種故障類型取200個樣本,共1000個樣本。之所以選用頻譜是由于時域樣本有時移特性,即在同一故障的不同樣本中,故障特征點(diǎn)的位置很難保證一致,由此給特征提取帶來較大困難;其次在深度神經(jīng)網(wǎng)絡(luò)中,輸入分類器的每一個信號的長度都會影響準(zhǔn)確率。因此為了包含足夠的信息并獲得較好的結(jié)果,就需要信號尺寸足夠大,然而過大的尺寸必然會導(dǎo)致網(wǎng)絡(luò)結(jié)構(gòu)的復(fù)雜化及訓(xùn)練時問加長。而頻譜信息不僅可以從測試信號中通過FFT輕松獲取軸承健康狀況更豐富的信息,而且更加規(guī)則化的特征分布克服了時域信號的時移特性;同時頻譜長度比時域信號尺寸縮短一半,減少了網(wǎng)絡(luò)的計(jì)算成本。
參照文獻(xiàn)[11],本文網(wǎng)絡(luò)結(jié)構(gòu)設(shè)置共5層,每層神經(jīng)元個數(shù)分別為1200,600,200,100和5。試驗(yàn)中隨機(jī)選取40%的樣本進(jìn)行訓(xùn)練,其余樣本用于測試。為減少隨機(jī)因素的影響,試驗(yàn)重復(fù)進(jìn)行15次。每層迭代次數(shù)為20次,學(xué)習(xí)率為10-4,批尺寸為10。
診斷結(jié)果如圖6所示,可以看出15次試驗(yàn)的訓(xùn)練準(zhǔn)確率均為100%,平均測試準(zhǔn)確率為98.8%。因此足以說明提出的方法能夠排除轉(zhuǎn)速大波動的干擾,準(zhǔn)確識別軸承的5種不同的健康狀況。為了對比提出方法的準(zhǔn)確性,采用如下3種方法進(jìn)行對比:
(1)對比方法1:采用時域信號作為輸入,網(wǎng)絡(luò)結(jié)構(gòu)為2400-1200-600-200-100-5,其余參數(shù)設(shè)置與提出方法相同;
(2)對比方法2:未加批標(biāo)準(zhǔn)化算法的深度神經(jīng)網(wǎng)絡(luò),參數(shù)設(shè)置與文獻(xiàn)[12]相同。
(3)對比方法3:多隱層反向傳播神經(jīng)網(wǎng)絡(luò)BPNN,結(jié)構(gòu)與本方法相同。
同樣進(jìn)行15次試驗(yàn),得到平均訓(xùn)練和測試準(zhǔn)確率如表1所示。可以看出提出方法在測試準(zhǔn)確率上都遠(yuǎn)遠(yuǎn)高于其他方法,對比方法1的訓(xùn)練準(zhǔn)確率雖同樣達(dá)到了100%,但其測試準(zhǔn)確率只有27.13%,這充分說明了時域信號的頻移和幅度特性對測試樣本產(chǎn)生的不利影響,雖然訓(xùn)練準(zhǔn)確率很高,但是在測試魯棒性上遠(yuǎn)遠(yuǎn)低于頻域信號。對比方法2和3無論在訓(xùn)練還是測試準(zhǔn)確率上都低于本方法,由此體現(xiàn)出批標(biāo)準(zhǔn)化算法在處理頻移和幅變特性數(shù)據(jù)上的優(yōu)越性。圖7為3種方法的訓(xùn)練誤差曲線,通過對比可以發(fā)現(xiàn),提出方法不僅能夠在20次迭代步數(shù)中更快地收斂到0,而且在迭代初始階段便在一個很低的訓(xùn)練誤差0.2下進(jìn)行。對比方法1的初始訓(xùn)練誤差為0.39,對比方法2和3無論在初始誤差及第20步誤差上均無法與提出方法相媲美。
為驗(yàn)證提出方法的特征提取能力,利用t-SNE[20]技術(shù)將學(xué)習(xí)到的高維特征映射成三維特征向量進(jìn)行可視化,結(jié)果如圖8(a)所示。可以看出除兩個復(fù)合故障的樣本與內(nèi)圈故障混合,一個內(nèi)圈故障樣本與滾珠故障混合外,其余不同類型的軸承樣本都很好地區(qū)分出來,相同類型的樣本都聚集在了一起。圖8(b),(c)所示為對比方法1和2的降維結(jié)果(方法3效果太差,在此不予展示),可以看出不同健康狀況的軸承樣本散點(diǎn)互相交錯,完全沒有呈現(xiàn)出聚集模式,說明這兩種方法相比于提出方法對勻加減轉(zhuǎn)速大波動下的故障特征提取能力上明顯不足。
為進(jìn)一步說明批標(biāo)準(zhǔn)化技術(shù)中yi和βi參數(shù)的作用,隨機(jī)選取了3個不同轉(zhuǎn)速(700,1000,1300r/min)下的內(nèi)圈故障樣本進(jìn)行說明,如圖9所示。從圖9(d),(e)可以看出3種轉(zhuǎn)速下樣本的低頻部分發(fā)生頻移和幅變現(xiàn)象明顯,高頻部分幅變現(xiàn)象明顯。將其輸入到批標(biāo)準(zhǔn)化的神經(jīng)網(wǎng)絡(luò)中后,得到各層的特征變化如圖10所示,可以看出隨著層數(shù)的增加,網(wǎng)絡(luò)學(xué)習(xí)到的特征逐漸趨向統(tǒng)一。圖11為未加批標(biāo)準(zhǔn)化得到的第三隱層特征向量圖,可以看出3個特征向量趨勢混亂,無法用于樣本分類。由此可以得出批標(biāo)準(zhǔn)化技術(shù)通過yi和βi逐層對樣本特征進(jìn)行平移和縮放,使得最終提取的特征歸于同一趨勢,以此解決了轉(zhuǎn)速大波動下信號的頻移及幅變特性帶來的診斷困難問題。
3.2無規(guī)律轉(zhuǎn)速大波動軸承試驗(yàn)
設(shè)置軸承轉(zhuǎn)速在800r/min到1500r/min之問無規(guī)律波動,同樣以內(nèi)圈故障軸承為例,其轉(zhuǎn)速信息如圖12所示,持續(xù)采樣時問為32s。每種故障類型取360個樣本,總共1800個樣本。建立的深度神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)及參數(shù)設(shè)置不變。
采用10%的樣本進(jìn)行訓(xùn)練,其余樣本進(jìn)行測試,得到15次訓(xùn)練及測試準(zhǔn)確率如圖13所示。可以看出提出方法在更少的訓(xùn)練樣本百分比的情況下獲得了99.88%的平均測試準(zhǔn)確率,比勻加減轉(zhuǎn)速大波動試驗(yàn)的測試準(zhǔn)確率更高。考慮其原因可能是由于該試驗(yàn)的轉(zhuǎn)速波動較多,同等轉(zhuǎn)速信號樣本會多次重復(fù)采集,且轉(zhuǎn)速變化范圍較小。由此使得測試相對難度較小,且神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)維度也較小,網(wǎng)絡(luò)訓(xùn)練起來相對容易,因此獲得準(zhǔn)確率更高。同時根據(jù)如圖14所示訓(xùn)練誤差及圖15所示特征降維散點(diǎn)圖可以看出,提出方法在處理無規(guī)律轉(zhuǎn)速大波動下的軸承故障診斷上同樣具有快速收斂和準(zhǔn)確分類的優(yōu)越性能。
3.3交叉驗(yàn)證試驗(yàn)
為進(jìn)一步驗(yàn)證提出方法的有效性,對上述兩節(jié)試驗(yàn)進(jìn)行兩組交叉驗(yàn)證,具體如下:
(1)驗(yàn)證試驗(yàn)1:以勻加減速波動試驗(yàn)數(shù)據(jù)為訓(xùn)練數(shù)據(jù),以無規(guī)律轉(zhuǎn)速波動試驗(yàn)數(shù)據(jù)為測試數(shù)據(jù)進(jìn)行試驗(yàn);
(2)驗(yàn)證試驗(yàn)2:以無規(guī)律轉(zhuǎn)速波動試驗(yàn)數(shù)據(jù)為訓(xùn)練數(shù)據(jù),以勻加減速波動試驗(yàn)數(shù)據(jù)為測試數(shù)據(jù)進(jìn)行試驗(yàn)。
同樣進(jìn)行15次試驗(yàn),訓(xùn)練準(zhǔn)確率在上述兩節(jié)中均已展示,現(xiàn)得到測試準(zhǔn)確率如圖16所示。兩組驗(yàn)證試驗(yàn)的平均準(zhǔn)確率分別為99.91%和98.02%,可以看出以勻加減速波動試驗(yàn)數(shù)據(jù)為訓(xùn)練數(shù)據(jù),以無規(guī)律轉(zhuǎn)速波動試驗(yàn)數(shù)據(jù)為測試數(shù)據(jù)得到的準(zhǔn)確率更高。究其原因應(yīng)為驗(yàn)證試驗(yàn)2中信號的轉(zhuǎn)速波動范圍較小,即缺少600-800r/min的訓(xùn)練數(shù)據(jù),因此在應(yīng)對驗(yàn)證試驗(yàn)1的低轉(zhuǎn)速樣本時準(zhǔn)確率自然降低。由于訓(xùn)練過程與上兩節(jié)試驗(yàn)一致,故訓(xùn)練誤差曲線也無差別,在此不予展示。
兩種驗(yàn)證試驗(yàn)的特征降維散點(diǎn)圖如圖17,18所示,驗(yàn)證試驗(yàn)1的所有故障類型都完美地區(qū)分開來,驗(yàn)證試驗(yàn)2中復(fù)合故障與滾珠故障有輕微重疊現(xiàn)象,且有兩個復(fù)合故障樣本錯誤分人了內(nèi)圈故障中,這也與其得到的相對較低的準(zhǔn)確率相匹配。因此,通過驗(yàn)證對比可以得出,提出方法在交叉驗(yàn)證試驗(yàn)中仍然能獲得較高的準(zhǔn)確率,實(shí)現(xiàn)了故障類型的正確分類和識別。
4結(jié)論
(1)提出的批標(biāo)準(zhǔn)化深度神經(jīng)網(wǎng)絡(luò)方法能夠克服機(jī)械轉(zhuǎn)速大波動的干擾,實(shí)現(xiàn)不同健康狀況軸承的準(zhǔn)確診斷。兩組特殊設(shè)計(jì)的轉(zhuǎn)速大波動軸承試驗(yàn)完美地驗(yàn)證了提出方法的有效性。
(2)頻域信號不僅能克服時域信號的頻移和幅度問題,且數(shù)據(jù)量比時域信號減少一半,在提供更有效信息的同時減少網(wǎng)絡(luò)計(jì)算成本。試驗(yàn)結(jié)果也表明頻域信號能夠獲得比時域信號更高的測試診斷準(zhǔn)確率。
(3)批標(biāo)準(zhǔn)化技術(shù)在克服轉(zhuǎn)速大波動下振動信號的頻移和幅變問題的同時,還能加快網(wǎng)絡(luò)收斂。對比未加批標(biāo)準(zhǔn)化的深度神經(jīng)網(wǎng)絡(luò),結(jié)果顯示批標(biāo)準(zhǔn)化的深度神經(jīng)網(wǎng)絡(luò)能夠更加快速準(zhǔn)確地實(shí)現(xiàn)轉(zhuǎn)速大波動下的軸承故障診斷。
猜你喜歡
裝備制造技術(shù)(2020年3期)2020-12-25 05:22:30
江蘇教育·中學(xué)教學(xué)版(2016年11期)2016-12-21 11:36:29
現(xiàn)代情報(bào)(2016年10期)2016-12-15 11:50:53
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
北京航空航天大學(xué)學(xué)報(bào)(2016年6期)2016-11-16 01:50:43
軟件導(dǎo)刊(2016年9期)2016-11-07 22:20:49
軟件工程(2016年8期)2016-10-25 15:47:34
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21