壓縮式垃圾車壓填循環動作的智能化改進
2020-05-22 10:57:16林亮
專用汽車 2020年5期
林亮
福建龍馬環衛裝備股份有限公司 福建龍巖 364000
1 前言
隨著城鎮化建設加速推進,城市規模不斷擴大,城市人口不斷增加,隨之而來的是生活垃圾的不斷增加。壓縮式垃圾車因其可將垃圾進行預壓縮、裝載量大,且垃圾箱密封,不會造成運輸過程的二次污染等優點而被越來越多的環衛部門所選用。但是由于我國各地居民生活習慣等不同會造成垃圾車在裝載時可能會碰到各種各樣的垃圾,當單次垃圾的倒入量較多時,而有些垃圾的質地較硬甚至可能有不合要求的垃圾(建筑垃圾等)倒入填料器中,可能會使現有的壓填循環動作出現停滯等異常情況,如果系統長時間處于大壓力狀態就可能會增加系統的故障率,降低設備的使用壽命。
2 壓縮式垃圾車的裝載工作原理
壓縮式垃圾車通過提升裝置將裝于垃圾筒中的垃圾倒入填料器,其主要的工作過程是通過刮板及滑板的配合動作進行壓填循環,將倒入的垃圾不斷刮入車箱內,直至垃圾裝滿車箱。
3 改進前壓填循環過程
壓填循環過程為:刮板旋起,檢測到旋起到位信號后,滑板開始下行;檢測到下行到位信號后,刮板開始壓下;檢測到壓下到位信號后,滑板開始上行;最后上行檢測到上行到位信號后動作結束,即完成一次的壓填循環。改進前工作流程如圖1所示。
4 壓填循環可能碰到的問題
現在生活垃圾的處理量不斷加大,垃圾桶的容積也越來越大,這樣對垃圾車的裝載能力提出了更高的要求。若單次垃圾量倒入較多或有些垃圾質地較硬甚至有不合要求的垃圾混入其中時,正常的壓填循環動作可能會出現異常,根據收集到的信息,異常情況最多的就是出現動作停滯,長期這種情況則給垃圾的正常壓裝帶來一系列的問題。
由壓填循環的工作原理可知:壓填循環是順序執行的,當接收到觸發信號進入壓填循環后,其每一個階段的動作開始執行時,都是由相應位置的到位信號來結束原動作,同時該到位信號去觸發下一個動作順序執行;所以當一次處理量過多或有硬物卡滯在壓填作業區時,某一動作不能順利地執行下去,其未能接收到相應的到位信號,則該動作將長時間維持,并且下一個動作也不可能會被執行,壓填循環則處于停滯狀態;也因為該動作不夠智能,其無法進行相應處理或及時報警,會造成以下情況:
a. 可能會讓操作人員誤以為設備產生了故障,停止設備運行,停止裝載垃圾,暫停垃圾車的使用,從而影響正常的垃圾收集,這樣就大大地降低了環衛部門的工作效率;
b. 更為嚴重的后果是因為動作停滯但其仍在繼續運行,但是動作不能到位,則系統的壓力將立即增大,增大至系統最大壓力,并且一直處于最大壓力狀態。當系統長時間處于大壓力狀態可能給液壓系統帶來更多的隱患(如閥體漏油,管路漏油,密封損壞等);
c. 同時控制液壓油路工作的電磁閥線圈長時間得電,會造成線圈發熱,這樣會降低線圈的使用壽命,久之容易形成線圈的局部短路,工作電流變大,損壞電氣元件造成電氣故障;
d. 同時因為結構件長時間受力也可能會造成結構的變形等現象。
通過對以上問題的分析可以知道,在發生動作停滯時,其液壓系統的壓力就會隨之加大,并且處于大壓力狀態;而在每個動作(每個階段)的開始及結束都有相應的信號進行控制及進行指示,但是在動作的過程中并沒有加入任何的檢測信號來檢測其動作的狀態,所以才會產生動作的停滯等失控狀態;目前只有通過操作者觀察和憑借經驗判斷壓填循環的動作狀況,但是因為每個操作者的經驗不同,有時并不能夠很好地判斷壓填循環是處于停滯狀態還是處于故障狀態,導致設備長期不正常運行;也可能因為未能及時發現問題而導致設備發生故障。因此需要改進現有的壓填動作,進行智能化處理,以便在發生停滯時,系統能夠自動地進行相應處理來保護設備。
5 改進后的壓填循環工作流程
在壓填循環發生停滯時最明顯的現象除了動作的停滯外,還有一個明顯的現象就是系統壓力的增大。壓縮循環異常情況時壓力情況如圖2所示。
考慮增加對動作壓力的檢測,根據壓力的變化情況對系統作出控制。因此在原有液壓系統的基礎上增加一個壓力傳感器來進行信號反饋,將壓力的設定值設置為某一壓力值(如18 MPa),如在壓填循環某一過程達到設定壓力時,壓力傳感器給控制器一個信號;考慮到壓縮式垃圾車的工作原理,需要對垃圾進行壓縮,需有一定的保壓,因此在正常使用的過程中系統壓力也可能達到設定壓力。
為了排除保壓或其他小阻力情況,在控制器接收到壓力信號時,還將對接收到的壓力信號進行進一步的過濾,即在達到設定壓力后,通過對壓力信號的持續時間進行計時。一般情況下保壓或碰到有點阻力時,其壓力也可能達到設定,但隨著動作的進行,有功壓力持續增大,則會沖破該阻力,之后壓力會減小至設定值以下,所以其壓力持續時長也會比設定檢測時長短,其壓力曲線會呈現短時間尖脈沖形狀;而在異常情況下,雖然有功壓力持續增加,但無法沖破異常阻力,其壓力持續時間則會無限增長,如圖2。
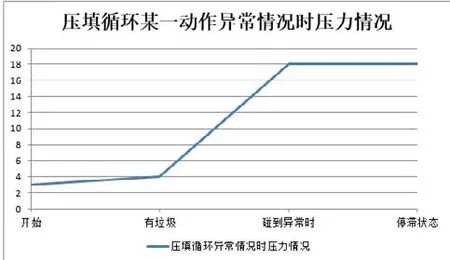
圖2 壓縮循環異常情況時壓力情況
所以當壓力信號持續時間夠長時,可以判斷此時為壓填循環停滯狀態;考慮到系統的保壓及設備的保護,考慮對時間也進行一定的限制,如將壓力信號持續時間超過5 s時認定為“停滯狀態”。當然這一檢測過程需要通過實際多次的調試尋找到適合的保壓時間,壓力設定值及壓力檢測時長,在保護設備的前提下保證動作可靠執行。
當然并不是壓填循環的每一步動作長時間未到位都可以叫停滯狀態。如“刮板旋起”動作其為壓填循環的準備動作,其長時間未到位則表示出現位置傳感器等故障,需要進行檢修,此時應該進行智能報警,提示操作人員。故對壓填循環進行以下改進。
5.1 對不同的動作進行不同的檢測
如“刮板旋起”動作因其無垃圾壓縮過程,所以只進行動作計時以檢測是否出現未到位故障;而循環的其余動作都具有垃圾壓縮的過程,則進行動作過程壓力檢測和壓力計時檢測,以判斷是否出現 “停滯狀態”。
5.2 對不同情況進行不同處理
a.如檢測到“刮板旋起”動作超時時,若其不存在垃圾阻擋等情況,最有可能就是位置傳感器故障,所以直接進行報警以提醒操作人員進行檢修;
b.若循環的其余動作出現動作壓力超時時,因其可能為垃圾過多造成不到位,也可能因位置傳感器故障造成不到位,所以首先對其進行動作返回并重新執行確認,如在規定的次數內動作仍無法到位,則系統停止動作并進行報警以提醒操作人員進行檢修。
同時,系統在程序設計時根據報警所發生的動作不同階段,提供智能報警。比如滑板上行過程中,上行到位傳感器損壞,滑板卡滯在中間不動作,系統檢測到異常,此時報警裝置發出語音報警(如提示:滑板上行動作異常,請確認物料情況或檢查滑板上位傳感器!)或其他通過警示燈不同頻率閃爍等,提醒操作人員進行停車維修。
相對原有動作呆板的順序執行,在動作的過程中加入了壓力和時間監控。首先對動作進行壓力檢測,當動作過程中壓力達到設定壓力時,并持續一定時間動作仍無法到位,且該超時未達到預設次數,則首先停止當前動作并執行動作返回(將刮板旋起,然后再將滑板上行復位);其次進行再循環以確認動作情況,如果循環可以順利的進行,則說明垃圾情況正常,只是單次垃圾量較多而已。但如果在第二次(次數可根據實際情況設定)的循環時還碰到壓力超時的情況,則說明垃圾情況不符合要求,繼續動作可能會對設備產生損壞,這時系統將停止循環,同時進行報警以提示操作者,同時機構也可進行返回動作(刮板旋起,滑板上行)以方便操作者對垃圾的情況進行觀察,排除。
5.3 改進后工作流程
所以結合以上優化,改進后的壓縮循環是:
首先執行刮板旋起動作,如在規定的時間內檢測到旋起到位信號,則進行下一動作,滑板開始下行;如在規定的時間內未檢測到旋起到位信號,則系統停止循環并開始報警。
當滑板開始下行后,系統進行動作過程壓力及壓力持續時間檢測,如在達到設定值前檢測到下行到位信號,則進行下一動作,刮板開始壓下;如未檢測到下行到位信號,而壓力達到設定值且壓力持續時間也達到設定值,則系統對該異常情況進行再確認,如首次發生則進行返回動作(將刮板旋起,然后再將滑板上行復位)后再進行滑板下行。如再次在該動作發生異常則停止動作進行報警。
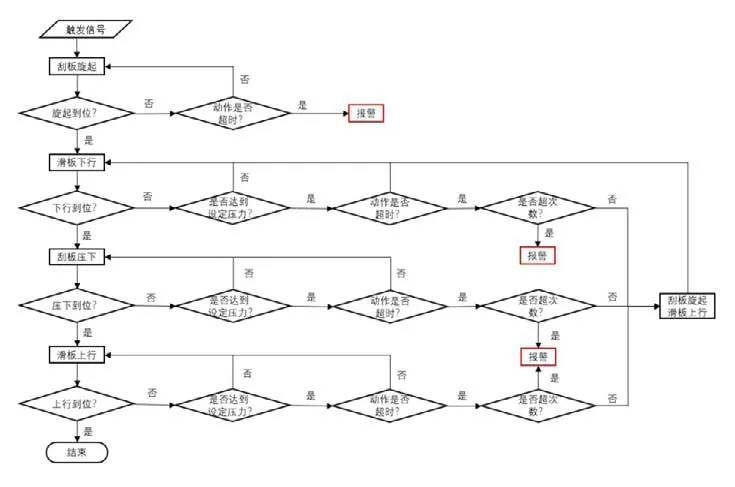
圖3 改進后工作流程
當刮板開始壓下后,系統同樣進行動作過程壓力及壓力持續時間檢測,如在達到設定值前檢測到壓下到位信號,則進行下一動作,滑板開始上行;如未檢測到壓下到位信號,而壓力達到設定值且壓力持續時間也達到設定值,則系統對該異常情況進行再確認,如首次發生則進行返回動作(將刮板旋起,然后再將滑板上行復位)后再進行滑板下行及之后動作。如再次在該動作發生異常則停止動作進行報警。
當滑板開始上行后,系統同樣進行動作過程壓力及壓力持續時間檢測,如在達到設定值前檢測到上行到位信號,則循環結束;如未檢測到上行到位信號,則壓力達到設定值且壓力持續時間也達到設定值,則系統對該異常情況進行再確認,如首次發生則進行返回動作(將刮板旋起,然后再將滑板上行復位,如此時滑板上行也達到異常情況,則停止動作進行報警)后再進行滑板下行及之后動作。如再次在該動作發生異常則停止動作進行報警。

改進后的循環流程圖3所示。
6 結語
改進后的壓填循環通過對壓力的檢測以及相應的判斷,可智能地采取相應的保護動作以更好地保護設備,使其動作更加合理;自動化程度高,避免了操作人員的誤判,使整個系統的工作更加可靠,降低設備的故障率;同時也一定程序上延長了垃圾車的使用壽命,提高了環衛部門的工作效率。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2018年11期)2018-08-04 03:25:42
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12
