氣缸的摩擦機(jī)理與研究分析
2020-06-03 04:44:20蘇威蔣文書
科技資訊 2020年12期
蘇威 蔣文書

摘? 要:氣缸因?yàn)榍鍧崱⒔Y(jié)構(gòu)簡單、廉價(jià)等優(yōu)點(diǎn)而越來越受到廣泛的應(yīng)用,更因?yàn)槠浼苫膬?yōu)勢(shì)而在機(jī)器人等方面有幾乎不可替代的作用。但是氣缸也有本身不能夠精確控制的弱點(diǎn),主要是氣缸在低速運(yùn)行的情況下會(huì)產(chǎn)生爬行現(xiàn)象。而如何消除這一現(xiàn)象成為當(dāng)前研究氣動(dòng)技術(shù)的一個(gè)重要方向。該課題主要以一個(gè)普通的氣缸低速爬行現(xiàn)象模型為研究對(duì)象,以實(shí)現(xiàn)氣缸可以低速平穩(wěn)運(yùn)行為研究目標(biāo),利用理論分析和AMESim仿真模擬相結(jié)合的方法,從建立精確的控制框圖入手,深入研究通過顫振疊加來消除氣缸低速爬行現(xiàn)象的方法。
關(guān)鍵詞:顫振信號(hào)? 控制框圖? 低速爬行現(xiàn)象? 仿真模擬? 氣缸
中圖分類號(hào):TH138 ? ?文獻(xiàn)標(biāo)識(shí)碼:A 文章編號(hào):1672-3791(2020)04(c)-0051-02
1? 氣缸摩擦模型的研究
如圖1所示,氣壓源通過A向無桿腔充氣,壓力上升;而有桿腔通過B排氣,壓力下降。當(dāng)兩側(cè)壓力差可以克服活塞與活塞桿的最大靜摩擦力時(shí),活塞開始移動(dòng)。我們都知道最大靜摩擦力小于動(dòng)摩擦力,所以活塞開始運(yùn)動(dòng)的時(shí)候是做加速運(yùn)動(dòng)。隨著無桿腔容積變化較大時(shí),而氣壓源的供氣又跟不上,此時(shí)無桿腔內(nèi)壓力減小,有桿腔內(nèi)壓力升高。當(dāng)兩側(cè)壓力差所產(chǎn)生的作用力等于動(dòng)摩擦?xí)r,氣缸停止加速。但是由于慣性,氣缸仍會(huì)向前運(yùn)動(dòng),由于兩側(cè)的壓力差所產(chǎn)生的作用力小于動(dòng)摩擦力,氣缸做減速運(yùn)動(dòng),直到速度為零,氣缸停止,等到無桿腔內(nèi)壓力上升,氣缸才會(huì)繼續(xù)運(yùn)動(dòng)。一直保持重復(fù)著上面的運(yùn)動(dòng)。這個(gè)過程稱為氣缸的爬行現(xiàn)象。
2? 爬行現(xiàn)象的解決方法
該文采用消除爬行現(xiàn)象的主要方法是疊加一個(gè)正弦的顫振信號(hào),如圖2所示。
顫振補(bǔ)償是將高頻信號(hào)引入系統(tǒng)當(dāng)中從而改善系統(tǒng)動(dòng)態(tài)性能的一種方法。在氣動(dòng)系統(tǒng)中加入高頻顫振信號(hào)使得整個(gè)氣動(dòng)系統(tǒng)都在高頻低幅的抖動(dòng)中,系統(tǒng)的這種狀態(tài)能夠平滑低速下的不連續(xù)力,從而提高系統(tǒng)的動(dòng)態(tài)性能。顫振信號(hào)補(bǔ)償策略是根據(jù)系統(tǒng)的相關(guān)特性進(jìn)行的一種補(bǔ)償措施。在克服摩擦力影響中,顫振信號(hào)存在兩種加入方法,主要對(duì)為了減小摩擦系數(shù)的加法進(jìn)行敘述,對(duì)另一種方法不做敘述。
如圖3所示,Uc=U(t)+Uk(t),U(t)是PID的一個(gè)輸出,Uk(t)是所疊加的顫振信號(hào),而Uc則是輸出信號(hào)與輸入信號(hào)的一個(gè)匯總。U(t)信號(hào)可以使得氣缸以一個(gè)低速的運(yùn)動(dòng)方式進(jìn)行運(yùn)動(dòng),所以U(t)是一個(gè)低斜率的斜坡信號(hào),斜率根據(jù)系統(tǒng)的具體情況來定。Uk(t)是一個(gè)等幅等頻的正弦信號(hào),具體數(shù)學(xué)式需調(diào)試確定,它是用來消除氣缸的低速爬行現(xiàn)象的。
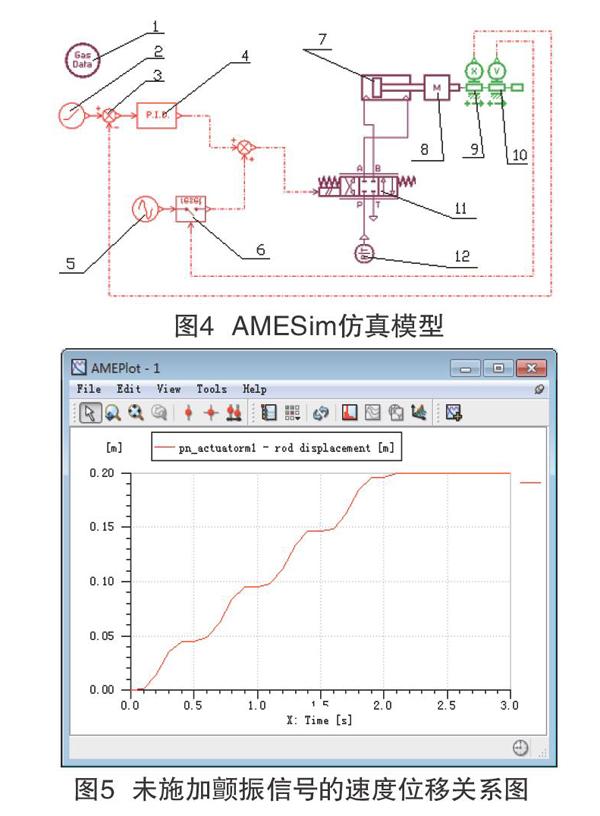
3? AMESim仿真及結(jié)果
圖4是通過AMESim軟件建立的仿真模型圖,1為氣動(dòng)庫;2為斜坡信號(hào),斜率代表氣缸速度;3為比較點(diǎn);4為PID控制器,其中比例為2000,積分為0,微分為200;5為正弦信號(hào),幅值700,頻率9.4Hz,相位0;6為控制開關(guān),當(dāng)接口2為0,開關(guān)閉合;7為氣缸,動(dòng)摩擦為100,靜摩擦為110,行程為0.2m;8為負(fù)載,總移動(dòng)質(zhì)量為100kg;9為位移傳感器;10為速度傳感器;11為三位四通電磁比例換向閥;12為氣壓源,為6bar。
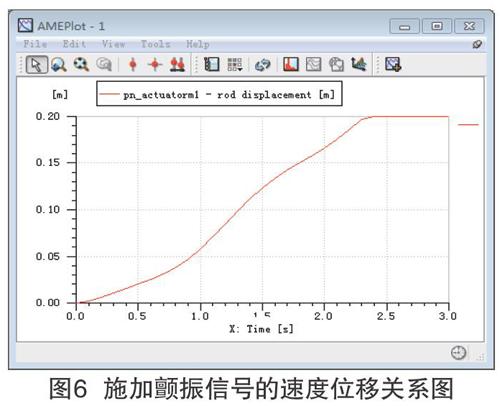
由圖5、圖6仿真結(jié)果顯示氣缸的爬行現(xiàn)象可以通過顫振信號(hào)的疊加來消除,以此證明通過顫振信號(hào)可以有效地消除氣缸的爬行現(xiàn)象。
4? 結(jié)論
該文正是針對(duì)氣缸的摩擦機(jī)理與進(jìn)行研究分析,來設(shè)計(jì)一個(gè)基于正弦信號(hào)的顫振補(bǔ)償?shù)臍鈩?dòng)控制系統(tǒng)。筆者主要完成了以下工作。
(1)詳細(xì)了解了氣缸的發(fā)展趨勢(shì)和現(xiàn)狀以及氣缸的摩擦特性模型。
(2)詳細(xì)了解了爬行現(xiàn)象的成因,并基于此建立了模型。了解了顫振補(bǔ)償?shù)睦碚撘罁?jù),并建立了顫振補(bǔ)償?shù)目刂品娇驁D。使用AMESim軟件建立了氣動(dòng)模型,并進(jìn)行了仿真補(bǔ)償,證明其可行性。
參考文獻(xiàn)
[1] 趙秀華.疊加顫振信號(hào)的氣動(dòng)比例位置控制系統(tǒng)的研究[D].山東大學(xué),2004.
[2] 孟德遠(yuǎn).高精度氣動(dòng)同步系統(tǒng)研究[D].浙江大學(xué),2013.
[3] 崔宗偉.氣缸低速摩擦力特性的研究及其建模與仿真[D].哈爾濱工業(yè)大學(xué),2008.
[4] 謝祖剛.氣缸低速摩擦特性的研究[D].浙江大學(xué),2003.
