交流伺服系統(tǒng)的高響應(yīng)電流環(huán)控制
2020-06-03 02:28:32趙云廖政斌王澤飛蔡美東
趙云, 廖政斌, 王澤飛, 蔡美東
(湖北工業(yè)大學(xué) 太陽能高效利用及儲(chǔ)能運(yùn)行控制湖北省重點(diǎn)實(shí)驗(yàn)室, 湖北 武漢 430070)
通過控制永磁同步電機(jī)(PMSM),交流伺服系統(tǒng)可實(shí)現(xiàn)高效率、高精度、高響應(yīng)性能的目標(biāo)[1-2].常用的控制方式有比例-積分(PI)控制和滯環(huán)控制.PI控制雖然簡單、方便,但交軸(q軸)與直軸(d軸)存在耦合,影響電流環(huán)動(dòng)態(tài)響應(yīng)[3];滯環(huán)控制的電流環(huán)響應(yīng)雖快,但該算法下的開關(guān)頻率不固定,輸出的電流含有諧波畸變,且存在穩(wěn)態(tài)誤差[4-5].因此,為了提高伺服系統(tǒng)電流環(huán)響應(yīng)性能,保證電流穩(wěn)定輸出,可通過速度指令前饋和加速度指令前饋提高系統(tǒng)響應(yīng),并通過三次諧波的注入降低調(diào)制波的幅值,提高直流電流的利用率.文獻(xiàn)[6-7]在一個(gè)載波周期內(nèi)對定子電流進(jìn)行雙采樣和雙脈沖寬度調(diào)制(PWM)刷新,以減少采樣延時(shí),提高系統(tǒng)的響應(yīng)性能.然而,以上方法在提高電流環(huán)帶寬方面都較為單一.基于此,本文針對不同的延時(shí)采取不同解決方法,提出一種復(fù)矢量解耦的電流環(huán)預(yù)測控制算法.
1 交流伺服系統(tǒng)電流環(huán)PI控制性能分析
1.1 電流環(huán)模型

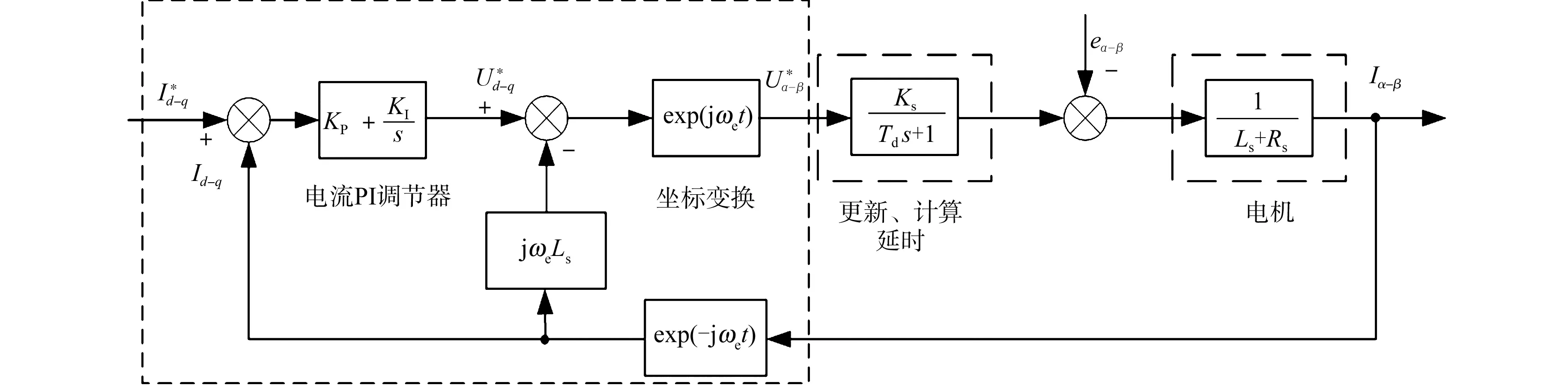
圖1 電流環(huán)PI控制算法的結(jié)構(gòu)框圖Fig.1 Structural block diagram of current loop PI control algorithm
在同步旋轉(zhuǎn)坐標(biāo)系下,可得q軸電壓Uq為

(1)
式(1)中:Iq為q軸電流;ψf為永磁體磁鏈.

(2)
式(2)中:ΔIq為q軸電流的變化量.

(3)
式(3)中:Tc為一個(gè)控制周期.
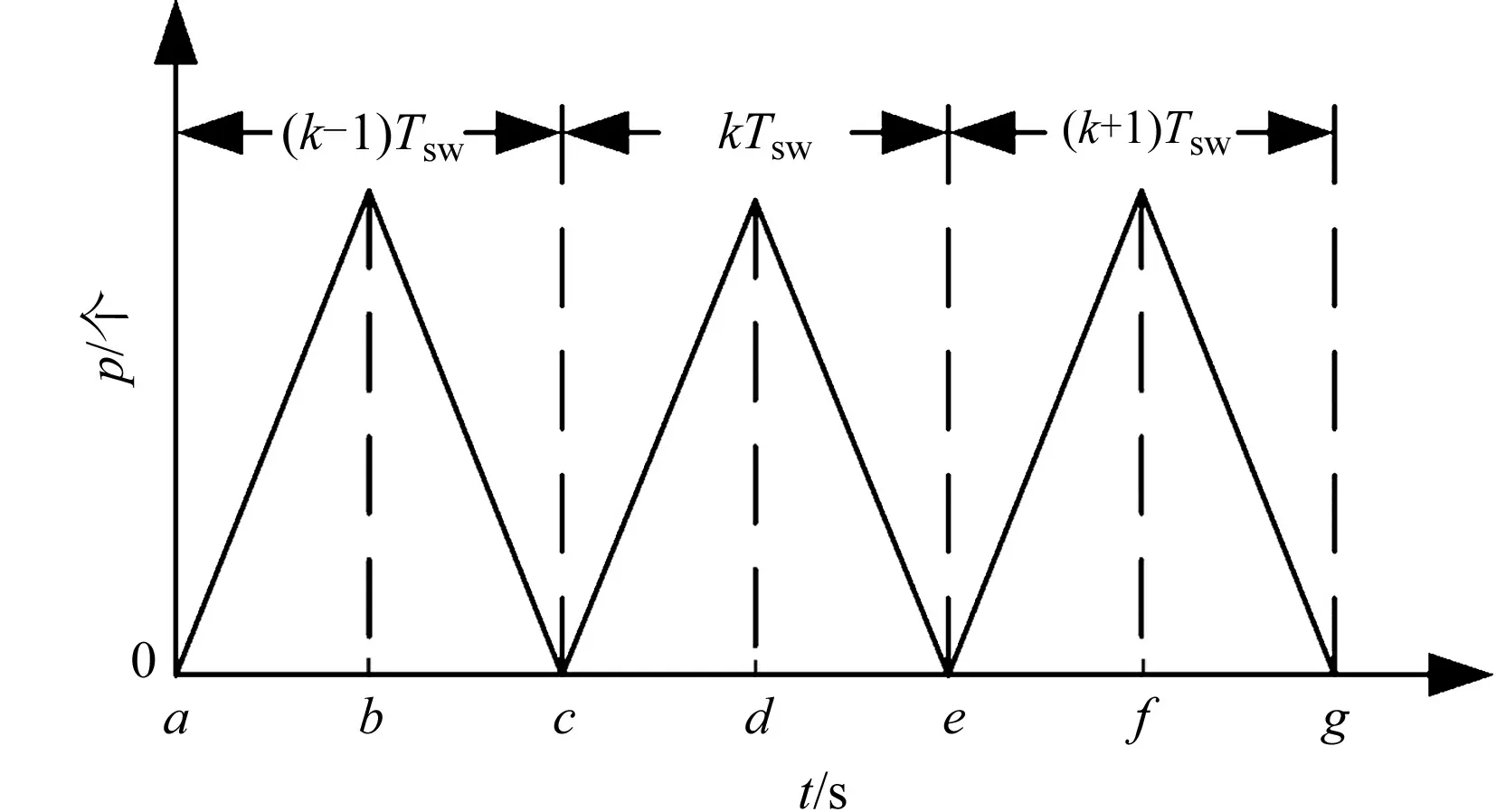
圖2 電流采樣時(shí)序示意圖Fig.2 Schematic diagram of current sampling sequence
由式(4)可知:電流環(huán)帶寬和控制周期成反比.一個(gè)控制周期Tc存在采樣延時(shí)、控制算法計(jì)算延時(shí)和PWM輸出延時(shí)等情況,從而影響電流環(huán)響應(yīng)性能.電流采樣時(shí)序示意圖[8],如圖2所示.圖2中:p為脈沖個(gè)數(shù);a~g為采樣時(shí)刻;k為周期個(gè)數(shù);Tsw為逆變器開關(guān)周期.
1.2 電流環(huán)延時(shí)分析
在PI控制算法的電流采樣中,Tc=Tsw.占空比在脈沖數(shù)遞減為0時(shí)刻進(jìn)行更新;在a時(shí)刻,系統(tǒng)對電流進(jìn)行采樣,得到采樣電流,通過電流環(huán)預(yù)測控制算法計(jì)算逆變器輸出占空比,再執(zhí)行其他控制任務(wù);在c時(shí)刻,系統(tǒng)將占空比更新到PWM發(fā)生器的比較單元,并在該開關(guān)周期內(nèi)保持不變;在e時(shí)刻,逆變器產(chǎn)生輸出電壓.由此可知,典型電流采樣時(shí)序的電流環(huán)延時(shí)Td=2Tc.
為改善輸出電壓滯后的問題,采用占空比雙次刷新電流采樣,占空比在脈沖數(shù)遞增到峰值時(shí)刻和遞減到0時(shí)刻進(jìn)行更新,電流環(huán)的控制周期縮減一半,即Tc=0.5Tsw,電流環(huán)延時(shí)變?yōu)門d=Tc,但控制周期的減小會(huì)加重運(yùn)算負(fù)荷,因此,對控制器運(yùn)算性能要求較高.
占空比雙次刷新PI控制算法雖然可解決電壓輸出滯后的問題,但電流采樣仍存在延時(shí).在占空比雙次刷新電流環(huán)預(yù)測控制算法中,在a時(shí)刻進(jìn)行電流采樣,通過數(shù)字信號(hào)處理器(DSP)的模數(shù)轉(zhuǎn)換進(jìn)行坐標(biāo)變換,并與給定電流進(jìn)行比較;再通過電流環(huán)預(yù)測控制算法進(jìn)行控制,從而產(chǎn)生下一個(gè)控制周期起點(diǎn)(b時(shí)刻)的控制電壓[9];最后,進(jìn)行占空比的計(jì)算和PWM的更新.該過程雖然通過電流預(yù)測下一個(gè)控制周期的電壓抵消了電流采樣延時(shí),但仍存在一個(gè)控制周期的延時(shí)[10],即Td=0.5Tc.
2 復(fù)矢量解耦的電流環(huán)預(yù)測算法
本時(shí)刻采樣的電流通過預(yù)測控制算法可得到下一時(shí)刻的預(yù)測電壓,并作為電流環(huán)的輸出[11],從而抵消采樣延時(shí),減少控制延時(shí),提高電流環(huán)響應(yīng)性能.通過對d-q軸電壓進(jìn)行復(fù)矢量解耦[12-13],可進(jìn)一步提高電流環(huán)響應(yīng)性能.
2.1 電流環(huán)預(yù)測控制
電流環(huán)預(yù)測控制算法的數(shù)學(xué)模型有如下4點(diǎn)假設(shè):1) 忽略電機(jī)的鐵心飽和;2) 不計(jì)電機(jī)的渦流損耗和磁滯損耗;3) 轉(zhuǎn)子上沒有阻尼繞組,永磁體也無阻尼作用;4) 電機(jī)的感應(yīng)反電動(dòng)勢為正弦波.
永磁同步電機(jī)在旋轉(zhuǎn)坐標(biāo)系下的電壓方程[10]為
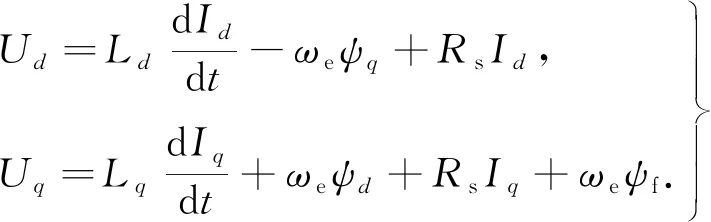
(5)
式(5)中:Ud為永磁同步電機(jī)的d軸電壓;Id為d軸電流;ψd,ψq分別為d軸磁鏈和q軸磁鏈;Ld,Lq分別為d軸電感和q軸電感.
在表貼式同步電機(jī)中,有Ld=Lq=Ls,由電壓方程可推出電流的狀態(tài)方程[10]為

(6)

(7)
式(7)中:t0為初始時(shí)間;τ為時(shí)間變化值.
u在t0~t恒不變,設(shè)t0=kTs,t=(k+1)Ts[10],Ts為采樣時(shí)間,可得
x(k+1)=Aφx(k)+A-1(Aφ-E)Bu(k)+A-1(Aφ-E)D(k).
(8)

(9)
根據(jù)電流環(huán)預(yù)測控制原理,I(k+1)=I*(k+1),故第k個(gè)周期的控制變量U(k)為

(10)


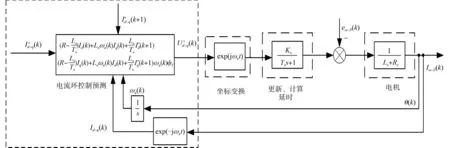
圖3 電流環(huán)預(yù)測控制算法的結(jié)構(gòu)框圖Fig.3 Structural block diagram of current loop predictive control algorithm
2.2 復(fù)矢量解耦控制

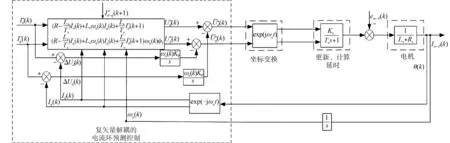
圖4 復(fù)矢量解耦的電流環(huán)預(yù)測控制算法的結(jié)構(gòu)框圖Fig.4 Structural block diagram of current loop predictive control algorithm of complex vector decoupling

3 仿真實(shí)驗(yàn)分析
在Matlab/Simulink軟件中,采用PI控制算法和電流環(huán)預(yù)測控制算法進(jìn)行仿真.電機(jī)參數(shù):電機(jī)額定電流為6 A;額定轉(zhuǎn)速為2 000 r·min-1;額定轉(zhuǎn)矩為5 N·m;定子電阻為3.15 Ω;定子磁鏈為0.175 Wb;定子電感為0.008 5 H;電機(jī)極對數(shù)為4;轉(zhuǎn)動(dòng)慣量為0.008 kg·m2.
直流母線電壓為310 V,電流采樣頻率為20 kHz,載波頻率為10 kHz.在0時(shí)刻,速度給定為1 000 r·min-1的階躍指令,并在0.10 s時(shí),突加5 N·m的恒定負(fù)載.三相電流和d-q軸電流波形均可反映交流伺服系統(tǒng)瞬態(tài)和穩(wěn)態(tài)的運(yùn)行情況.
PI控制算法和電流環(huán)預(yù)測控制算法下的三相電流和d-q軸電流,如圖5所示.圖5中:I為電流.由圖5(a)可知:PI控制算法的電流含有大量的諧波,這是由于該算法存在嚴(yán)重的滯后問題,波形中含有大量的噪聲導(dǎo)致波形成非正弦.由圖5(b)可知:電流環(huán)預(yù)測控制算法的三相電流波形基本為正弦波.由圖5(c),(d)可知:當(dāng)0.10 s突加負(fù)載時(shí),圖5(d)的d軸電流比圖5(c)的波動(dòng)更小;在穩(wěn)態(tài)情況下,無論電機(jī)空載或帶載,相較于PI控制算法,電流環(huán)預(yù)測控制算法的d-q軸電流波動(dòng)較小.
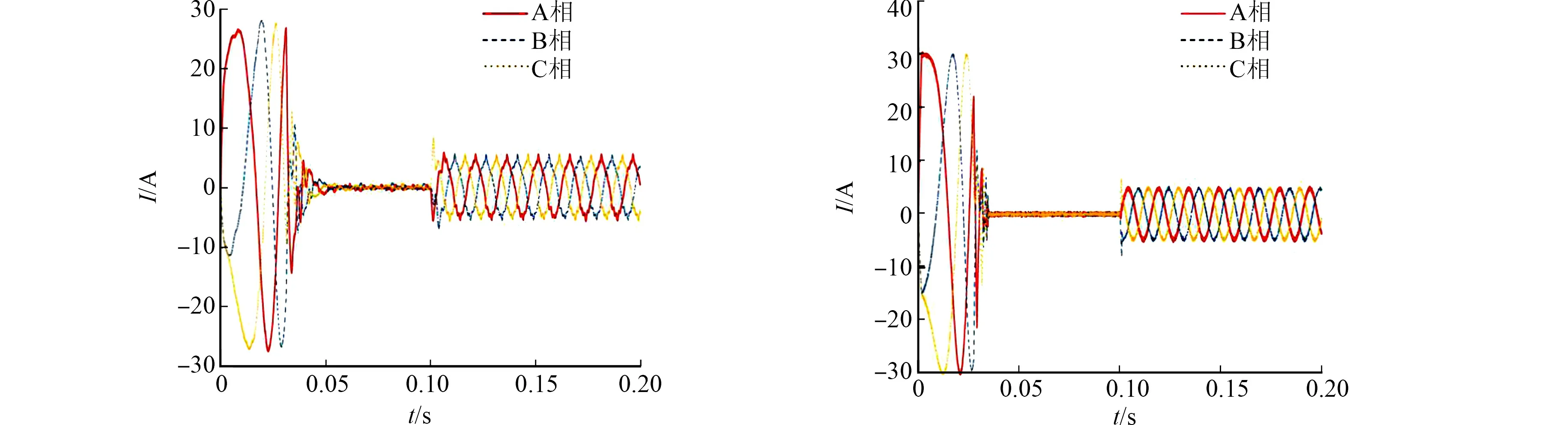
(a) 三相電流(PI控制算法) (b) 三相電流(電流環(huán)預(yù)測控制算法)

(c) d-q軸電流(PI控制算法) (d) d-q軸電流(電流環(huán)預(yù)測控制算法)圖5 不同算法的三相電流和d-q軸電流Fig.5 Three-phase current and d-q axis current of different algorithms
電流環(huán)預(yù)測控制算法的未解耦和解耦的d-q軸電流,如圖6所示.由圖6可知:d-q軸解耦和未解耦的d軸電流波形在電機(jī)啟動(dòng)時(shí)都有波動(dòng),但解耦的d軸電流波動(dòng)較小;當(dāng)0.10 s突加負(fù)載時(shí),未解耦的d軸電流有1.2 A的跳動(dòng),而解耦的電流基本保持恒定;解耦和未解耦的q軸電流基本沒有變化.因此,解耦對改善電流具有一定的作用.

圖7 不同算法的轉(zhuǎn)速響應(yīng)波形Fig.7 Rotational speed response waveform of different algorithms
PI控制算法(占空比單次刷新)的電流采樣頻率為10 kHz,PI控制算法(占空比雙次刷新)的采樣頻率為20 kHz,未解耦和解耦的電流環(huán)預(yù)測控制算法的電流采樣頻率皆為20 kHz,載波頻率皆為10 kHz.在0時(shí)刻,速度給定1 000 r·min-1的階躍指令,不同算法的轉(zhuǎn)速(ωe)響應(yīng)波形,如圖7所示.由圖7可知:PI控制算法(占空比單次刷新)的轉(zhuǎn)速響應(yīng)最慢,PI控制算法(占空比雙次刷新)的轉(zhuǎn)速響應(yīng)次之;未解耦的電流環(huán)預(yù)測控制算法的轉(zhuǎn)速響應(yīng)較快,解耦的電流環(huán)預(yù)測控制算法進(jìn)一步提高轉(zhuǎn)速響應(yīng).然而,轉(zhuǎn)速響應(yīng)波形在反映電流環(huán)響應(yīng)快慢方面具有一定的局限性,為了更精確地分析不同算法的電流環(huán)響應(yīng)速度,可以采用頻域分析方法.
從頻域的角度分析電流環(huán)響應(yīng),閉環(huán)截止頻率越大,系統(tǒng)的瞬態(tài)響應(yīng)速度越快.向系統(tǒng)電流環(huán)d軸輸入幅值一定的正弦激勵(lì),通過改變激勵(lì)的頻率,直至幅值衰減為最大值的0.707倍,此時(shí),激勵(lì)的頻率為系統(tǒng)電流環(huán)的帶寬頻率(截止頻率).
在Simulink仿真軟件中,向電流環(huán)d軸輸入幅值為1 A的正弦激勵(lì),通過改變激勵(lì)的頻率分別得到PI控制算法和電流環(huán)預(yù)測控制算法的電流環(huán)帶寬頻率.不同算法的d軸輸出響應(yīng)波形,如圖8所示.
由圖8可知:電流環(huán)d軸輸入正弦激勵(lì)的頻率分別為1 607,3 183,4 293,4 535 Hz,輸出響應(yīng)幅值均衰減為其最大值的0.707倍,解耦的電流環(huán)預(yù)測控制算法的電流環(huán)帶寬最寬,響應(yīng)最快.因此,從頻域角度分析也可得到相同的結(jié)論.
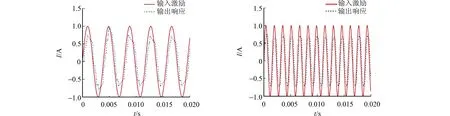
(a) PI控制算法(占空比單次刷新) (b) PI控制算法(占空比雙次刷新)
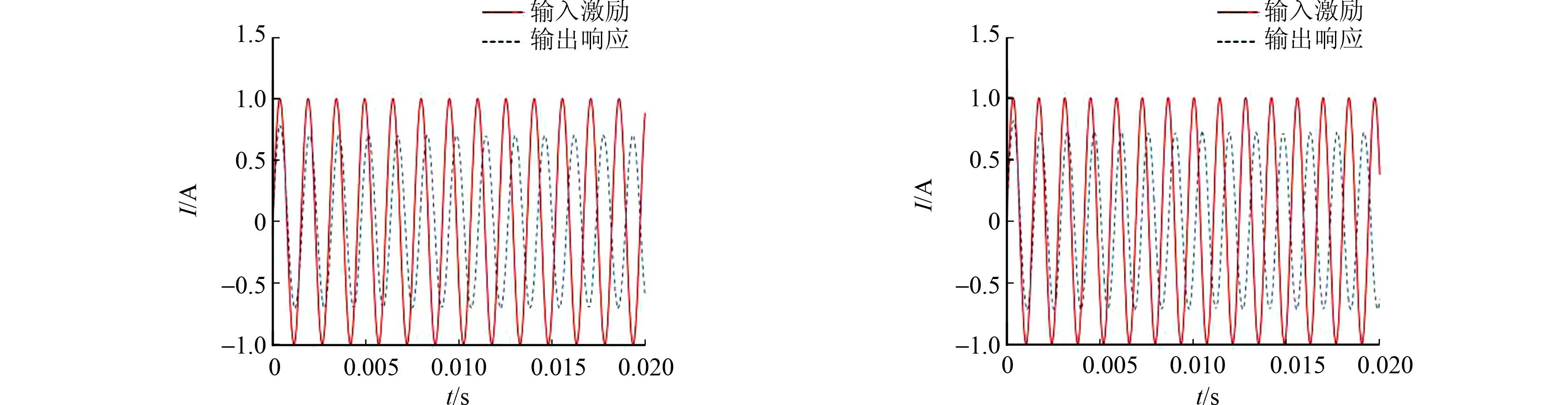
(c) 未解耦的電流環(huán)預(yù)測控制算法(占空比雙次刷新) (d) 解耦的電流環(huán)預(yù)測控制算法(占空比雙次刷新)圖8 不同算法的d軸輸出響應(yīng)波形Fig.8 d axis output response waveform of different algorithms
4 結(jié)束語
分析電壓輸出滯后、電流采樣延時(shí)和d-q軸電壓耦合等限制電流環(huán)帶寬提高的影響因素,針對不同的延時(shí)問題,采用不同的解決方法.采用一個(gè)控制周期內(nèi)占空比雙次刷新的方法,改善電壓輸出滯后問題;采用電流環(huán)預(yù)測控制算法,改善電流采樣延時(shí)問題;采用復(fù)矢量解耦控制的方法,解決d-q軸電壓耦合的問題.仿真實(shí)驗(yàn)結(jié)果表明:相較于PI控制算法,復(fù)矢量解耦的電流環(huán)預(yù)測控制算法能夠使電流環(huán)響應(yīng)得到改善.
