基于深度學習的車輛識別系統設計
2020-05-25 02:54:34王瀚唐嵐
科技風 2020年15期
關鍵詞:深度學習
王瀚 唐嵐

摘 要:本設計針對無人駕駛中目標識別問題,設計了一種基于深度學習的車輛識別系統。該系統一共包括三大模塊,分別是圖像采集模塊、圖像預處理模塊和圖像識別模塊。其中圖像采集模塊以兩百萬像素的工業攝像頭為核心對圖像進行采集。圖像預處理模塊包括圖像增強、圖像去噪、模糊圖像復原。圖像識別模塊以深度學習為核心對車輛進行識別。通過相關算法對質量下降的圖片進行有效處理提高圖片質量,本文構建的基于深度神經網絡的模型可以對圖像中的車輛進行有效識別,具有一定的實際價值。
關鍵詞:深度學習;圖像預處理;圖像識別;試驗驗證
隨著新一輪科技和產業革命興起,智能技術已經滲透到人們日常中,自動駕駛作為智能化和網聯化發展的高級形態,成為汽車行業競相角逐的陣地,同時人工智能在功能和應用方面的突破性進展將推動汽車行業新一輪發展。
1 基于深度學習的車輛識別系統設計
基于深度學習的車輛識別系統中系統設計方案如下所示。該系統由圖像采集,圖像與處理,以及圖像識別三個模塊組成。
1.1 圖像采集模塊
本文實驗所涉及到的設備有實驗相機和實驗車輛。根據實際情況使用了工業攝像頭作為本次實驗的圖像采集傳感器。
1.2 圖像預處理模塊
1.2.1 圖像增強
在對圖像拍攝、傳輸以及顯示的過程中,由于成像設備、傳輸系統或顯示系統的原因,以及周圍環境的影響最終造成圖像退化和質量下降。由于造成圖像質量下降的原因十分復雜,所以本文基于車輛識別中所遇到的常見現象,采用了基于直方圖均勻化的算法對圖像進行了增強,該方法算法簡單且適用范圍廣,在圖像增強、光照補償、圖像去霧等方面取得很好的效果[1],可以讓圖片達到更加清晰的效果,從而提高車輛識別的準確率。
1.2.2 圖像去噪
本文選定高斯濾波模板大小:5×5,σ2=0.2,u=0;利用二維高斯離散函數計算高斯模板內每個小窗口的高斯濾波權重值;計算高斯模板窗口內每個點的像素值乘以權重系數后的和,然后用該值替換中心點像素值,最后輸出圖像。
1.3 圖像運動復原
在目標與相機在曝光時間內產生相對運動引起成像模糊,使圖像中原本銳利的邊緣退化成拖影,運動模糊的圖像會直接影響圖像關鍵信息的獲取[2]。所以為了準確識別物體,對圖像進行運動復原是很有必要的。針對車輛識別實際任務,本文采取了以傅里葉變換[3],Radon變換[3]為核心的運動模糊復原對圖像進行復原處理。該算法對模糊圖像的處理效果明顯,基本達到了預期的效果。
2 圖像識別模塊
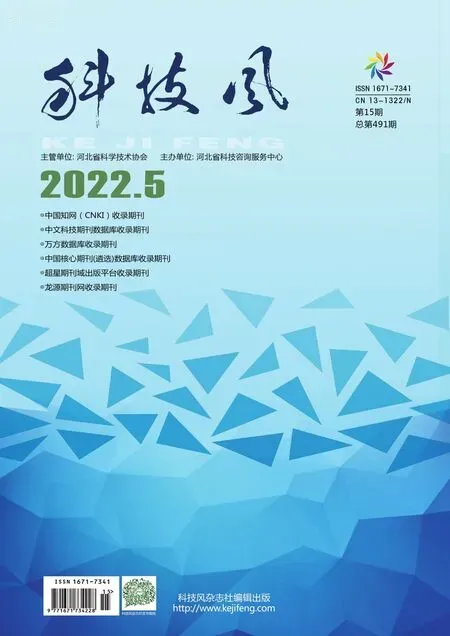
自動駕駛核心之一就是如何對圖像中車輛的特征進行有效,準確的提取,并讓計算機通過提取的特征來識別目標[4],從而實現對周圍環境的目標識別,識別和避障,實現無人駕駛目的。本文主要介紹基于卷積神經網絡的特征提取方法。
2.1 深度神經網絡模型的訓練
神經網絡的訓練。本文采用的是隨機梯度下降算法[5],將神經網絡模型的訓練過程則轉化成一個尋找最優的過程,通過定義模型的損失函數,在一定的約束條件下尋找使得該模型損失函數達到最小值的參數,本文中設定交叉熵函數[6]為該模型的損失函數,找到的這個參數即為神經網絡中神經元的學習權重,其原理及流程如下所示:
在神經網絡模型訓練時,采用參數前饋傳播來尋找損失函數的極小值來更新模型的參數,當損失函數達到全局最小值的時候,模型的準確率就到達最大值,接下來就利用有關算法尋找損失函數的全局最小值,本文使用了隨機梯度下降算法。
2.2 樣本識別
2.3 深度神經網絡的搭建
在遷移學習的基礎上本文采用的是AlexNet網絡結構根據本文實際任務搭建模型及設置各層參數如下:
3 實驗工況
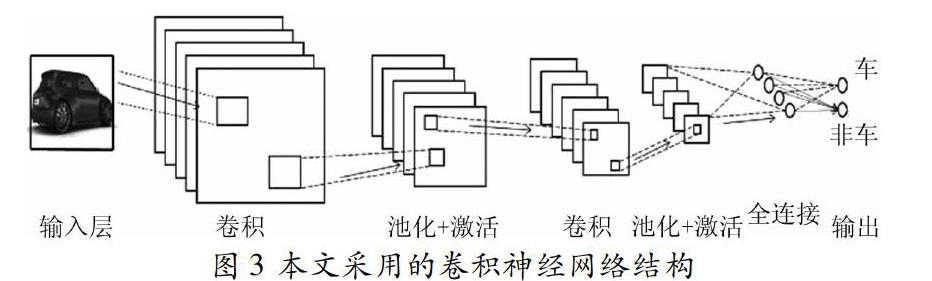
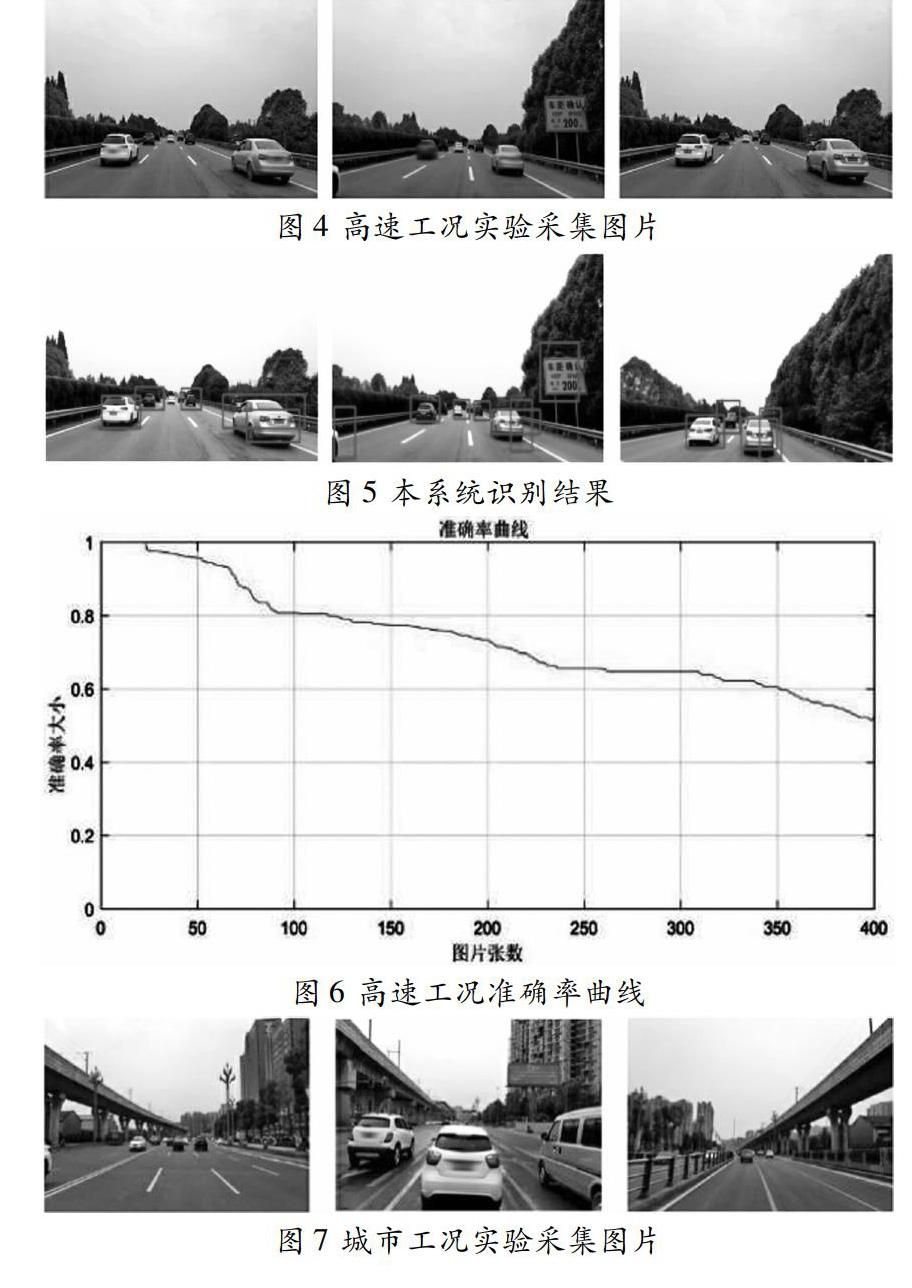
為了驗證系統的準確性,本文在一些常見工況下進行實驗,包括視野較好,基本無車輛相互遮擋,單向行駛的高速公路工況(都江堰至郫縣紅光路段);視野較差,車輛相互遮擋情況嚴重以及存在建筑物干擾的城市工況(西華大學南門至犀浦路段)。采集圖像信息如下:
對實驗中采集到的每張圖片進行人工標注,即標注圖片中所要識別的車輛。該方法借助MATLAB中training Image Labeler工具箱完成。
4 實驗結果
高速路工況和城市工況下準確率與平均召回率大小如下所示:
5 總結
根據以上實驗結果可以得知,在高速路工況和城市的識別準確率和召回率都大于60%。高速路工況的準確率與召回率皆高于城市工況下的準確率與識別率。進一步分析可以得出,由于高速路工況下的車輛全部為單向行駛,車輛間的相互遮擋現象也比較少,在對車輛進行識別時,被識別的車輛屬于背向試驗車輛,因此特征較為明顯,模型準確率與召回率較高;相反在城市工況下的試驗車輛,由于工況復雜,在采集圖片時容易受到車輛間的相互遮擋影響,從而造成車輛特征提取較弱,另外在城市工況下存在大量同向行駛的車輛以及停放在路旁靜止的車輛,因此對于被識別車輛而言特征太多導致模型的準確率與召回率低于高速工況。但是整體而言,本實驗所采用的模型依然具有一定的實際運用價值。
參考文獻:
[1]王超,孫玉秋,徐石瑤,余美晨,李祖勝.自適應直方圖均衡圖像增強算法研究[J].長江大學學報(自科版),2018,15(01):55-59+7.
[2]陳文靜,蘇顯渝,曹益平,向立群.傅里葉變換輪廓術中抑制零頻的新方法[J].中國激光,2004(06):740-744.
[3]張強,李嘉鋒,卓力.車輛識別技術綜述[J/OL].北京工業大學學報,1-11.
[4]夏鵬飛.基于HOG的多特征融合行人識別跟蹤系統[D].南昌航空大學,2017.
[5]靳冬歡.基于隨機并行梯度下降算法的波前校正技術研究[D].國防科學技術大學,2006.
[6]Anon.Unsupervised Search-based Structured Prediction[J].Advances in Neural Information Processing Systems,2015.
作者簡介:王瀚(1992-),女,四川成都人,碩士,從事無人駕駛方面的研究。
猜你喜歡
中國教育技術裝備(2016年19期)2016-12-27 19:23:52
中國遠程教育(2016年11期)2016-12-27 18:07:31
現代商貿工業(2016年25期)2016-12-26 09:58:02
江蘇教育·中學教學版(2016年11期)2016-12-21 11:45:08
江蘇教育·中學教學版(2016年11期)2016-12-21 11:36:29
現代情報(2016年10期)2016-12-15 11:50:53
考試周刊(2016年94期)2016-12-12 12:15:04
新教育時代·教師版(2016年23期)2016-12-06 06:02:38
法制與社會(2016年32期)2016-12-01 15:25:53
軟件導刊(2016年9期)2016-11-07 22:20:49