汽車智能防碰撞控制系統設計探討
2020-05-24 01:19:02來君
廣西教育·B版 2020年11期
來君

【摘 要】本文針對交通車輛碰撞事故越來越嚴峻問題,講解設計一個汽車智能防碰撞控制系統的方法,選用 ADAS-SR 型 77GHz 毫米波雷達傳感器跟蹤探測汽車前方目標“距離及相對速度”;采用 STM32F103VET6 處理器分別對采集的信息進行分析比較、處理決策;當檢測到即將碰撞障礙物的“距離及相對速度”為報警設定值范圍時,控制系統自動發出報警提醒駕駛員減速操作;假如檢測到障礙物的“距離及相對速度”為危險設定值范圍駕駛員又沒有及時采取任何措施時,控制系統采取自動制動剎車措施,從而避免碰撞事故發生。通過實車安裝測試,設計的智能防碰撞控制系統控制準確度高、靈敏、穩定性高。
【關鍵詞】汽車智能防碰撞 控制系統設計 報警 智能制動 ?智能防碰撞
【中圖分類號】G ?【文獻標識碼】A
【文章編號】0450-9889(2020)42-0110-03
目前汽車已經成為現代社會人們的主要交通工具。受汽車數量的快速增長、道路擁堵及駕駛人員人為因素影響,道路上汽車碰撞事故時有發生。傳統汽車雖然都安裝有被動安全裝置,但也只是減小事故人員傷亡度的補救方法。隨著電子智能技術的快速發展,汽車主動安全技術研究成為一個熱門課題。探究交通安全事故發生的原因無非兩個:一是駕駛員自身主觀的問題(酒駕或開車不專心等),二是外部的環境客觀因素影響(突然而來的汽車、人、障礙物等)。面對突發情況,如果駕駛員能夠提前警覺危險并且快速剎車,那么將會大大減少交通事故的發生。本文設計的智能防碰撞控制系統,采用技術領先的毫米波雷達傳感智能控制技術,面對各種即將發生的事故,控制系統會提前自動發出報警,并且替代司機采取自動制動剎車措施,從而提高汽車行駛的安全性,避免發生碰撞事故,保障人們的生命安全及減少財產損失。本文設計的智能防碰撞控制系統可以廣泛安裝于各種類型汽車上,具有較大的社會實用價值。
一、汽車智能防碰撞控制系統設計
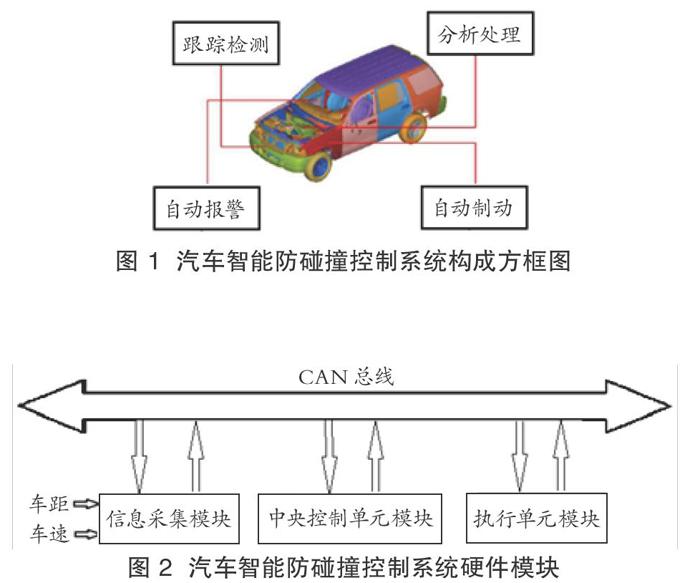
汽車智能防碰撞控制系統構成方框如圖 1 所示。
跟蹤檢測:采用毫米波雷達傳感器對汽車前方目標報警的“距離及相對速度”和危險的“距離及相對速度”進行精確跟蹤探測,通過 CAN 總線實時將探測信息輸送至中央控制單元。
分析處理:中央處理器接收到毫米波雷達傳感器傳送的信息,對汽車前方即將碰撞障礙物的“距離及相對速度”進行綜合分析、比較、處理、決策,再通過 CAN 總線向執行單元發送“報警減速或制動”的控制信號。
自動報警:當汽車與前方即將碰撞障礙物的“距離及相對速度”為“報警”設定值時,執行中央處理器下達的報警指令進行報警,提醒駕駛員進行減速操作。
自動制動:當汽車與前方即將碰撞障礙物的“距離及相對速度”為“危險”設定值時,執行中央處理器下達的制動指令,系統自動減速及緊急制動剎車。
二、硬件模塊設計
汽車智能防碰撞控制系統硬件模塊如圖 2 所示。
(一)信息采集模塊
信息采集模塊采用毫米波雷達作為核心部件。智能防碰撞控制系統通過毫米波雷達傳感器完成對汽車行駛前方目標狀態的采集工作,并通過 CAN 總線將采集信息輸送至中央控制單元。其工作原理是通過信號發射、反射、回收、混頻、放大、產生差頻,依據差頻信號計算出距離及相對速度,完成碰撞目標信息和識別路面狀態信息的采集。系統選用磁電類的 ADAS-SR 型 77GHz 防撞毫米波雷達,測量波長范圍為 1~7. 5 mm,頻譜頻率為 40~300 GHz;采用 1 TX 和 2RX 微型帶天線陣列探測前方目標障礙物信息,能跟蹤處理的目標達 32 個,探測距離達 200 m,相比其他雷達,具有遠、準、穩的特點。
(二)中央控制單元模塊
中央控制單元是智能防碰撞控制系統中樞,其作用是接收信息采集單元輸送來的信息并進行分析、處理,判斷汽車所處環境狀態是否有碰撞危險,進而決策輸出防碰撞控制指令。控制指令通過 CAN 總線輸送到執行單元采取行動措施,實現智能防碰撞控制。中央控制單元選用 ARM32 位 Cortex -M3 的 S TM32F 103 VET6,采用 100 管腳 LQFP 的封裝模式,具有功能及拓展性強、操作簡易、成本低等特點。中央控制單元需要外接 2MB 的 Flash、復位電路、晶振電路、穩壓電源電路。穩壓電源電路選用 LTC6655 為電壓基準芯片,可輸出多組電壓,該芯片選用輸出 3V 電壓供電,電壓精度達 0.02 級,電流輸出高達 1A,使芯片運行很平穩,同時集成芯片設計有限流保護及過熱關斷保護功能。
(三)執行單元模塊
執行單元模塊作用是接收控制指令實現自動報警提示以及智能減速制動。主要由報警裝置、制動執行機構、節氣門執行機構三部分組成。
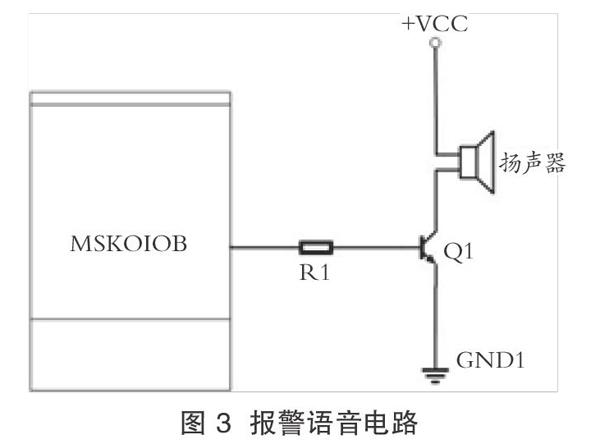
1.報警裝置。報警裝置選用 MSKOlOB 芯片,重復擦除燒寫語音功能強大,控制方法靈活。當檢測到汽車與前方即將碰撞障礙物的“距離及相對速度”為“報警”設定范圍時,中央控制單元輸出控制指令觸發 MSKOlOB 產生報警語音信號,信號經放大推動喇叭報警。報警電路如圖 3 所示。
2.制動執行機構。制動執行機構核心部件是制動缸及電磁直線執行裝置,把電磁直線執行裝置安裝于制動缸的活塞內。當毫米波雷達檢測到汽車與前方即將碰撞障礙物的“距離及相對速度”為“危險”設定范圍時,中央控制單元對采集到的信息進行分析比較、決策,然后控制脈寬調制(PWM)電路輸出脈寬調制電壓信號,電壓信號經過驅動電路轉化為電流信號,電流流過電磁直線執行裝置產生電磁力,電磁力驅動液壓缸活塞移動,從而對汽車車輪施加制動力,實施緊急制動剎車。
3.節氣門執行機構。節氣門執行機構主要包括控制電路、驅動電路、直流電動機三部分。如圖 4 所示。
當汽車與前方即將碰撞障礙物的“距離及相對速度”為“報警或危險”設定范圍時,節氣門執行機構執行中央處理器下達的減速指令,自動調節節氣門開度使汽車減速。控制電路作用是依據中央控制單元的控制指令輸出一個脈寬可調、頻率為 100Hz 的 PWM 電流信號;電流信號經過驅動電路處理、放大后驅動直流電動機改變節氣門開度。驅動電路如圖 5 所示。
直流電動機的控制采用線性驅動及脈寬調制的方式。通過調制 PWM 占空比實現直流電機的電樞電壓改變,以控制直流電動機的扭矩,使電子節氣門開度改變進行自動減速。
三、軟件系統設計
(一)系統主流程
控制系統設計利用毫米波雷達傳感器對汽車行駛前方目標進行跟蹤探測,實時獲取距離和相對速度等信息,信息經過與設定的安全閾值比較、分析處理后判斷汽車是否處在設定的安全范圍內。假如探測到前方即將碰撞障礙物的“距離及相對速度”達報警設定值時,報警裝置自動報警提醒駕駛員進行減速操作,如果駕駛員沒有及時采取任何行動措施,并且判斷前方即將碰撞障礙物的“距離及相對速度”為危險設定值范圍時,系統的制動機構采取自動制動剎車措施,實現汽車的智能防碰撞控制,從而避免汽車發生碰撞交通事故。
智能防碰撞控制系統軟件采用 KeiluVision4 作為設計環境。依據汽車安全行駛制動特性要求,設定安全距離與相對速度對應值。當車分別以 10km/h,30km/h,5Okm/h,70km/h,90km/h 的行駛相對速度時,毫米波雷達報警距離設定為 9m,13m,29m,52m,68m,對應危險制動距離設定為 1.5m,3.5m,9.5m,20.5m,26.5m,34.5m,制動閾值設定為1.8m,3.8m,9.8m,20.8m,26.8m,34.8m。智能防碰撞控制系統軟件主流程如圖 6 所示。
(二)報警及危險處理子程序流程
汽車行駛于不同車速時,汽車智能防碰撞控制系統能進行實時快速分析、比較、判斷,如果汽車與前方目標物間距小于或等于報警距離時,控制系統就會判定當前汽車處于臨近危險狀態并提醒司機進行減速操作,如果報警后司機還不采取任何行動,且達到小于或等于危險距離時汽車自動制動剎車,以免發生碰撞事故,保障汽車駕駛的安全行駛。汽車智能防碰撞控制系統的報警及危險處理子程序流程如圖 7 所示。
四、實驗測試
選用 1.4T 速騰車型安裝智能防碰撞控制系統進行實驗測試。
(一)毫米波雷達報警實驗
為了安全,采用低速 10km/h,15km/h,20km/h,25km/h,30km/h 的行駛速度分別測試毫米波雷達報警時汽車與前方障礙物目標的實際距離,測試的實際距離與設定的值進行比較,誤差為 0.07~0.20m,測試結果說明智能防碰撞控制系統毫米波雷達報警的靈敏度達到本設計要求。
(二)緊急制動實驗
為了安全,采用低速 10km/h,15km/h,20km/h,25km/h,30km/h 的行駛速度分別測試毫米波雷達報警直至車自動減速、制動停止,測試車與前方障礙物之間的間距與設定的最小制動閾值比較,測試結果符合設計要求。
五、結論
汽車智能防碰撞控制系統硬件設計選用毫米波雷達傳感器跟蹤探測前方目標距離及相對速度,利用 KeiluVision4 進行軟件流程設計,通過 STM32F 103 VET6 處理器對跟蹤探測信息實時進行分析、處理、決策,使控制執行單元準確無誤報警、減速、制動。通過實車低速實驗測試,測試結果表明該智能防碰撞控制系統完成報警、減速、制動、停車的智能控制過程靈敏度及準確度高,運行穩定,測試指標均達到設計的要求。各種類型汽車均可安裝使用該智能防碰撞控制系統,這個系統在汽車工程領域具有較大的應用前景。
【參考文獻】
[1]肖廣兵,陳有超,等.基于 Google Earth 的車輛防碰撞虛擬仿真系統[J].軟件導刊,2019(10).
[2]李海青,趙又群,林 棻,等.汽車高速緊急避障路徑跟蹤與主動防側翻控制[J].哈爾濱工業大學學報,2019(7).
[3]裴紅蕾.智能汽車換道避障路徑規劃與跟蹤方法[J].中國安全科學學報,2018(9).
[4]周中升,張燕軍,李竹峰.智能汽車路徑跟蹤控制方法設計[J].農業裝備技,2019(3).
[5]甄曉陽.國內智能網聯汽車概況及發展建議[J].汽車工程師,2018(12).
【作者簡介】來 君(1970— ),女,廣西南寧人,廣西機電工程學校高級講師,研究方向為汽車電氣系統智能控制。
(責編 李 言)