PMSM驅動的柔性關節機器人命令濾波模糊控制
2020-05-20 15:05:18王博于金鵬于海生
青島大學學報(工程技術版) 2020年2期
關鍵詞:永磁同步電機
王博 于金鵬 于海生

摘要:針對永磁同步電機驅動的柔性關節機器人的位置跟蹤控制問題,本文采用反步法進行控制,并基于永磁同步電機和柔性關節機器人構建的新系統,通過永磁同步電機的電壓,實現機器人的位置跟蹤。同時,結合模糊自適應控制方法,利用命令濾波技術,解決了傳統反步法中存在的“計算復雜性”問題。為驗證本文控制算法的有效性,利用Matlab進行仿真實驗。實驗結果表明,機器人的位置信號可以快速跟蹤給定的期望信號,且跟蹤誤差小,跟蹤效果良好,控制精度高,說明本文所設計的控制方法,對永磁同步電機驅動的柔性關節機器人系統具有良好的控制效果。該研究能夠有效實現對柔性關節機器人的位置跟蹤控制,具有較好的應用前景。
關鍵詞:模糊自適應控制; 命令濾波反步控制; 柔性關節機器人; 永磁同步電機
中圖分類號: TP242.2; TP273+.4; TM341文獻標識碼: A
文章編號: 1006-9798(2020)02-0083-08; DOI: 10.13306/j.1006-9798.2020.02.013
目前,機器人控制在國內外引起了越來越多的關注。機器人在各個領域發展迅速,在搶災救險、娛樂及軍事等許多方面都具有非常好的應用前景[1-3]。其中,柔性關節機器人(flexible joint robot,FJR)因為具有高負載、質量輕,低功耗等特點被廣泛應用,對其控制方法的研究成為焦點問題。以往針對FJR的控制方法[4-6]大多只考慮其本身的動力學模型,通過控制驅動電機的輸出力矩,實現機器人的位置跟蹤,忽略了其驅動電機的控制問題,導致工程實踐中控制效果不佳。為了提高FJR系統的控制效果,應同時考慮其驅動電機系統的控制穩定性。近年來,隨著電機相關理論及控制技術日趨成熟,永磁同步電機(permanent magnet synchronous motor,PMSM)以其功率因數高、結構簡單、使用周期長及維護簡單等優點取得越來越廣泛的應用[7],PMSM的自身特性滿足FJR驅動控制的需要,因此PMSM可以被用作FJR的驅動電機。FJR系統與PMSM系統都是非線性系統,具有強耦合、高階次等特性,其控制器設計過程十分復雜。針對此類系統,學者們提出了反步控制[8-9]、奇異攝動控制[10-11]和滑模控制[12-13]等控制方法。趙丹青[14]使用反步法對FJR進行控制,但傳統反步法在應用過程中仍然存在無法處理系統中未知的非線性函數項及虛擬控制信號重復求導引起的“計算復雜性”問題這兩個缺點,限制了傳統反步法應用的范圍。為了克服傳統反步法中的第1個缺點,于金鵬等人[15]提出了一種基于模糊邏輯系統(fuzzy logic system,FLS)逼近的自適應反步法,來處理非線性系統中存在未知非線性函數的問題;針對第2個缺點,Tong S C等人[16]將模糊自適應反步技術與動態面技術相結合,引入一階濾波器,解決了“計算復雜性”問題,然而在應用過程中濾波器會產生濾波誤差,導致系統的控制精度下降。為了解決上述問題,可在高階非線性系統控制中引入命令濾波技術,克服了動態面技術的缺陷,對濾波器產生的濾波誤差進行補償,控制效果更加理想[17]。基于此,本文提出了一種基于PMSM驅動FJR的命令濾波模糊自適應反步控制方法,并采用Matlab進行仿真實驗。仿真結果證明本文提出的控制方法,對永磁同步電機驅動的柔性關節機器人系統具有良好的控制效果。
1PMSM驅動的FJR的數學模型
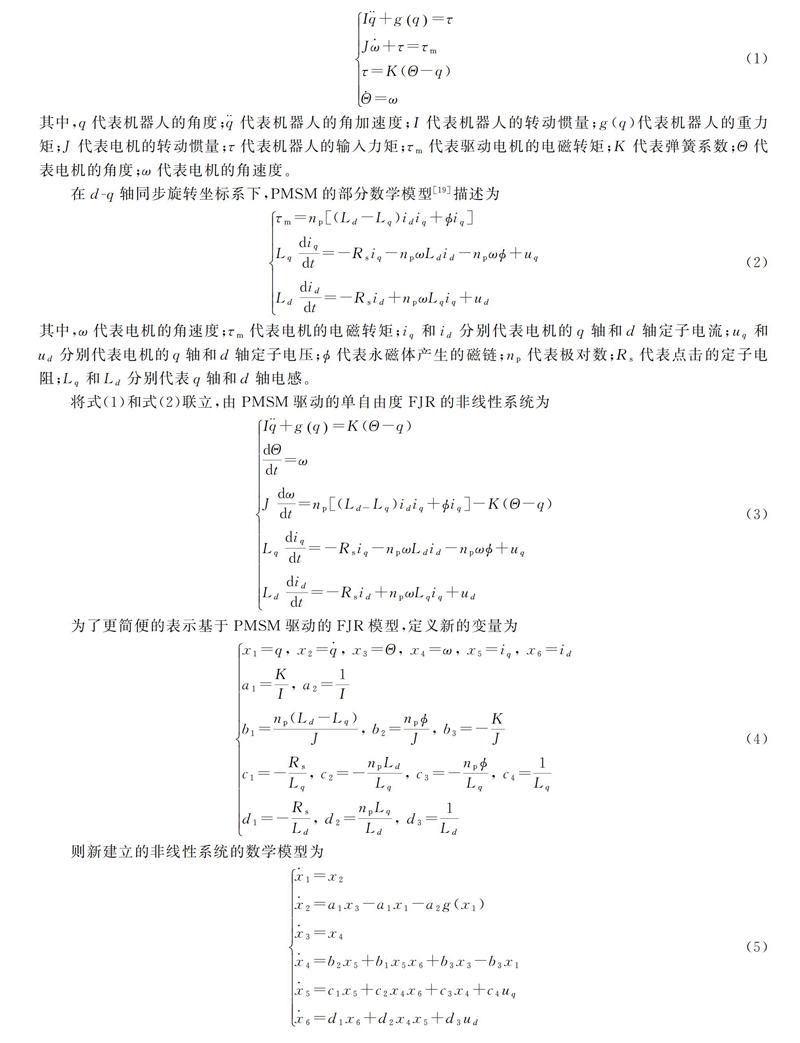
單自由度FJR的動力學模型[18]為
其中,q代表機器人的角度;代表機器人的角加速度;I代表機器人的轉動慣量;g(q)代表機器人的重力矩;J代表電機的轉動慣量;τ代表機器人的輸入力矩;τm代表驅動電機的電磁轉矩;K代表彈簧系數;Θ代表電機的角度;ω代表電機的角速度。
在d-q軸同步旋轉坐標系下,PMSM的部分數學模型[19]描述為
其中,ω代表電機的角速度;τm代表電機的電磁轉矩;iq和id分別代表電機的q軸和d軸定子電流;uq和ud分別代表電機的q軸和d軸定子電壓;代表永磁體產生的磁鏈;np代表極對數;Rs代表點擊的定子電阻;Lq和Ld分別代表q軸和d軸電感。
將式(1)和式(2)聯立,由PMSM驅動的單自由度FJR的非線性系統為
為了更簡便的表示基于PMSM驅動的FJR模型,定義新的變量為
則新建立的非線性系統的數學模型為
系統的控制目標為設計控制器的輸入uq和ud,使輸出信號x1能跟蹤期望信號xd。
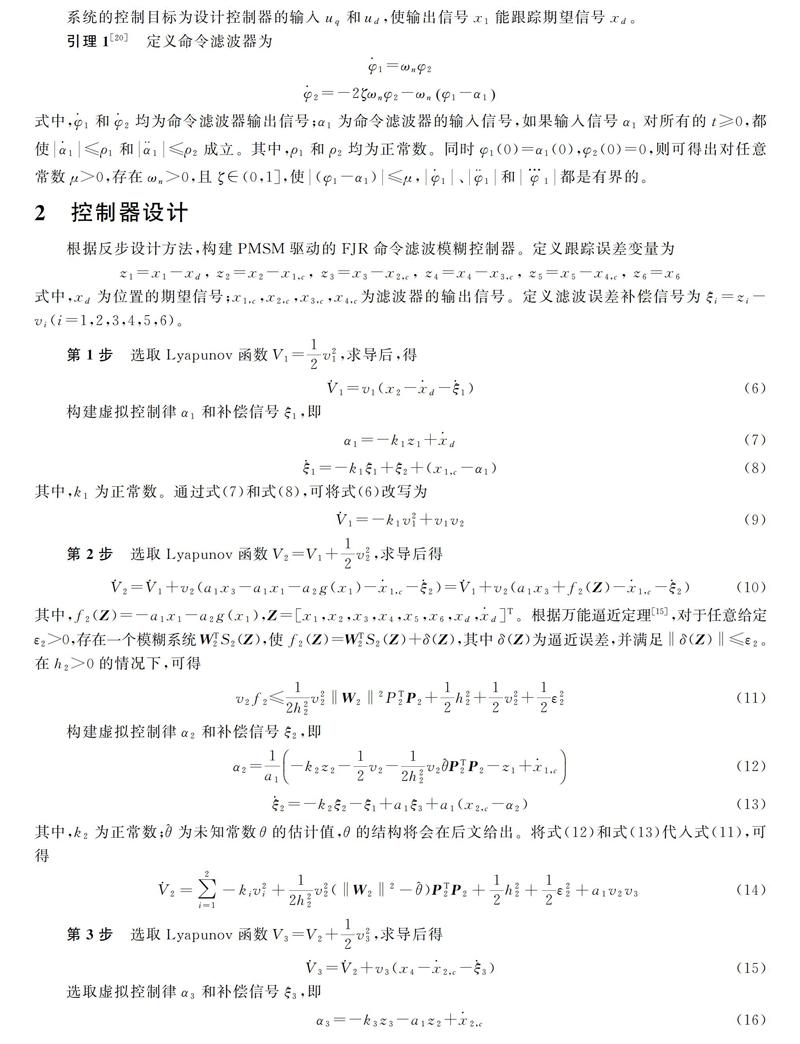
引理1[20]定義命令濾波器為
式中,1和2均為命令濾波器輸出信號;α1為命令濾波器的輸入信號,如果輸入信號α1對所有的t≥0,都使1≤ρ1和1≤ρ2成立。其中,ρ1和ρ2均為正常數。同時φ1(0)=α1(0),φ2(0)=0,則可得出對任意常數μ>0,存在ωn>0,且ζ∈(0,1],使(φ1-α1)≤μ,1、1和φ···1都是有界的。
2控制器設計
根據反步設計方法,構建PMSM驅動的FJR命令濾波模糊控制器。定義跟蹤誤差變量為
式中,xd為位置的期望信號;x1,c,x2,c,x3,c,x4,c為濾波器的輸出信號。定義濾波誤差補償信號為ξi=zi-vi(i=1,2,3,4,5,6)。
第1步選取Lyapunov函數V1=12v21,求導后,得
構建虛擬控制律α1和補償信號ξ1,即
其中,k1為正常數。通過式(7)和式(8),可將式(6)改寫為
第2步選取Lyapunov函數V2=V1+12v22,求導后得
其中,f2(Z)=-a1x1-a2g(x1),Z=[x1,x2,x3,x4,x5,x6,xd,d]T。根據萬能逼近定理[15],對于任意給定ε2>0,存在一個模糊系統WT2S2(Z),使f2(Z)=WT2S2(Z)+δ(Z),其中δ(Z)為逼近誤差,并滿足‖δ(Z)‖≤ε2。在h2>0的情況下,可得
構建虛擬控制律α2和補償信號ξ2,即
其中,k2為正常數;為未知常數θ的估計值,θ的結構將會在后文給出。將式(12)和式(13)代入式(11),可得
第3步選取Lyapunov函數V3=V2+12v23,求導后得
選取虛擬控制律α3和補償信號ξ3,即
將式(16)和式(17)代入式(15),有
第4步選取Lyapunov函數V4=V3+12v24,求導后得
其中,f4(Z)=b1x5x6-b3x3+b3x1。同理,運用模糊邏輯系統逼近此非線性函數,對于任意給定的ε4>0,在h4>0的情況下,可得
選取虛擬控制律α4和補償信號ξ4,即
將式(21)和式(22)代入式(20),可得
第5步構建Lyapunov函數V5=V4+12v25,求導后得
其中,f5(Z)=c1x5+c2x4x6+c3x4,任意給定的ε5>0,在h5>0的情況下,可得
選取真實控制律uq和補償信號ξ5,即
將式(26)和式(27)代入式(25),有
第6步構建Lyapunov函數V6=V5+12v26,求導后得
其中,f6(Z)=d1x6+d2x4x5,對于任意給定的ε6>0,在h6>0的情況下,可得
選取真實控制律ud和補償信號ξ6,即
將式(31)和式(32)代入式(30),得
設計θ=max‖W2‖2,‖W4‖2,‖W5‖2,‖W6‖2。其中,是θ的估計值。定義估計誤差為
=θ-(34)
為了證明系統的穩定性,構建Lyapunov函數為
求導后得
選取自適應律為
3穩定性分析
將式(37)代入式(36),可得
由楊氏不等式可知
則式(38)可轉化為
其中,a=min{2k1,2k2,2k3,2k4,2k5,2k6,m1};b=12ε22+12h22+∑6i=412h2i+12ε2i+m12r1θ2。
由式(40)可得
式(41)表明,vi(i=1,2,3,4,5,6)屬于緊集Ω={(vi,)V≤V(t0)+a/b,t≥t0},故閉環系統中的所有信號都是有界的,則limt→∞vi≤2b/a,其中i=1,2,3,4,5,6。
由于zi=vi+ξi,要想證明誤差zi是有界的,必須證明命令濾波中的補償信號ξi是有界的。
選取Lyapunov函數為
求導后得
其中,i=1,2,3,4,5,6。
由上述證明可知,vi和ξi都是有界的,則跟蹤誤差zi是有界的,即
其中,i=1,2,3,4,5,6。
當選定參數ki和m1后,選取足夠大的r1和足夠小的μ,hi和εi,可以保證系統的跟蹤誤差足夠小。
4仿真結果分析
為驗證本文的控制算法對PMSM驅動的FJR系統的有效性,利用Matlab進行仿真實驗。其中,機器人的轉動慣量為I=0.2 kg·m2,機器人的質量m=1 kg,重力加速度為g=9.8 m/s2,起始時刻q=0,機器人的重力矩為g(q)=-mgsin(q),彈簧系數K=10 000。
PMSM的參數:J=0.003 79 kg·m2,Rs=0.68 Ω,np=3,Ld=0.003 15 H,Lq=0.002 85 H,=0.124 5 Wb。
控制器的參數:k1=800,k2=200,k3=1,k4=500,k5=100,m1=0.5,r1=0.07,h2=h4=h5=h6=100。
命令濾波器的參數:ζ=0.7,ωn=3 000;期望的跟蹤信號:xd=sin(t);選擇模糊集如下:
μF1i=exp-(x+5)22, μF2i=exp-(x+4)22, μF3i=exp-(x+3)22, μF4i=exp-(x+2)22
μF5i=exp-(x+1)22, μF6i=exp-(x-0)22, μF7i=exp-(x-1)22, μF8i=exp-(x-2)22
μF9i=exp-(x-3)22, μF10i=exp-(x-4)22, μF11i=exp-(x-5)22
x1和xd的波形對比如圖1所示,跟蹤誤差z1的波形如圖2所示,q軸電壓隨時間變化曲線如圖3所示,d軸電壓隨時間變化曲線如圖4所示。
由圖1~圖4可以看出,本文設計的控制方法中,機器人的位置信號可以快速跟蹤給定的期望信號,并且跟蹤誤差小,跟蹤效果良好,響應速度快,控制精度高。
5結束語
本文針對PMSM驅動的FJR系統,將FJR的動力學模型與PMSM的數學模型相結合,建立新的非線性系統。同時,采用命令濾波技術,結合模糊自適應反步控制方法,通過PMSM的輸入電壓,實現了對FJR的位置控制。同時,利用模糊自適應技術處理了新系統中的不確定非線性函數,將命令濾波技術與反步法結合應用于新系統中,解決了傳統反步法中存在的“計算復雜性問題”;引入濾波誤差補償機制,對濾波器產生的誤差進行補償,降低濾波誤差在控制過程中造成的影響。仿真結果表明,本文提出的控制方法能夠有效的實現對FJR的位置跟蹤控制。
參考文獻:
[1]胡亞強, 于金鵬, 趙林, 等. 基于命令濾波技術的水下機器人位置跟蹤控制[J]. 青島大學學報: 工程技術版, 2019, 34(1): 99-104.
[2]劉自文, 趙亮, 于鵬, 等. 柔性外骨骼手的抓取力控制方法[J]. 機器人, 2019, 41(4): 483-492.
[3]鄒明峻, 于金鵬, 于海生, 等. 全肘式四足仿生機器人爬臺階步態研究[J]. 電氣傳動, 2019, 49(11): 64-69.
[4]何棟煒, 周結華, 高培, 等. 機器人自適應非光滑軌跡跟蹤控制[J]. 控制工程, 2018, 25(9): 1666-1670.
[5]Haouari F, Nourdine B, Boucherit M S, et al. A Coefficient diagram method controller with backstepping methodology for robotic manipulators[J]. Journal of Electrical Engineering, 2015, 66(5): 270-276.
[6]陳志勇, 李振漢. 柔性基和柔性關節空間機器人雙重自適應控制[J]. 華中科技大學學報: 自然科學版, 2019, 47(1): 32-38.
[7]劉加勛, 王佐勛, 雷騰飛, 等. 永磁同步電機有限時間混沌同步控制[J]. 微特電機, 2019, 47(8): 45-47.
[8]Yu J P, Shi P, Dong W J, et al. Observer and command filter-based adaptive fuzzy output feedback control of uncertain nonlinear systems[J]. IEEE Transactions on Industrial Electronics, 2015, 62(9): 5962-5970.
[9]王雪竹, 李洪誼, 王越超, 等. 柔性關節機器人高精度自適應反步法控制[J]. 信息與控制, 2016, 45(1): 1-7.
[10]劉華山, 金元林, 程新, 等. 力矩輸入有界的FJR軌跡跟蹤控制[J]. 控制理論與應用, 2019, 36(6): 983-992.
[11]劉福才, 劉林, 徐智穎. 柔性關節空間機械臂奇異攝動模糊PID控制仿真研究[J]. 高技術通訊, 2019, 29(7): 661-667.
[12]趙春剛, 張愛華, 王明紅, 等. 多關節機器人事件驅動神經網絡滑模控制[J]. 制造業自動化, 2018, 40(8): 135-139.
[13]莊未, 劉曉平. 多連桿柔性關節機械臂的神經滑模控制[J]. 系統仿真學報, 2011, 23(10): 2098-2102.
[14]趙丹青. 機器人的柔性關節機械手控制研究[J]. 計算機仿真, 2011, 28(2): 244-247.
[15]于金鵬, 陳兵, 于海生, 等. 基于模糊自適應反步法的永磁同步電機位置跟蹤控制[J]. 控制與決策, 2010, 25(10): 1547-1551.
[16]Tong S C, Sui S, Li Y M. Fuzzy adaptive output feedback control of MIMO nonlinear systems with partial tracking errors constrained[J]. IEEE Transactions on Fuzzy Systems, 2015, 23(4): 729-742.
[17]于金鵬, 于海生, 林崇. 考慮鐵損的異步電動機模糊自適應命令濾波反步控制[J]. 控制與決策, 2016, 31(12): 2189-2194.
[18]Huang Y, Ran C, Li J, et al. Integrated rotary compliant joint and its impedance-based controller for single-joint pressing massage robot[C]∥2012 IEEE International Conference on Robotics and Biomimetics (ROBIO). Guangzhou, China: IEEE, 2012: 1962-1967.
[19]楊雪婷, 馬玉梅, 于金鵬, 等. 基于有限時間永磁同步電機命令濾波位置跟蹤控制[J]. 青島大學學報: 工程技術版, 2017, 32(3): 104-108, 113.
[20]程帥, 于金鵬, 于海生, 等. 考慮鐵損的永磁同步電機隨機命令濾波控制[J]. 微電機, 2019, 52(7): 61-66.
Command Filtered Fuzzy Control for Flexible Joint Robot Driven by Permanent Magnet Synchronous Motor
WANG Bo, YU Jinpeng, YU Haisheng
(School of Automation, Qingdao University, Qingdao 266071, China)
Abstract:Aiming at the position tracking control of the flexible joint robot driven by permanent magnet synchronous motor, this paper adopts the backstepping and realizes the position tracking of the robot through the voltage of the permanent magnet synchronous motor based on the new system constructed by permanent magnet synchronous motor and flexible joint robot. At the same time, the problem of "computational complexity" in the traditional backstepping is solved by the command filtering technology combined with the adaptive fuzzy control method. The simulation experiment is carried out in Matlab to verify the effectiveness of the control algorithm in this paper. The experimental results show that the position signal of the robot can accurately track the desired signal. The method proposed in this paper has the advantages of small error, great tracking effect and excellent control accuracy. It shows that under the control method designed in this paper, the flexible joint robot system driven by PMSM has great control effect. The research can effectively realize the position tracking control of the flexible joint robot and has a good application prospect.
Key words:adaptive fuzzy control; command filtered backstepping control; flexible joint robot; permanent magnet synchronous motor
收稿日期: 2019-12-20; 修回日期: 2020-02-03
基金項目:? 國家重點研發計劃(2017YFB1303503);國家自然基金資助項目(61573204);泰山學者工程專項經費資助(TSQN20161026)
作者簡介: 王博(1994- ),男,山東煙臺人,碩士研究生,主要研究方向為機器人與電機控制。
通信作者: 于金鵬(1978- ),男,山東乳山人,教授,博士生導師,泰山學者,主要研究方向為電能變換與電機系統控制。 Email: yjp1109@126.com
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49