灰色關聯(lián)理論下的移動機器人故障診斷方法研究
2020-06-19 07:51:31蔣文萍閔軍吳其鑫汪晹
現(xiàn)代電子技術 2020年12期
蔣文萍 閔軍 吳其鑫 汪晹
摘 ?要: 隨著計算機理論、電子信息技術、自動控制理論、機械自動化等學科的發(fā)展和新型材料的應用,移動機器人技術突飛猛進,對移動機器人進行故障診斷具有重要意義。首先,通過拆解移動機器人的硬件,了解移動機器人各個模塊的工作原理并分析其可能出現(xiàn)的故障;接著,對故障狀態(tài)下的數(shù)據(jù)和正常運行狀態(tài)下的數(shù)據(jù)進行分析比較,利用灰色關聯(lián)理論診斷故障;最后,利用Matlab仿真對故障診斷方法進行驗證。仿真實驗和實物試驗證明,該方法具有良好的效果。
關鍵詞: 故障診斷; 移動機器人; 灰色關聯(lián)理論; 數(shù)據(jù)分析; Matlab仿真; 測試分析
中圖分類號: TN820.4?34; TP305 ? ? ? ? ? ? ? ? 文獻標識碼: A ? ? ? ? ? ? ? ? ? ? ?文章編號: 1004?373X(2020)12?0165?05
Abstract: With the development of computer theory, electronic information technology, automatic control theory and mechanical automation and the application of the new materials, mobile robot technology is advancing by leaps and bounds, which has great significant to the fault diagnosis of mobile robot. The working principle of each module of the mobile robot is understood and the possible faults are analyzed by disassembling the hardware of the mobile robot. The data in the fault state and the data in the normal running state are analyzed and compared, and the faults are diagnosed by means of the grey correlation theory. The fault diagnosis method is verified with Matlab simulation. The simulation experiments and physical test show that the method has a certain effect.
Keywords: fault diagnosis; mobile robot; grey relational theory; data analysis; Matlab simulation; testing analysis
0 ?引 ?言
隨著計算機理論、電子信息技術、自動控制理論、機械自動化等學科的發(fā)展和新型材料的應用,移動機器人技術突飛猛進。但是移動機器人如果在帶故障狀態(tài)下運行,一方面會使移動機器人的壽命縮短,另一方面還可能帶來災難性的后果。尤其是在面對未知的、復雜的和多變的實際環(huán)境時,移動機器人避免不了會出現(xiàn)故障。因此,對于移動機器人進行故障診斷具有重要意義。在機器人故障診斷技術中,王秀青等提出基于多傳感器信息融合的機器人故障診斷法,利用多傳感器信息融合方法中的融合向量屬性數(shù)量的選擇來進行分析,很好解決機器人在生產(chǎn)線上發(fā)生碰撞干擾的問題,但是前提是需要足夠的傳感器來進行配合使用,信息處理量巨大,需要大量的樣本來訓練機器人,且診斷的對象為工業(yè)機器人這樣活動范圍有限的機器人,對于活動范圍更廣的移動機器人不能做到很好的故障優(yōu)化處理[1]。袁憲鋒等針對輪式機器人建立了多PCA模型及SVM?DS融合決策機器人故障診斷方法[2]。使用PCA來進行正常轉(zhuǎn)態(tài)下的故障診斷,隨后基于混淆矩陣來定義SVM的全局和局部可信度,融合DS理論來進行結(jié)合診斷,進一步降低了機器人行駛中的故障率。但是,這一理論卻無法排除機器人由自身系統(tǒng)和硬件故障引起的問題,無法追蹤行駛過程中由于機器人內(nèi)部電路故障所引起的行駛軌道偏離問題,且診斷方法過分依賴于硬件的配合,特殊性較強,通用性較弱。這里在之前的研究基礎上,引用了相關領域的分析方法,對未知環(huán)境下的移動機器人故障診斷進行了深入的研究,歸納出了基于移動機器人的故障樹;并利用灰色關聯(lián)理論對移動機器人進行故障診斷。仿真實驗和實物試驗證明該方法具有良好的效果[3]。
1 ?移動機器人硬件介紹
實驗選用的移動機器人為上海合時智能科技有限公司設計制造的uAgent?ERS3機器人,其電源模塊采用1.2 V電壓的鎳氫電池,容量為2 000 mA·h,通過串聯(lián)10節(jié)電池來組成12 V穩(wěn)壓電源。穩(wěn)壓器采用LM2576?12來保證電壓輸出的穩(wěn)定性。
移動機器人運動模塊采用的核心芯片是L298N微控制器,其基于一個16 bit/32 bit ARM7TDMI?S CPU,使用PWM調(diào)制來控制電機轉(zhuǎn)速。LPC23/68是多用途的串行通信應用的理想選擇,具有一個10/100M以太網(wǎng)媒體訪問控制器(MAC),USB全速設備,端點RAM大小為4 KB,4個UART,兩個CAN通道,一個SPI接口,2個同步串行端口(SSP),3個I2C接口和一個I2S接口。這種混合的串行通信接口,一個芯片上的4 MHz內(nèi)部振蕩器,SRAM高達32 KB,16 KB SRAM用于以太網(wǎng),USB和8 KB的SRAM一般用途是,與2 KB電池供電的SRAM一起,使這些設備非常適合于通信網(wǎng)關、協(xié)議轉(zhuǎn)換器。多個32位定時器提高10位ADC、10位DAC、PWM單元、控制單元和多達70個快速GPIO線路12個邊沿或電平觸發(fā)的外部中斷引腳,特別適用于工業(yè)控制和醫(yī)療系統(tǒng)。移動機器人的傳感器模塊分別為:霍爾轉(zhuǎn)速傳感器來作為控制系統(tǒng)中的轉(zhuǎn)速檢測;紅外傳感器SHARP 2Y0A21作為測距單元,測量距離為10~80 cm;ZCC212N?TTL電子羅盤作為轉(zhuǎn)角測量單元;ZF02作為無線通信單元,最大發(fā)射功率為10 mW。
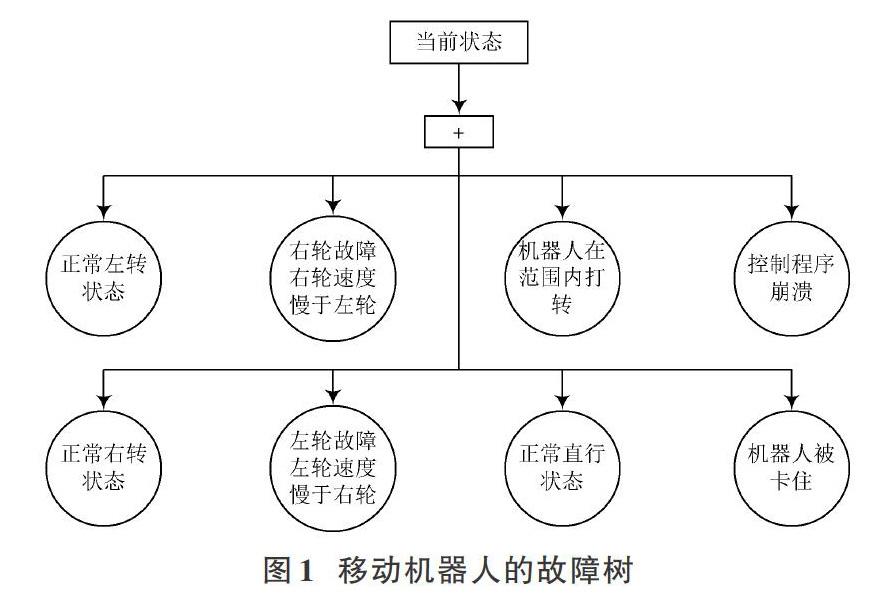
2 ?移動機器人故障樹歸納
經(jīng)過對兩臺相同型號移動機器人的大量試驗,歸納出故障樹如圖1所示。
3 ?基于灰色關聯(lián)的移動機器人故障診斷
3.1 ?診斷思路
兩輛移動機器人中,一輛運行正常,直線運行數(shù)十米,反饋的數(shù)據(jù)無誤,左右輪的轉(zhuǎn)速相等;另一輛在相同程序、相同路面情況下,運動數(shù)秒后出現(xiàn)了明顯的旋轉(zhuǎn),所反饋的數(shù)據(jù)與理想數(shù)據(jù)有很大的偏差,左右輪轉(zhuǎn)速不等,導致移動機器人朝著一個方向偏轉(zhuǎn)。經(jīng)過反復多次的數(shù)據(jù)測量,并不斷改變PWM脈寬調(diào)制的數(shù)值,確定該輛小車發(fā)生了故障。通過反饋數(shù)據(jù)處理和硬件測試兩種方法確定了小車的故障類型[4]。
硬件方面:首先,由于移動機器人是通過供電模塊供電的,考慮到其采用兩種不同電源供電,可能存在電源老化或電池沒有充滿的情況。拆開供電模塊發(fā)現(xiàn),采用同一個鋰電池供電,并且充滿電時,電壓滿值為12.2 V,與理想數(shù)值吻合;在運動模塊的輸入端,輸入電壓并沒有發(fā)生太大的電壓偏差,都是以12 V電壓輸入。
接著,考慮電動機旋轉(zhuǎn)問題或者齒輪比問題。由于電機旋轉(zhuǎn)出錯使得機器人的一個輪子旋轉(zhuǎn)速度較快,一個輪子較慢。互換左右兩個電機并保持原程序不變,獲得的數(shù)據(jù)仍然保持原有情況,故障沒有排除。由此確定不是電機旋轉(zhuǎn)問題。
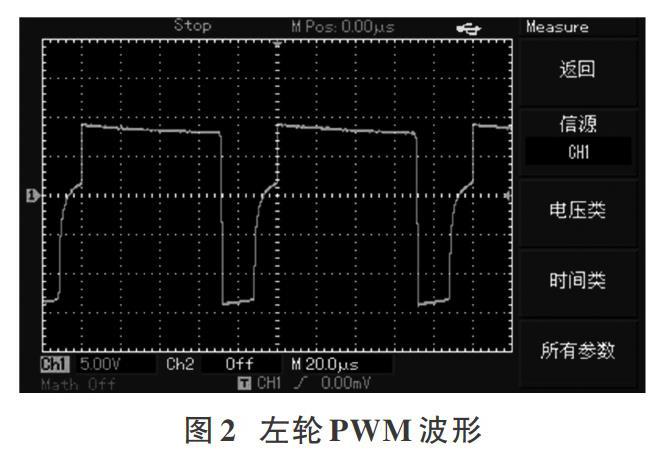
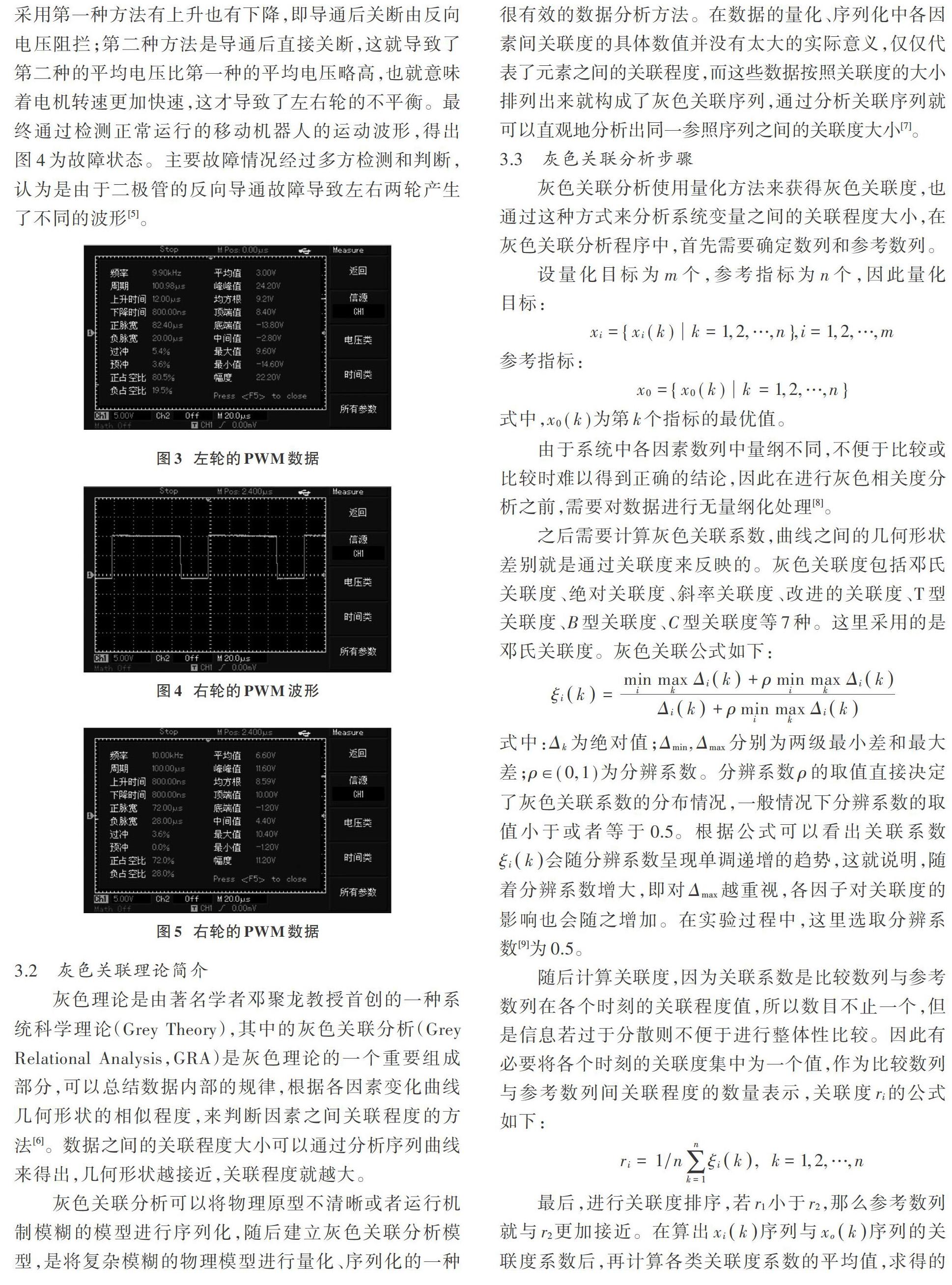
最后,考慮運動模塊故障。由于運動模塊過于龐大,元器件之間已經(jīng)進行了焊接,無法獲取各個電阻、電容、電感的準確數(shù)值,只能通過輸入數(shù)值和輸出數(shù)值判斷故障原因。在輸入中通過萬用表檢查獲取主要芯片的輸入,觀察兩組PWM的輸入是否同步,電壓是否一致,結(jié)果是否一致。之后通過連接電機的5根數(shù)據(jù)線來推測輸出的PWM是否符合設計要求。由于是PWM的方波輸出,需采用示波器進行測量。同時通過萬用表蜂鳴檔獲取電動機正負極與PWM的5根輸出線中的哪兩根相連接。結(jié)果表示:1,2號為霍爾編碼器的電壓輸入,為5 V電壓;3,4號為PWM的輸出波形線;而第5根線為霍爾編碼器的回饋型號,與2號線共地。同時,測量時需要注意帶上負載才有輸出波形。
左右PWM輸入值如圖2~圖5所示。
眾所周知,脈寬調(diào)制是指用改變電機電樞電壓接通與斷開時間的占空比來控制電機轉(zhuǎn)速的方法。當然改變占空比有很多方法,但是最重要的還是改變電壓的平均值。以上讀取到的圖都有可能是正確的。一般而言,采用第一種方法有上升也有下降,即導通后關斷由反向電壓阻攔;第二種方法是導通后直接關斷,這就導致了第二種的平均電壓比第一種的平均電壓略高,也就意味著電機轉(zhuǎn)速更加快速,這才導致了左右輪的不平衡。最終通過檢測正常運行的移動機器人的運動波形,得出圖4為故障狀態(tài)。主要故障情況經(jīng)過多方檢測和判斷,認為是由于二極管的反向?qū)ü收蠈е伦笥覂奢啴a(chǎn)生了不同的波形[5]。
3.2 ?灰色關聯(lián)理論簡介
灰色理論是由著名學者鄧聚龍教授首創(chuàng)的一種系統(tǒng)科學理論(Grey Theory),其中的灰色關聯(lián)分析(Grey Relational Analysis,GRA)是灰色理論的一個重要組成部分,可以總結(jié)數(shù)據(jù)內(nèi)部的規(guī)律,根據(jù)各因素變化曲線幾何形狀的相似程度,來判斷因素之間關聯(lián)程度的方法[6]。數(shù)據(jù)之間的關聯(lián)程度大小可以通過分析序列曲線來得出,幾何形狀越接近,關聯(lián)程度就越大。
灰色關聯(lián)分析可以將物理原型不清晰或者運行機制模糊的模型進行序列化,隨后建立灰色關聯(lián)分析模型,是將復雜模糊的物理模型進行量化、序列化的一種很有效的數(shù)據(jù)分析方法。在數(shù)據(jù)的量化、序列化中各因素間關聯(lián)度的具體數(shù)值并沒有太大的實際意義,僅僅代表了元素之間的關聯(lián)程度,而這些數(shù)據(jù)按照關聯(lián)度的大小排列出來就構成了灰色關聯(lián)序列,通過分析關聯(lián)序列就可以直觀地分析出同一參照序列之間的關聯(lián)度大小[7]。
3.3 ?灰色關聯(lián)分析步驟
灰色關聯(lián)分析使用量化方法來獲得灰色關聯(lián)度,也通過這種方式來分析系統(tǒng)變量之間的關聯(lián)程度大小,在灰色關聯(lián)分析程序中,首先需要確定數(shù)列和參考數(shù)列。
3.4 ?診斷流程
具體的診斷流程如下:首先將故障機器人的當前左右兩輪的轉(zhuǎn)速以2N的矩陣進行輸入,機器人在運行行走的過程中不斷采集數(shù)據(jù),將采集到的數(shù)據(jù)轉(zhuǎn)化為無量綱,繼而獲得各種故障情況下機器人反饋回來的數(shù)據(jù)。再將機器人故障狀態(tài)下反饋回的數(shù)據(jù)與參考數(shù)組的數(shù)據(jù)進行處理,得到兩者的絕對差值,從中選取差值的最小值和最大值。在上述的鄧氏關聯(lián)公式中,設置分辨系數(shù)為0.5,從而可以實時得到各個時間點之間的關聯(lián)系數(shù)。最后比較采取到的各個時間點之間的關聯(lián)系數(shù),獲得最大的關聯(lián)狀態(tài),從而判斷出機器人當前的實時狀態(tài)。機器人故障診斷流程圖如圖6所示。
4 ?故障診斷實驗數(shù)據(jù)及結(jié)果
不走直線時的一種標準故障狀態(tài)數(shù)據(jù)如表1所示。
走直線時的正常數(shù)據(jù)及測試數(shù)據(jù)如表2、表3所示。
由表3的測試數(shù)據(jù)可知,左右兩輪的數(shù)據(jù)是非線性的,與正常直線運動時的狀態(tài)有很大的區(qū)別。因此,需要判斷機器人的故障狀態(tài)。通過采集到的數(shù)據(jù),使用Matlab編程實驗灰色關聯(lián)性判斷。程序中的數(shù)據(jù)經(jīng)過濾波化處理以后,數(shù)據(jù)更加趨于平緩,左右輪的差值更為明顯,可以看出,左右輪保持一個幾乎恒定的差值,如圖7所示。
由此可得結(jié)論,測試狀態(tài)與故障狀態(tài)的關聯(lián)度為0.72,與正常狀態(tài)的關聯(lián)度為0.48。因此,可得結(jié)論,此時移動機器人運動于故障狀態(tài),且故障類型相似于表1給出的一類標準故障狀態(tài)。該故障是由于二極管的反向?qū)ㄒ鹱笥覂奢嗊\動不同步造成的。
5 ?結(jié) ?論
在國內(nèi)外學者對移動機器人故障診斷研究的基礎上,結(jié)合故障樹的基本概念,采用相關領域的基本知識,通過灰色關聯(lián)理論對于不同狀態(tài)下移動機器人故障診斷、故障定位、故障可能性、故障的表現(xiàn)形式等進行了深入研究。主要研究內(nèi)容有拆卸移動機器人的硬件,分析移動機器人的主要硬件結(jié)構和工作原理。通過分析模塊之間的關聯(lián),羅列了所有硬件可能發(fā)生的故障,列舉了移動機器人的不同運動狀態(tài)的故障樹,對于不同狀態(tài)的運行情況進行了說明。通過設計試驗,歸納出移動機器人不走直線的故障原因及故障定位,畫出移動機器人不走直線的故障樹。深入研究灰色理論的基本原理,以及使用灰色關聯(lián)理論對移動機器人故障狀態(tài)和正常狀態(tài)下的數(shù)據(jù)進行了比較和計算,發(fā)現(xiàn)該理論在識別具有時間序列的非線性數(shù)據(jù)的特別有效,并且通過比對不同的關聯(lián)性能夠凸顯出故障數(shù)據(jù)和正常運行下數(shù)據(jù)的不同之處。實踐證明,該方法在識別具有時間序列的非線性數(shù)據(jù)時效果良好。因此,灰色關聯(lián)理論可以成功應用于移動機器人故障診斷領域。可以預見,隨著機器人技術、計算機技術、控制理論、機械工程、電子技術等技術的發(fā)展,該理論也可以應用于機械臂的故障診斷,并進一步應用于未知環(huán)境下移動機械手的故障診斷和容錯控制中,具有很強的適應性與良好的移植性。
參考文獻
[1] 王秀青,侯增廣,曾慧,等.基于多傳感器信息融合的機器人故障診斷[J].上海交通大學學報,2015,49(6):793?798.
[2] 袁憲鋒,宋沐民,周風余,等.多PCA模型及SVM?DS融合決策的服務機器人故障診斷[J].振動、測試與診斷,2015,35(3):434?440.
[3] BIAN X Q, CHEN T, YAN Z P, et al. Fault diagnosis based on grey dynamic prediction for AUV sensor [C]// 2009 IEEE International Conference on Industrial Technology. Gippsland: IEEE, 2009: 934?939.
[4] MONTERIU A, ASTHANA P, VALAVANIS K P, et al. Real?time model?based fault detection and isolation for UGVs [J]. Journal of intelligent & robotic systems, 2009, 56(4): 425?439.
[5] AZZEH M, NEAGU D, COWLING P I. Fuzzy grey relational analysis for software effort estimation [J]. Empirical software engineering, 2010, 15(1): 60?90.
[6] HAMED A, ALINIER G, HASSAN I F. The ECMO specialist's role in troubleshooting ECMO emergencies [J]. Egyptian journal of critical care medicine, 2018, 6(3): 91?93.
[7] HEATON R. Troubleshooting personnel′s satisfaction with software tools [J]. Acquisitions librarian, 2018, 30(3): 119?130.
[8] FLORINE Hindelang, YVES Roggo, RAPHA?L Zurbach. Forensic investigation in the pharmaceutical industry: identification procedure of visible particles in (drug) solutions and different containers by combining vibrational and X?ray spectroscopic techniques [J]. Journal of pharmaceutical and biomedical analysis, 2018(11): 148?153.
[9] HEATON R. Tools for troubleshooting: which ones and what for [J]. Acquisitions librarian, 2018, 30(1): 9?26.
[10] MORTIMORE J M, MINIHAN J M, KESSELMAN M. Essential audits for proactive electronic resources troubleshooting and support [J]. Library hi tech news, 2018, 35(1): 1?17.
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
制造技術與機床(2017年3期)2017-06-23 08:11:21
現(xiàn)代經(jīng)濟信息(2016年19期)2016-10-20 17:46:29
中國科技博覽(2016年18期)2016-10-19 10:30:11
中國市場(2016年36期)2016-10-19 04:31:23
商場現(xiàn)代化(2016年22期)2016-10-18 19:11:00
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
中國海洋大學學報(自然科學版)(2014年7期)2014-02-28 12:21:19
