位置協助的無人機毫米波通信網絡自適應信道估計
2020-06-19 08:49:06何爾利紀澎善賈向東牛春雨
計算機工程 2020年6期
何爾利,紀澎善,賈向東,2,牛春雨
(1.西北師范大學 計算機科學與工程學院,蘭州 730070; 2.南京郵電大學 江蘇省無線通信重點實驗室,南京 210003)
0 概述
毫米波(millimeter-Wave,mmWave)通信具有豐富的頻譜資源,是5G通信中的關鍵技術之一,而無人機(Unmanned Aerial Vehicle,UAV)協助的無線通信可以達到更高的系統容量、更長的通信距離以及更大的覆蓋范圍,是5G技術的另一個重要應用領域[1-2]。無人機具有高機動性、靈活性和易于部署的特點,已被廣泛應用于各種場景,如作為空中基站為地面用戶提供服務、在緊急情況下提供網絡覆蓋等[3-4]。結合無人機的毫米波通信網絡可以實現高數據傳輸速率,可提供更加靈活的網絡覆蓋。然而,毫米波通信中存在嚴重的路徑損耗,為了彌補這一不足,需要通過天線陣列形成窄帶定向波束和較高天線陣列增益來補償損耗[5]。
當無人機被作為空中用戶設備時,上行鏈路傳輸需要更高的寬帶才能上傳采集到的數據信息[6]。為了更好地支持無人機上行鏈路通信并獲得更高的功率增益,需要通過天線陣列和窄帶波束相互導向[7],自適應地調整天線輻射模式,形成針對無人機的特定天線波束,以增強信號接收能力。因此,研究人員提出在BS和UAV兩端的角域中搜索波束最佳方向的問題。
為解決波束追蹤及對準問題,研究人員針對自適應波束成形及信道估計方案做了大量研究。文獻[8-9]提出多階段自適應毫米波信道估計方法,在發射端和接收端實現了高天線增益。文獻[10]提出一種以用戶為中心的分布式毫米波蜂窩小區基站與波束的自適應選擇算法,以保證用戶服務質量,但該算法只適用于靜態節點。文獻[11]研究了車聯網環境下先驗信息協助的信道估計方法,但其只限于二維場景中,沒有考慮到無人機作為空中用戶在三維場景中的位置運動模型。文獻[12]提出一種基于波束模式的毫米波通信系統波束追蹤算法,利用波束輻射模式的變化估計到達角,實現了波束的精準對準。文獻[13]為滿足無人機實時波束匹配需求,研究了基于傅里葉變換的碼本設計方法,有效提高了波束搜索效率。
上述研究方法均假定初始信道信息已知,但由于無人機網絡的機動性較高,其運動場景為三維模型且位置信息等參數未知。因此,需要進一步研究無人機系統專用信道估計方法。文獻[14]對無人機毫米波網絡的研究現狀和面臨的挑戰進行分析,以實現無人機快速波束追蹤為目標,提出使用側面信息輔助波束追蹤過程的設想。文獻[15]基于波束空間多輸入多輸出系統,提出一種利用無人機移動特性的波束選擇方法以最大化速率和能量效率,并構建了無人機基站和地面用戶位置模型。
在文獻[14-15]的基礎上,本文構建一個單無人機用戶毫米波通信網絡模型,提出基于位置信息協助的無人機毫米波通信網絡BS-UAV信道估計方法。通過UAV與基站三維位置模型獲取先備BS和UAV位置信息,以輔助信道估計過程,提高天線增益并縮短信道估計時間。
1 系統模型

(1)
基站ULA的發射角(Angle of Departure,AOD)為φ∈[0,π),其陣列響應如下:
(2)
基站和無人機之間的信道為窄帶毫米波LOS信道,H為MBS×MUAV的矩陣,則單徑信道幾何模型如下:
(3)

基站使用波束成形向量fp,p=1,2,…,MBS;UAV使用測量向量wq,q=1,2,…,MUAV。由文獻[18]可知,若采用塊衰落信道模型,則UAV處的接收信號y可表示為:
(4)

UAV處的接收信號的矩陣表示為:
(5)

2 位置信息協助信道估計
2.1 無人機位置模型
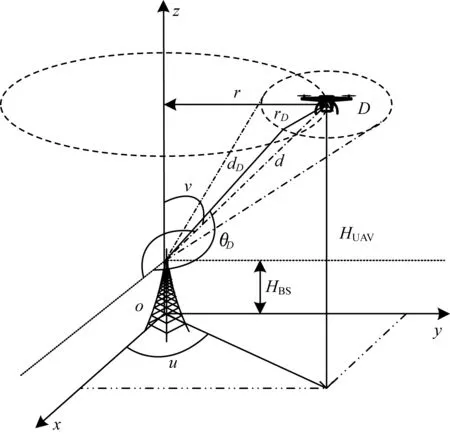
圖1 無人機位置模型示意圖
假設u和v分別為LOS路徑的仰角和方位角。由三角形幾何理論[19]可得:
(6)
其中,ΔH為UAV和BS的高度差,由式(6)及幾何理論可進一步得到如下公式:
cosθ=sinvcosu
(7)
假設無人機的位置信息為距離地面基站dD的圓形區域D,其半徑為rD,則區域D中的一點可以表示為(xD,yD,HUAV)。由式(6)和式(7)可得:
(8)
UAV的先備AOA和AOD區域即為UAV的先備位置信息,利用先備信息可排除部分不正確的AOA和AOD信息。在此基礎上,mmWave基站可以將波束調整到所需方向,為信道估計過程提供輔助。由以上公式推導過程以及圖1位置模型可得UAV先驗的AOA和AOD區域,則位置區域D先備的AOA和AOD信息可表示為:
(9)
(10)
其中,θ∈Rθi,φ∈Rφi。
2.2 自適應信道估計及碼本設計
無人機毫米波通信網絡的特點在于無人機在空中的反射通常比地面上移動用戶周圍的反射要少得多。不同的多徑分量在無人機一側有非常接近的轉向角,整個信道在角度域中較為稀疏[20]。因此,基于壓縮感知的自適應信道估計方法對于無人機mmWave系統較為適用。在無人機毫米波通信系統模型中,通常采用發射端的K個波束成形向量和接收端的K個測量向量組成的組合權重向量來估計信道[8],并將自適應信道估計過程劃分為k個階段,在第k個階段可供選擇的導向向量數為Kk,如圖2所示。
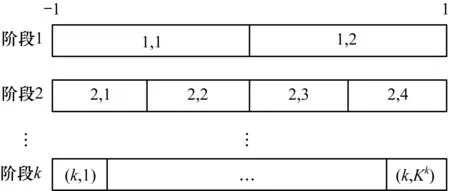
圖2 多階段自適應信道估計示意圖
碼本的設計是為了在數據傳輸前加速波束搜索過程,基于設計好的碼本可以為波束成形過程找到最佳的導向向量。相較于窮舉搜索的方式,分層搜索波束最佳方向的復雜度低、性能更佳,因此被廣泛采用。本文基于文獻[21]所提出的分層多分辨率碼本設計方案設計波束成形向量,并采用空間頻率相同的方案,具體如下:
(11)
其中,n=1,2,…,Kk,arccosRk∈[0,π],空間頻率范圍為(-1,1)。在波束寬度越窄的方向,獲得的波束成形增益越高。
2.3 位置信息輔助信道估計方法
準確的波束方向估計對于波束形成算法獲得最佳的天線增益具有重要作用。由于非理想信道條件會導致波束方向估計不準確,傳統的波束形成算法存在嚴重的性能退化問題,而側面信息可以從另一角度提升信道估計過程性能,因此本文提出一種融合信道信息與無人機位置信息的方法來精確估計其角度范圍。使用來自全球導航衛星系統(Global Navigation Satellite System,GNSS)的無人機先備位置信息提升自適應毫米波信道估計性能,無人機的位置信息直接通過GNSS或由宏基站提供給mmWave基站,以實現快速波束掃描過程。
利用無人機位置信息可以預先推導出視距路徑的AOA和AOD,其范圍定義如下:
(12)
(13)
其中,為φ∈Rφii,θ∈Rθii。結合式(9)和式(10),即可得到在毫米波基站先備的AOA和AOD輔助信道估計信息。
令p(k)和q(k)分別為波束成形向量和測量向量的索引。在k階段,由兩者組成的向量對為(p(k),q(k))。在信道估計過程中,如果接收信噪比(Signal-to-Noise Ratio,SNR)最大,則該導向向量對被選取并估計到正確的AOA和AOD范圍的概率可表示為:
P(p(k),q(k))=
(14)

(15)
(16)
令f(x)為式(14)的概率密度函數,其計算過程如下:
(17)
由貝葉斯理論可知:
P(p(k),q(k))=
(18)
(19)

(20)
在信道估計完成后,期望接收信噪比為:
(21)
另一個量化性能指標為信道估計時間,當無位置信息輔助時,平均信道估計時間計算公式如下:
T=k(K2-1)
(22)
在位置信息輔助方法下,平均信道估計時間為:
T(θ,φ)=
(23)
3 仿真分析
為研究位置信息對信道估計性能的影響,對本文位置信息輔助的無人機毫米波網絡信道估計方法進行仿真。如圖1所示,假設基站位置確定,無人機位置不確定,位置信息區域D半徑rD的大小分別代表不同精度的位置信息,分別在無位置信息、有位置信息(粗定位、精定位)的情況下對接收信噪比和平均信道估計時間進行比較。同時,選取不同發射角度進行仿真分析,其他仿真參數設置如表1所示。

表1 仿真參數設置
圖3給出在不同AOD大小的情況下,無位置信息輔助方法與本文所提出的位置信息輔助信道估計方法接收信噪比的對比。從圖3可以看出,隨著無人機與基站之間距離增大,接收信噪比總體呈下降趨勢,且AOD=25°時的接收信噪比整體高于AOD=75°的接收信噪比。當無人機與基站之間距離為25 m~75 m時,有無位置信息對接收信噪比的影響不大。這是因為當無人機與基站之間距離較近時,接收功率足夠大,位置信息對天線陣列增益影響較小,但兩者間距大于75 m時,有位置信息輔助的接收信噪比明顯高于無位置信息的方法,且AOD的大小變化不會對上述結論造成影響,即從天線增益的角度來看,有位置信息方法可獲得更高的天線增益。同時,如圖3中放大區域所示,在有位置信息輔助的情況下,精定位位置信息比粗定位位置信息輔助策略性能好,且位置信息精確程度越高,接收信噪比越大,位置信息輔助方法的性能越好。
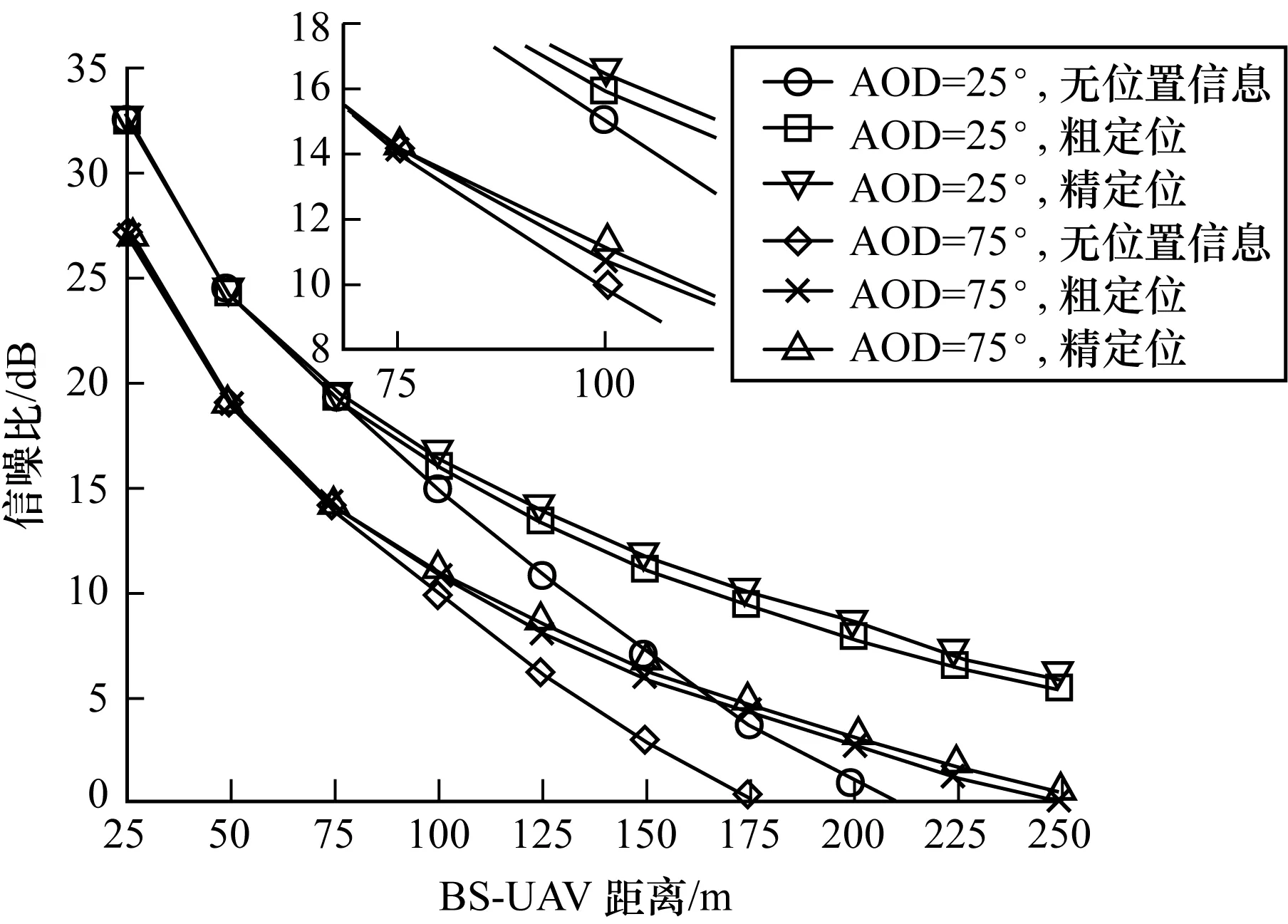
圖3 不同位置信息下接收信噪比對比
圖4給出不同AOD大小情況下,位置信息輔助方法與本文方法的平均信道估計時間對比。從圖4可以看出,在無位置信息情況下,信道估計所用時間最多且不隨距離變化。在位置信息輔助下,平均信道估計時間大幅減少,隨著無人機與基站距離的增加,位置信息輔助策略下平均信道估計時間縮短。這是因為位置信息使得要進行波束掃描的角域范圍變窄,從而找到最佳發射波束所需的時間縮短。
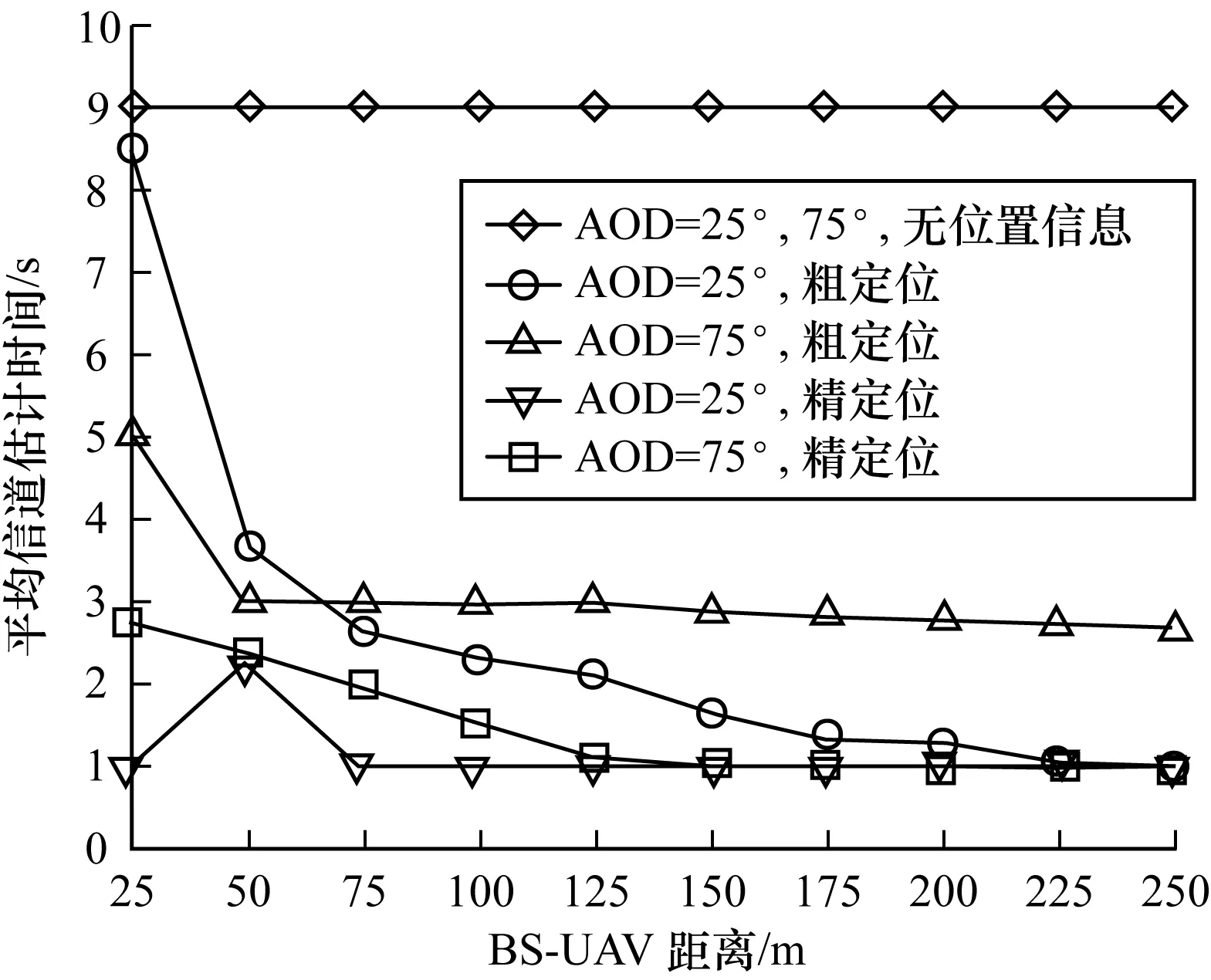
圖4 不同位置信息下平均信道估計時間對比
此外,位置信息輔助信道估計方法還可適應AOD的變化,對于不同大小的AOD,本文方法所用平均信道估計時間更少。位置信息精度提升可進一步優化平均信道估計時間,在精定位位置信息輔助情況下,毫米波基站可以在極短的時間內將波束調整到所需方向。
4 結束語
本文提出一種位置信息輔助的基站與無人機毫米波信道估計方法。構建三維無人機位置模型,在此基礎上,利用位置信息將波束調整到所需方向以輔助信道估計。仿真結果表明,該方法可實現較高的天線增益并縮短信道估計時間。下一步將通過建立無人機航行軌跡三維動態模型設計無人機毫米波網絡的三維波束成形方法。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
祝您健康(1987年2期)1987-12-30 09:52:28