基于大數(shù)據(jù)技術的純電動汽車減速器速比優(yōu)化研究
2020-05-15 03:54:47張洪雷方運舟龔春忠張永
汽車科技 2020年2期
關鍵詞:大數(shù)據(jù)
張洪雷 方運舟 龔春忠張永
摘要:針對電動汽車減速器速比匹配問題,本文提出一種基于大數(shù)據(jù)技術的優(yōu)化理論,基于MATLAB建模方法對電動汽車速比進行優(yōu)化設計,獲得更接近實際最優(yōu)狀態(tài)的減速器速比。該方法可應用于未來汽車的定制化服務中,達成降低能耗、提升續(xù)航的目標。實例分析中,使用大數(shù)據(jù)技術的速比優(yōu)化相對于使用基于模型的速比優(yōu)化的情況,電驅動系統(tǒng)效率提高1.34%,百公里能量消耗率降低0.174kwh/100km。
關鍵詞:減速器速比優(yōu)化;大數(shù)據(jù);汽車工況;汽車能量消耗率
中圖分類號:U462.3+4 文獻標識碼:J 文章編號:1005-2550(2020)02-0010-05
張洪雷
華中科技大學碩士,高級工程師,浙江合眾新能源汽車有限公司汽車工程研究院常務副院長,主要從事汽車系統(tǒng)設計與開發(fā)。
引言
隨著互聯(lián)網(wǎng)技術的發(fā)展,汽車逐漸進入電動化、智能化、網(wǎng)聯(lián)化、共享化的“新四化”階段。汽車的整車設計、結構、開發(fā)過程也發(fā)生了相應的微調。并行開發(fā)、定制化產(chǎn)品逐漸成為主流。
傳統(tǒng)的汽車速比匹配,至少需要執(zhí)行以下工作:首先,通過車輛的滑行試驗或者仿真數(shù)據(jù)獲取車輛的道路阻力系數(shù);其次,通過當?shù)氐臉藴蚀_定所選擇的工況,中國地區(qū)當前使用NEDC(New Europe Driving Cycle)工況,正準備推CLTC(China Tjght Vehicle Test Procedure)工況,歐洲地區(qū)當前使用WLTC(World Light VehicleTest Procedure)工況;接著,通過電機效率試驗或仿真獲得效率MAP;最后是仿真不同速比進行尋優(yōu)工作。然而該方法過程過多,每一個環(huán)節(jié)都會有誤差引入,導致結果與實際情況相差較大,且工況中不能反應坡道情況、駕駛員操作習慣等信息。
當前,智能網(wǎng)聯(lián)技術迅速發(fā)展,通過大數(shù)據(jù)技術獲取車輛的狀態(tài)信息已變得簡單易行。利用大數(shù)據(jù)挖掘技術,反饋給汽車設計開發(fā)者以完成車輛的優(yōu)化設計是汽車發(fā)展的必然趨勢。本文通過大數(shù)據(jù)采集技術獲取車輛的動力系統(tǒng)數(shù)據(jù),依此進行減速器速比優(yōu)化。
1各類減速器速比優(yōu)化流程
減速器速比優(yōu)化是動力系統(tǒng)匹配設計的關鍵工作之一,通常使用車輛動力性模型進行優(yōu)化設計。根據(jù)模型輸入數(shù)據(jù)的不同,分為設計模型數(shù)據(jù)和試驗數(shù)據(jù)。在實車做出來之前,通常只能用設計模型數(shù)據(jù)進行建模。在模型車做出來之后,可以將模型中的部分數(shù)據(jù)替換為試驗數(shù)據(jù),以令結果更接近實際情況。
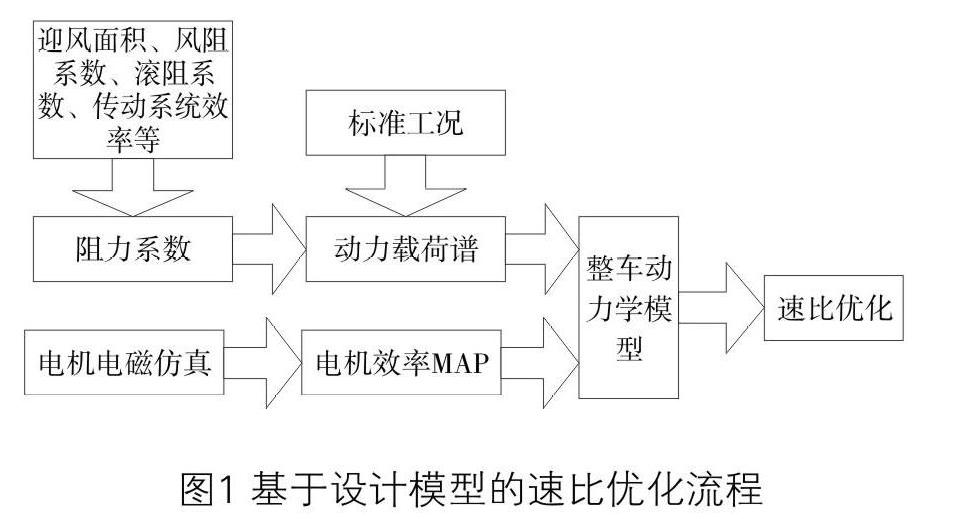
1.1基于設計模型的減速器速比優(yōu)化流程
汽車動力性系統(tǒng)的建模有多種工具,例如ADVISOR、AVL CRUISE等。或者基于MATLAB等工具建立數(shù)學模型。數(shù)學建模需要輸入迎風面積、風阻系數(shù)、車輪滾阻系數(shù)、整車重量、傳動系統(tǒng)效率等信息;電機MAP的獲取,通常使用電機的電磁仿真數(shù)據(jù)獲取;道路的載荷則通過選定工況和模型仿真的阻力系數(shù)確定。最終所有的數(shù)據(jù)進入整車動力學模型中仿真確定最優(yōu)速比。如圖1所示:
1.2基于試驗數(shù)據(jù)的減速器速比優(yōu)化方案
模型中假設的數(shù)據(jù)越多,模型的可信度越差。因為假設誤差會通過模型精度影響進一步放大。為提高精度,需要使用部分模型數(shù)據(jù)由試驗數(shù)據(jù)替代。對于速比匹配的工作,通常在樣車階段或選擇近似競品車型進行滑行試驗,獲得道路阻力系數(shù)。并通過電機臺架試驗,獲得電機效率MAP特性。這兩種數(shù)據(jù)再導入到整車動力學模型中進行速比優(yōu)化。流程如圖2所示:
基于試驗數(shù)據(jù)的減速器速比優(yōu)化方案依然有兩個缺點,一是工況為標準工況,不能反映每個用戶實際用車情況,標準工況中考慮不到不同地域坡道因素,也考慮不到每個駕駛人員是否習慣急加速急減速的駕駛習慣;二是需要多個試驗測試,電機效率MAP未能考慮電池輸出電壓變化的情況,數(shù)據(jù)綜合導入模型中,相對于完全使用設計模型的仿真環(huán)節(jié)減少,但依然有改善的空間。
1.3基于大數(shù)據(jù)技術的減速器速比優(yōu)化方案
本文提出選擇基于大數(shù)據(jù)技術,采集實路狀態(tài)下的車輛動力系統(tǒng)信息,將駕駛員、實際道路載荷直接反映為電機輸入端的轉速扭力,并采集電池輸出到電機輸入端的電壓電流。流程如圖3所示:
圖3中的動力載荷譜與電機效率MAP相對于前兩個方案,減少了更多的假設環(huán)節(jié),直接實測獲得,其優(yōu)點是能反映實際測量的工作狀態(tài),以便可以更好地執(zhí)行速比優(yōu)化工作。但要求車輛需要配置上精確的轉速、扭力、電壓、電流傳感器,同時允許使用大數(shù)據(jù)技術將這些信息上傳。
2基于大數(shù)據(jù)技術的減速器速比優(yōu)化過程
應用大數(shù)據(jù)技術的前提是獲取有效可靠的數(shù)據(jù)。為此,需要先制造一輛安裝有高精度轉速、扭力、電壓、電流傳感器的樣車。該樣車有一個初選的減速器速比。將該樣車制造出來以后,要去常用的路況上行駛,獲得動力系統(tǒng)秒采數(shù)據(jù)。
2.1樣車制造及采集數(shù)據(jù)
對于使用永磁同步電機的純電動汽車,轉速通常使用旋轉變壓器形式測量轉速,單體電壓精度通常在±3mV以內,整包電壓精度在±0.3v以內,電流精度在±1%以內。而扭矩通常使用計算方法通過MCU發(fā)出,精度相對較低。作為數(shù)據(jù)采集的樣車,可以適當提高電流精度。
樣車中的速比,可以選擇根據(jù)NEDC或WLTC工況優(yōu)化的初始速比。
2.2速比優(yōu)化建模
將汽車在常用路況上行駛,采集行駛過程中的MCU輸入電壓U、MCU輸入電流I、電機輸出轉速n,電機輸出扭矩T。這4個量非常重要,在能流中如圖4所示:
圖中電流為正是表示驅動狀態(tài),電流為負時表示能量回收狀態(tài),扭力為正時表示驅動狀態(tài),扭力為負時表示能量回收狀態(tài)。
該電機MAP相對于試驗中的MAP,相當于考慮了電壓、溫度等綜合因素。但其缺點是集中在某個區(qū)域,而電機效率MAP試驗時,可以測量電機的全區(qū)域。因此,基于大數(shù)據(jù)的處理方法也可以使用MAP替代,表達式與(4)相同。此時僅需獲取開車時的轉速與扭力信息。
速比優(yōu)化工作最重要的是構建不同速比與電驅動綜合效率的關系,設i0為樣車基礎速比,i為優(yōu)化速比變量,則iX與綜合效率ηx關系如式(5)所示:
通常,減速器速比在5~15之間。速比優(yōu)化模型為max(ηx),求對應的ix。
3優(yōu)化實例
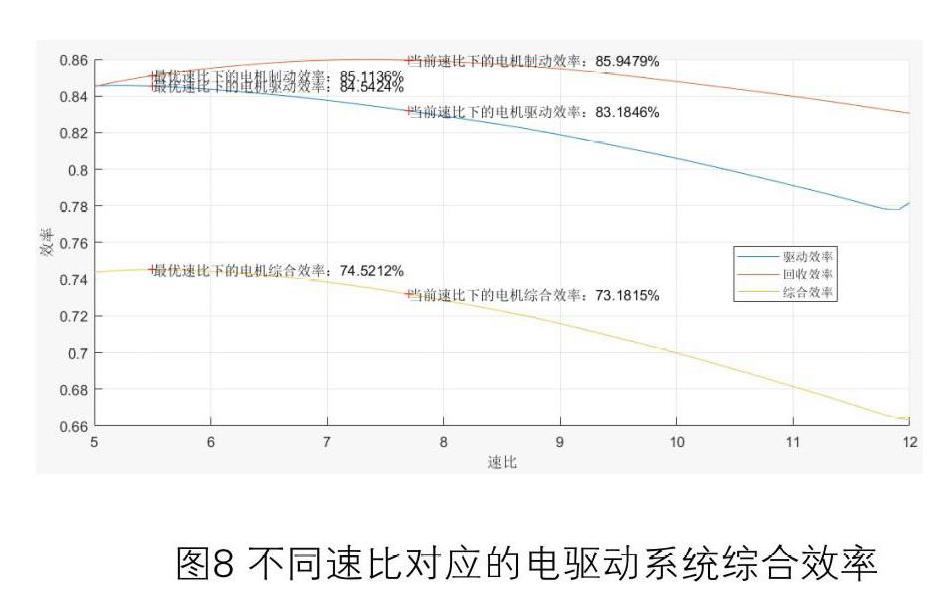
使用浙江合眾新能源汽車有限公司的哪吒N01車型作為樣車對象,該車減速器速比io=7.7,在桐鄉(xiāng)市二環(huán)路實路開車進行數(shù)據(jù)收集。如圖5所示。采集到的電壓、電流、轉速、扭力信息如圖6所示。按照(4)式構建MAP點云,如圖7所示。按照(5)式模型優(yōu)化速比。因為是單變量優(yōu)化,范圍也不寬,所以可以選擇繪制不同速比與系統(tǒng)綜合效率的關系,如圖8所示:
圖8不同速比對應的電驅動系統(tǒng)綜合效率
由此可知,動力系統(tǒng)若選擇速比ix=5.5,則效率將提升1.34%,整車能耗將降低0.174kWh/100km。
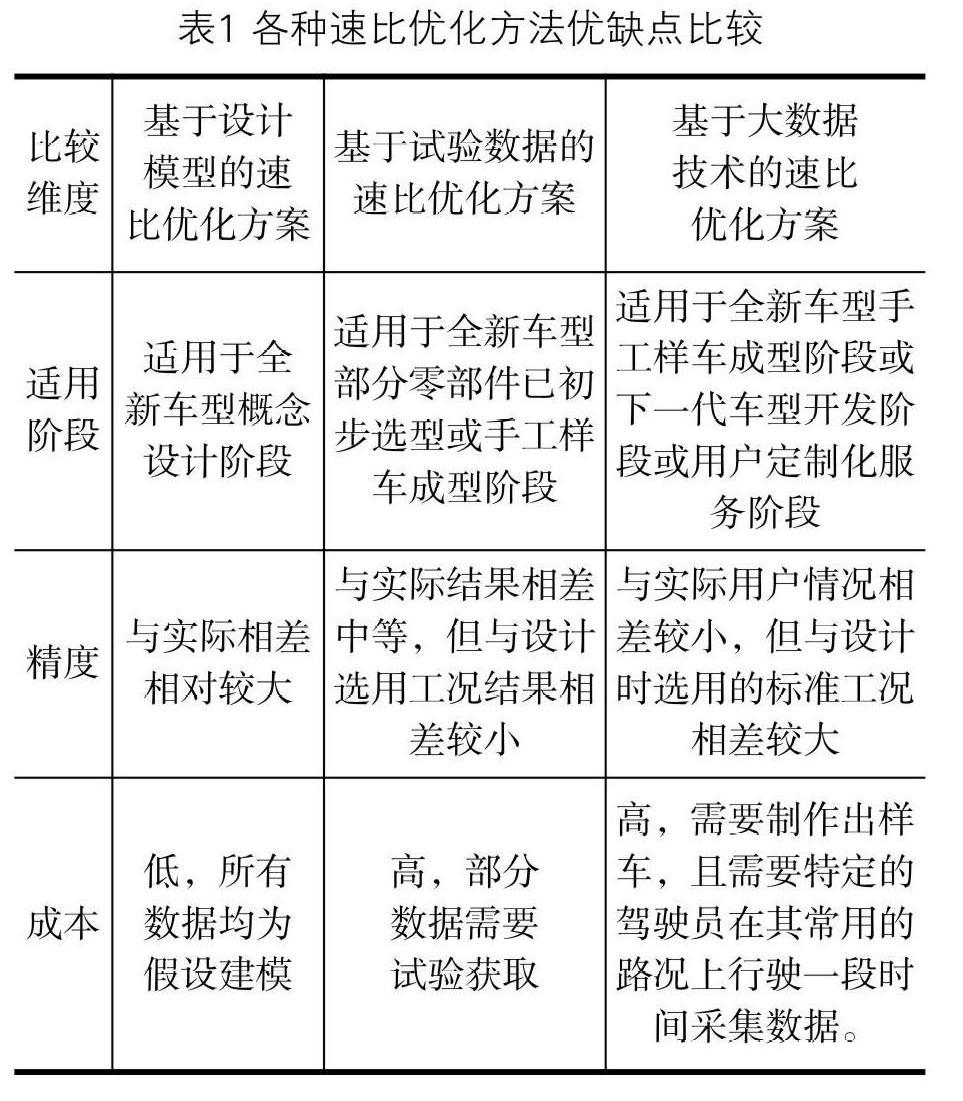
4各方案優(yōu)缺點及互補分析
使用基于大數(shù)據(jù)的速比優(yōu)化方案自身也存在優(yōu)缺點,不能完全替代現(xiàn)有速比優(yōu)化方法。需要對不同的應用場景進行分析,從適用階段、精度、成本三個維度進行優(yōu)缺點比較,如表1所示:
5結論
本文提出采用基于大數(shù)據(jù)采集進行電動汽車減速器速比優(yōu)化的方法。通過對具體用戶的實際工況電機端阻力采集分析,運用MATLAB建模,仿真設計最優(yōu)速比。并對當前基于模型的速比設計、基于試驗數(shù)據(jù)的速比設計方案進行了比較分析,該方法對實際工況的降能耗具有積極的意義。為車輛具體應用場景及降能耗提供定制化解決方案。
下一步工作中,將研究基于特定用戶或用戶群體的大數(shù)據(jù)收集分析,做動力性需求與經(jīng)濟性優(yōu)化的綜合優(yōu)化設計,并研究雙減速器速比的變速箱在純電動汽車上應用的必要性。
猜你喜歡
中國市場(2016年36期)2016-10-19 04:41:16
中國市場(2016年36期)2016-10-19 03:31:48
中國市場(2016年35期)2016-10-19 01:30:59
商(2016年27期)2016-10-17 06:26:00
今傳媒(2016年9期)2016-10-15 23:35:12
今傳媒(2016年9期)2016-10-15 22:09:11
新聞世界(2016年10期)2016-10-11 20:13:53
科技視界(2016年20期)2016-09-29 10:53:22
中國記者(2016年6期)2016-08-26 12:36:20
