無(wú)人機(jī)山區(qū)環(huán)境激光掃描路徑規(guī)劃方法研究
2020-07-08 09:24:24周小紅石書山陳科羽
激光技術(shù) 2020年4期
彭 赤,楊 磊,周小紅,石書山,陳科羽,謝 春
(1.貴州電網(wǎng)有限責(zé)任公司生產(chǎn)技術(shù)部,貴陽(yáng)550002;2.貴州電網(wǎng)有限責(zé)任公司 輸電運(yùn)行檢修分公司,貴陽(yáng)550002)
引 言
平原地區(qū)地勢(shì)平坦,各個(gè)桿塔海拔高度相近,可以設(shè)置一等高面進(jìn)行2維路徑規(guī)劃。而山區(qū)環(huán)境地勢(shì)起伏不定,各個(gè)桿塔處于不同海拔高度,無(wú)人機(jī)巡檢路徑應(yīng)為3維路線,故山區(qū)環(huán)境下需要進(jìn)行無(wú)人機(jī)3維路徑規(guī)劃。無(wú)人機(jī)搭載激光傳感器掃描獲得山區(qū)電力走廊空間點(diǎn)云數(shù)據(jù)。在點(diǎn)云數(shù)據(jù)中進(jìn)行快速路徑規(guī)劃,可以保證無(wú)人機(jī)山區(qū)環(huán)境巡檢的安全性與準(zhǔn)確有效性。
本文中主要研究?jī)?nèi)容為基于山區(qū)環(huán)境的無(wú)人機(jī)激光掃描路徑規(guī)劃。研究無(wú)人機(jī)機(jī)載激光傳感器的特性,分析激光傳感器性能參量(包括測(cè)量角度θ、最大測(cè)量距離d等),針對(duì)傳感器特性抽象其測(cè)量模型。通過(guò)輸入桿塔坐標(biāo),結(jié)合激光傳感器特性,規(guī)劃生成最優(yōu)路徑,有效提升飛行效率。
1 國(guó)內(nèi)外現(xiàn)狀
隨著微機(jī)電技術(shù)等相關(guān)技術(shù)的發(fā)展,無(wú)人機(jī)成本顯著降低。20世紀(jì)80年代以來(lái),計(jì)算機(jī)技術(shù)不斷成熟,無(wú)人機(jī)應(yīng)用在西方國(guó)家開(kāi)始普及,例如無(wú)人機(jī)機(jī)載雷達(dá)應(yīng)用[1]、無(wú)人機(jī)托管通信[2]、無(wú)人機(jī)容錯(cuò)控制[3]、無(wú)人機(jī)導(dǎo)航[4]、無(wú)人機(jī)位置自適應(yīng)調(diào)整[5]、無(wú)人機(jī)檢測(cè)[6]、無(wú)人機(jī)系統(tǒng)故障自檢[7]、無(wú)人機(jī)系統(tǒng)識(shí)別[8]、無(wú)人機(jī)搜索救援應(yīng)用[9]等。根據(jù)歐洲無(wú)人機(jī)研究預(yù)測(cè),在未來(lái)30年內(nèi),無(wú)人機(jī)市場(chǎng)將在農(nóng)業(yè)、能源、公共安全/保安、電子商務(wù)/交付、移動(dòng)和運(yùn)輸?shù)阮I(lǐng)域迅猛發(fā)展。例如,在參考文獻(xiàn)[10]中,提出在室外農(nóng)田運(yùn)用無(wú)人機(jī)(unmanned aerial vehicle,UAV),安裝各種傳感器實(shí)現(xiàn)自動(dòng)采集和處理不同的信號(hào)。在參考文獻(xiàn)[11]中,介紹了無(wú)人機(jī)近景攝影的運(yùn)用以及圖像的處理。在參考文獻(xiàn)[12]中,重點(diǎn)研究利用多旋翼無(wú)人機(jī)進(jìn)行基礎(chǔ)設(shè)施檢測(cè)的問(wèn)題。
無(wú)人機(jī)路徑規(guī)劃問(wèn)題是無(wú)人機(jī)系統(tǒng)的重要研究應(yīng)用,目標(biāo)是根據(jù)設(shè)定的性能指標(biāo),比如航跡代價(jià)最小原則,即在規(guī)劃空間中搜索出一條符合性能指標(biāo)的最優(yōu)路徑。20世紀(jì)80年代以來(lái),我國(guó)對(duì)無(wú)人機(jī)路徑規(guī)劃開(kāi)展深入研究,如今在無(wú)人機(jī)動(dòng)態(tài)路徑規(guī)劃[13]、無(wú)人機(jī)技術(shù)標(biāo)準(zhǔn)與法律障礙[14]、無(wú)人機(jī)發(fā)展趨勢(shì)[15]、無(wú)人機(jī)測(cè)繪應(yīng)用[16]、無(wú)人機(jī)輸電線路巡檢應(yīng)用[17]、無(wú)人機(jī)3維航跡規(guī)劃研究[18]、無(wú)人機(jī)軍事與民用領(lǐng)域應(yīng)用[19]、無(wú)人機(jī)系統(tǒng)研究[20]等領(lǐng)域取得一定突破。南京航空航天大學(xué)的HU博士對(duì)無(wú)人機(jī)靜態(tài)航跡規(guī)劃、突發(fā)威脅下航跡規(guī)劃、無(wú)人機(jī)多機(jī)協(xié)同航跡規(guī)劃及航跡平滑等關(guān)鍵技術(shù)做了較深入的研究[21]。西北工業(yè)大學(xué)的BA博士對(duì)航空數(shù)字地圖及在線實(shí)時(shí)路徑規(guī)劃算法,在線突然威脅回避等領(lǐng)域進(jìn)行了研究探索[22]。華北電力大學(xué)的YANG教授對(duì)有障礙物的2維簡(jiǎn)單環(huán)境、3維復(fù)雜環(huán)境兩種情況下的電力桿塔巡檢規(guī)劃問(wèn)題進(jìn)行了深入探討[23]。隨著任務(wù)復(fù)雜度不斷增加,我國(guó)路徑規(guī)劃技術(shù)向智能化的、可實(shí)時(shí)在線優(yōu)化的方向發(fā)展,進(jìn)一步縮小與國(guó)外先進(jìn)水平的差距。
2 飛行環(huán)境的空間約束模型
如圖1所示,設(shè)置桿塔塔高為h,無(wú)人機(jī)飛行高度hw,傳感器測(cè)量最大測(cè)量距離為d,安全冗余距離為s,傳感器與地面距離dw,無(wú)人機(jī)與桿塔連線水平面上垂直距離為w。為保證無(wú)人機(jī)飛行安全與測(cè)量有效性,應(yīng)該滿足以下約束條件:
Fig.1 Constraint space
飛行約束空間并不是靜態(tài)的,而是隨著無(wú)人機(jī)與山區(qū)環(huán)境的相對(duì)高度而變化。飛行約束環(huán)境核心是求取出無(wú)人機(jī)在此位置下與山區(qū)環(huán)境地面的相對(duì)高度,進(jìn)而利用上述公式求取飛行約束環(huán)境。為了保證無(wú)人機(jī)飛行軌跡穩(wěn)定,本文中設(shè)置多旋翼無(wú)人機(jī)飛行相對(duì)高度穩(wěn)定為hw。
約束空間建模核心在于使無(wú)人機(jī)激光掃描區(qū)域與桿塔檢測(cè)區(qū)域相重合,需要考慮測(cè)量距離、飛行高度、橫向距離等因素,構(gòu)建優(yōu)化約束條件如前面所示。其中測(cè)量地面目標(biāo)最大距離dw限定小于傳感器測(cè)量最大有效距離d,保證激光掃描能夠收集到地面信息。無(wú)人機(jī)相對(duì)飛行高度hw保持定值,避免無(wú)人機(jī)飛行過(guò)低撞上桿塔的情況。無(wú)人機(jī)橫向距離w小于當(dāng)前飛行高度對(duì)應(yīng)的最大橫向距離,限制無(wú)人機(jī)飛行的偏移量以優(yōu)化路徑航程大小。
3 無(wú)人機(jī)山區(qū)環(huán)境激光掃描路徑規(guī)劃
3.1 激光傳感器特性
激光傳感器的測(cè)量角度范圍、測(cè)量距離、激光波長(zhǎng)等參量的不同,無(wú)人機(jī)搭載激光傳感器的測(cè)量范圍與效果也不同[24],存在一個(gè)有效測(cè)量區(qū)間。進(jìn)行無(wú)人機(jī)激光掃描路徑規(guī)劃,需要保證激光傳感器有效測(cè)量區(qū)間與電力走廊空間相重合。因此,本文中研究激光傳感器最大測(cè)量距離d與測(cè)量角度θ等特性,定義無(wú)人機(jī)與垂直距離w、無(wú)人機(jī)測(cè)量桿塔的最大距離R作為規(guī)劃路徑限制指標(biāo)(如圖2所示)。
Fig.2 Effective measurement interval of the laser sensor
傳感器最大測(cè)量距離d限制無(wú)人機(jī)與桿塔的垂直距離 w的范圍。本文中設(shè)置(Sx,Sy),(Gx,Gy),(Nx,Ny)分別為兩個(gè)桿塔和無(wú)人機(jī)的xy軸坐標(biāo)。如圖3所示,首先求取無(wú)人機(jī)與兩個(gè)桿塔之間的水平面上的距離l1,l2,以及兩個(gè)桿塔之間的距離l3。利用3個(gè)邊的關(guān)系可以求得無(wú)人機(jī)與兩個(gè)桿塔連線的垂直距離w:
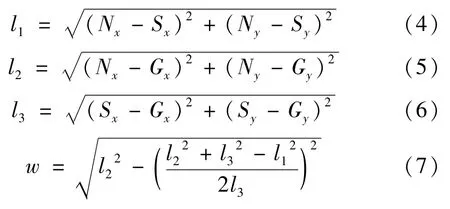
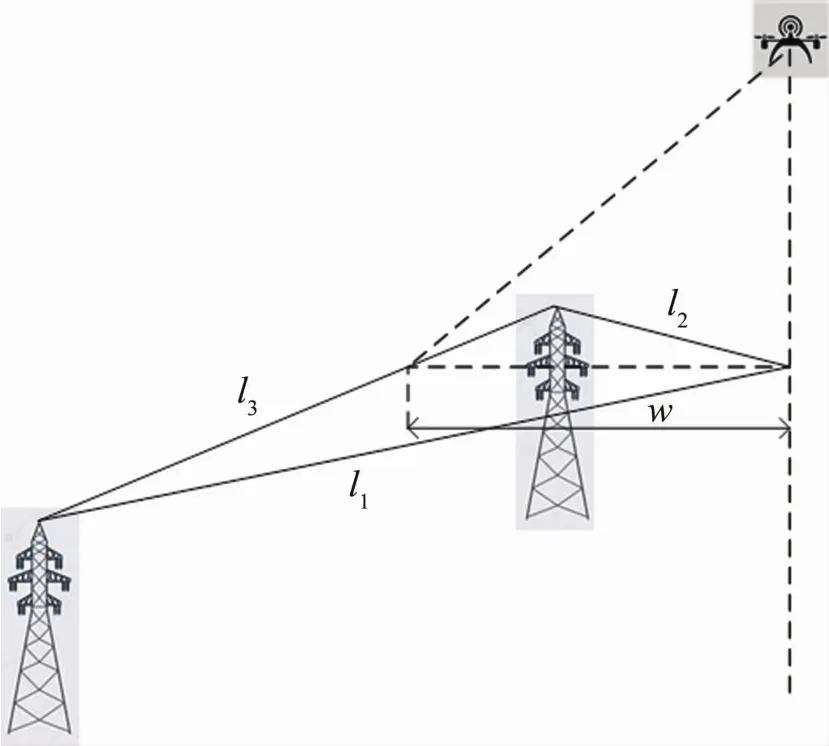
Fig.3 Horizontal distance
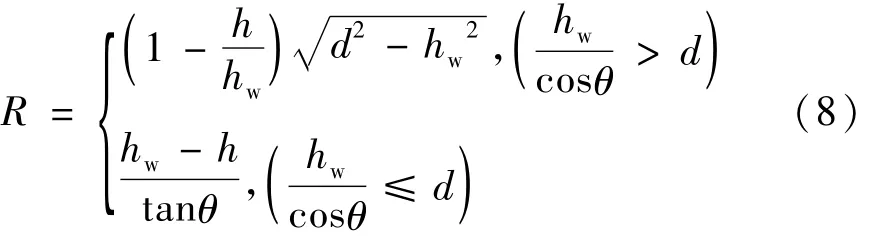
傳感器測(cè)量角度θ與最大測(cè)量距離d限制無(wú)人機(jī)測(cè)量桿塔的最大距離R的大小,如圖4所示。設(shè)置無(wú)人機(jī)飛行高度為hw、無(wú)人機(jī)測(cè)量桿塔的最大距離R與傳感器測(cè)量角度θ、最大測(cè)量距離d關(guān)系如下:
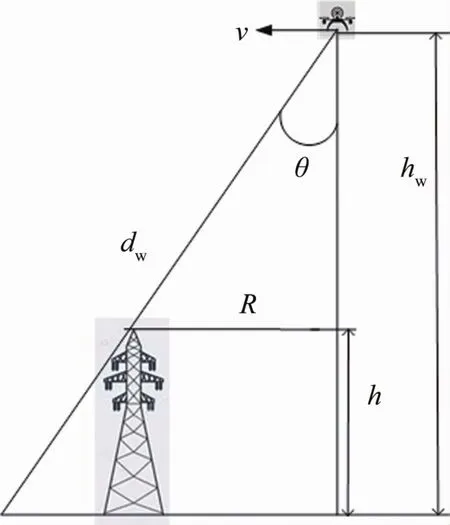
Fig.4 Maximum distance
將無(wú)人機(jī)測(cè)量桿塔的最大距離R作為電線桿塔吸引域的半徑,無(wú)人機(jī)到達(dá)吸引域中任意一點(diǎn)均可保證桿塔檢測(cè)有效性,如圖5所示。
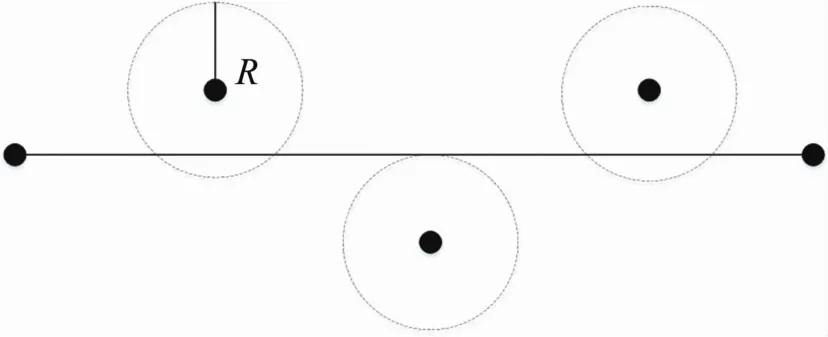
Fig.5 Attraction domain of pole tower
本文中研究 Velodyne VLP-16,RS-LiDAR-16,HDL-32E 3種激光傳感器的特性,進(jìn)行路徑規(guī)劃。激光傳感器如圖6所示,相關(guān)參量如表1所示。
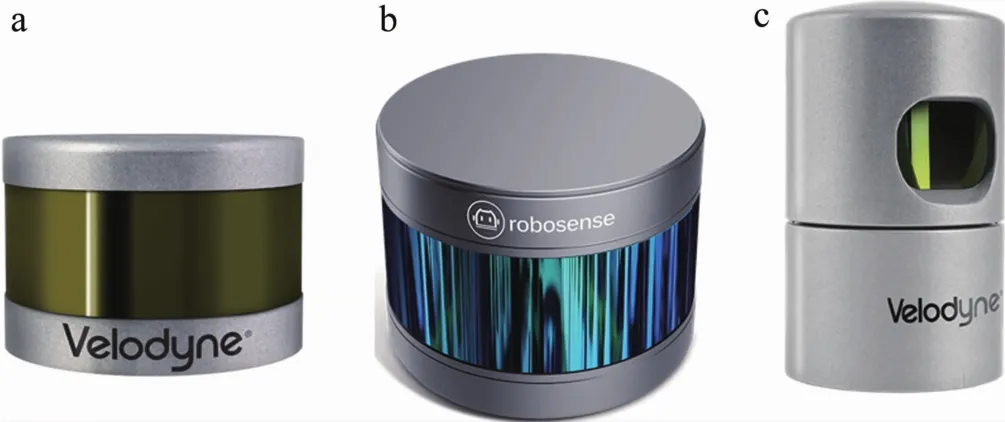
Fig.6 Three kinds of laser sensorsa—Velodyne VLP-16 b—RS-LiDAR-16 c—HDL-32E

Table 1 Laser sensor parameters
3.2 航程約束
無(wú)人機(jī)路徑規(guī)劃需要考慮無(wú)人機(jī)的飛行航程問(wèn)題。為保證無(wú)人機(jī)安全執(zhí)行巡檢任務(wù),無(wú)人機(jī)需要在一定時(shí)間內(nèi)完成任務(wù)并返航。定義最大航程lmax,進(jìn)行無(wú)人機(jī)路徑規(guī)劃時(shí)計(jì)算前往下一個(gè)目標(biāo)點(diǎn)并開(kāi)始返航的航程是否超限。如果超限,規(guī)劃無(wú)人機(jī)從此刻目標(biāo)點(diǎn)立即返航,否則繼續(xù)規(guī)劃前往下一個(gè)目標(biāo)點(diǎn)[25]。規(guī)劃軌跡li與最大航程關(guān)系如下所示:
式中,(xi,yi,zi)為當(dāng)前無(wú)人機(jī)位置坐標(biāo),(xs,ys,zs)為無(wú)人機(jī)路徑規(guī)劃起始點(diǎn)。
3.3 路徑代價(jià)函數(shù)
路徑代價(jià)函數(shù)是無(wú)人機(jī)路徑規(guī)劃的重要評(píng)價(jià)指標(biāo),作用是保證無(wú)人機(jī)飛行的高效性與安全性。無(wú)人機(jī)飛行路徑代價(jià)與航跡長(zhǎng)度、終點(diǎn)距離兩個(gè)因素相關(guān)聯(lián)。進(jìn)行無(wú)人機(jī)路徑規(guī)劃,既要考慮航跡長(zhǎng)度大小,也要考慮與終點(diǎn)距離因素。
設(shè)置第i段無(wú)人機(jī)飛行路徑代價(jià)函數(shù)如下所示:

式中,∑li表示從起始點(diǎn)到第i個(gè)位置點(diǎn)的所有軌跡段長(zhǎng)度之和;lgoal表示第i個(gè)位置點(diǎn)到終點(diǎn)的距離;k為權(quán)重系數(shù),在(0,1)范圍內(nèi)。
3.4 規(guī)劃算法
結(jié)合激光傳感器特性,使用DIJKSTRA算法與人工勢(shì)場(chǎng)法混合算法進(jìn)行路徑規(guī)劃。DIJKSTRA算法進(jìn)行全局規(guī)劃,從起始點(diǎn)出發(fā),逐步生成下一個(gè)轉(zhuǎn)移點(diǎn)直至終點(diǎn),保證路徑經(jīng)過(guò)所有桿塔目標(biāo)點(diǎn)。同時(shí)使用人工勢(shì)場(chǎng)法進(jìn)行局部?jī)?yōu)化,計(jì)算桿塔對(duì)無(wú)人機(jī)的引力作用調(diào)整規(guī)劃路徑。規(guī)劃流程如下所示:(1)加載桿塔目標(biāo)點(diǎn)位置與環(huán)境信息,對(duì)山區(qū)環(huán)境離散化;(2)使用DIJKSTRA算法進(jìn)行全局路徑規(guī)劃,綜合考慮代價(jià)函數(shù)最小原則以及無(wú)人機(jī)與桿塔的垂直距離w的限制;(3)使用人工勢(shì)場(chǎng)法按桿塔先后順序進(jìn)行局部?jī)?yōu)化,計(jì)算桿塔吸引域內(nèi)吸引力最小的點(diǎn)作為新的目標(biāo)點(diǎn);(4)再次使用DIJKSTRA算法進(jìn)行全局路徑規(guī)劃,更新規(guī)劃路徑;(5)判斷是否優(yōu)化完所有桿塔目標(biāo)點(diǎn),若未完成則返回第(2)步;(6)輸出最優(yōu)規(guī)劃路徑。
4 實(shí)驗(yàn)驗(yàn)證
在MATLAB平臺(tái)上進(jìn)行實(shí)驗(yàn),驗(yàn)證結(jié)合傳感器測(cè)量特性的路徑規(guī)劃方法的有效性與正確性。將實(shí)驗(yàn)分為無(wú)人機(jī)不結(jié)合傳感器測(cè)量特性的路徑規(guī)劃、無(wú)人機(jī)結(jié)合Velodyne VLP-16激光傳感器特性的路徑規(guī)劃、無(wú)人機(jī)結(jié)合RS-LiDAR-16激光傳感器特性的路徑規(guī)劃、無(wú)人機(jī)結(jié)合HDL-32E激光傳感器特性的路徑規(guī)劃4種情況,實(shí)驗(yàn)硬件條件為:Intel i5-7200U CPU與4.00GB RAM。
無(wú)人機(jī)不結(jié)合傳感器測(cè)量特性進(jìn)行路徑規(guī)劃,規(guī)劃路徑總長(zhǎng)度lall=570.9212m,規(guī)劃路徑如圖7所示。
Velodyne VLP-16激光傳感器最大測(cè)量距離d=100m,最大測(cè)量角度 θ=15°,規(guī)劃路徑總長(zhǎng)度 lall=527.6188m,規(guī)劃路徑如圖8所示。
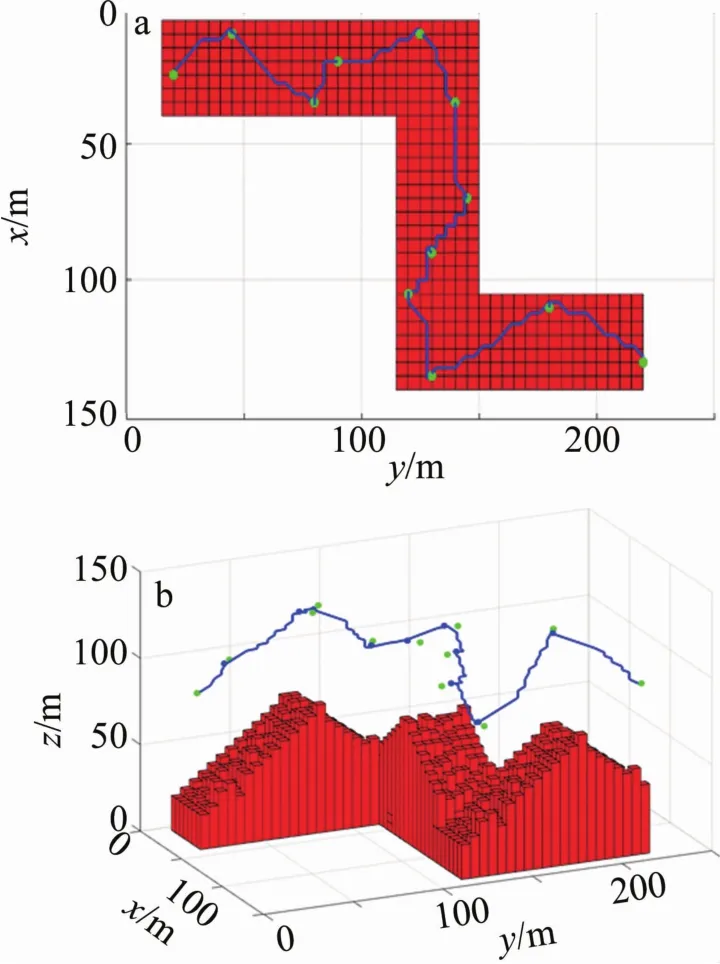
Fig.7 Planned path without sensora—top vie—side view
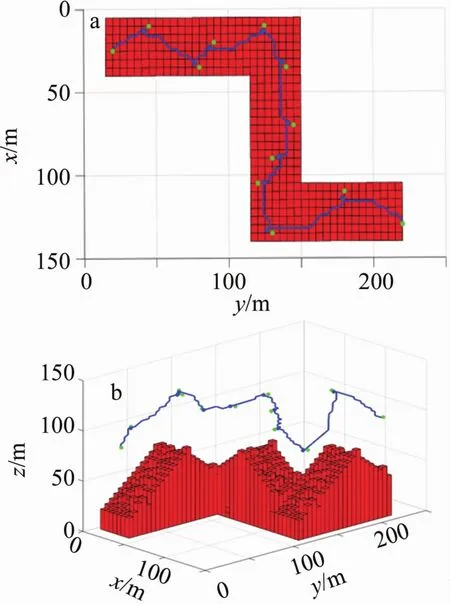
Fig.8 Planned path with Velodyne VLP-16 sensora—top vie—side view
RS-LiDAR-16激光傳感器最大測(cè)量距離 d=150m,最大測(cè)量角度θ=15°,規(guī)劃路徑總長(zhǎng)度 lall=507.0738m,規(guī)劃路徑如圖9所示。
HDL-32E激光傳感器最大測(cè)量距離d=100m,最大測(cè)量角度θ=30°,規(guī)劃路徑總長(zhǎng)度lall=494.8212m,規(guī)劃路徑如圖10所示。
4種情況實(shí)驗(yàn)結(jié)果如圖11所示。
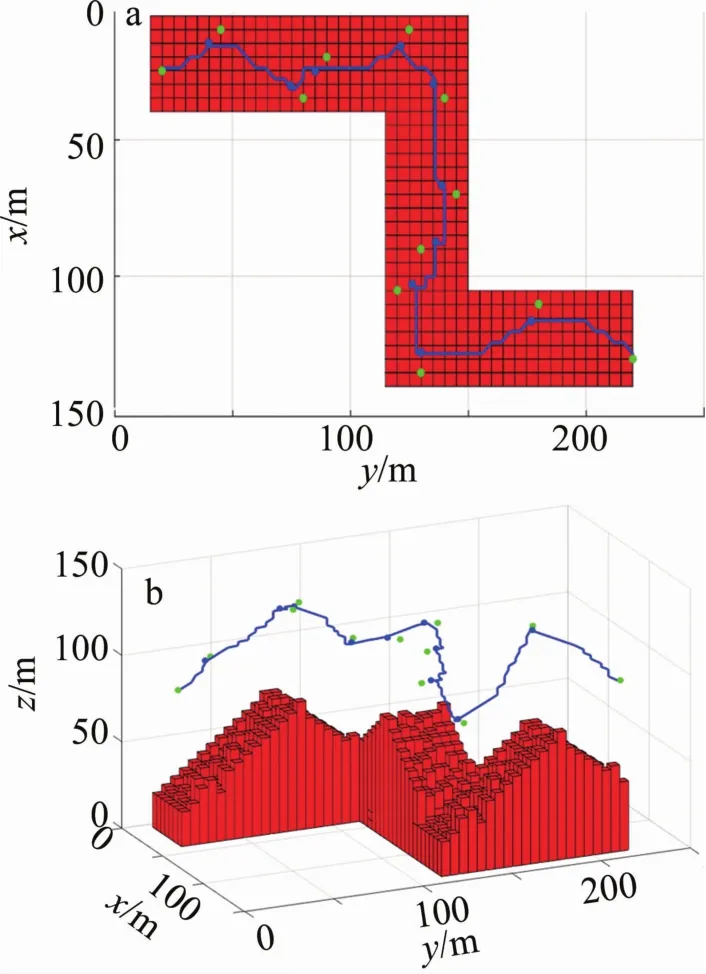
Fig.9 Planned path with RS-LiDAR-16 sensora—top vie—side view
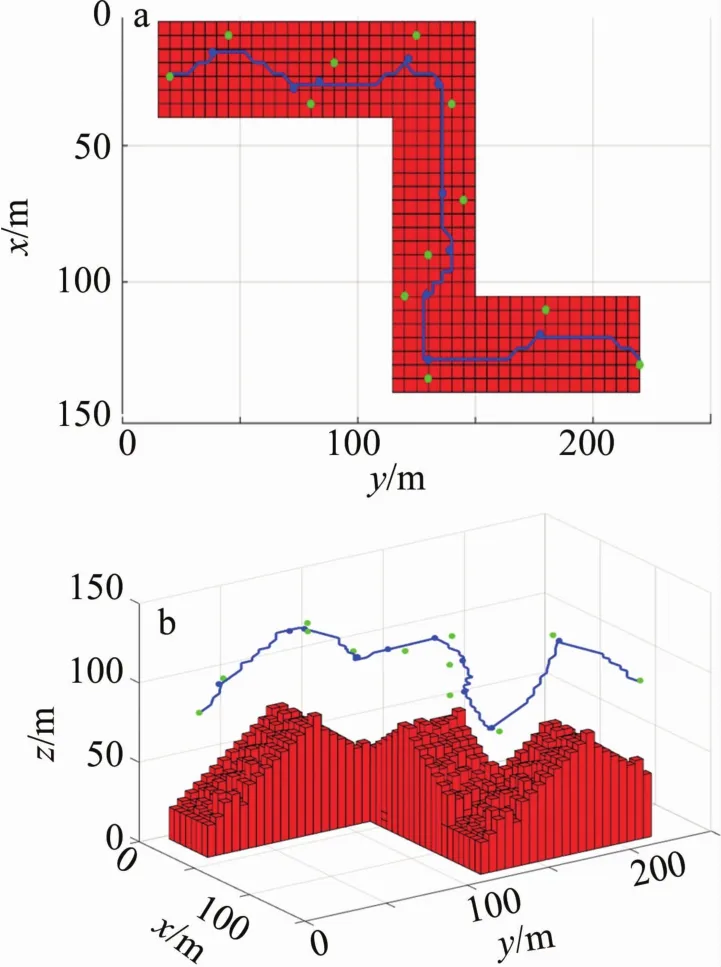
Fig.10 Planned path with HDL-32E sensora—top vie—side view
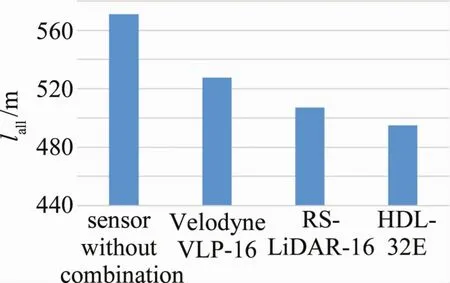
Fig.11 Results of the experiment
由此可知,與未結(jié)合傳感器特性的規(guī)劃路徑長(zhǎng)度相比較,結(jié)合Velodyne VLP-16激光傳感器測(cè)量特性的規(guī)劃路徑長(zhǎng)度減少優(yōu)化了7.58%;結(jié)合RS-LiDAR-16激光傳感器測(cè)量特性的規(guī)劃路徑優(yōu)化長(zhǎng)度減少了11.18%;結(jié)合HDL-32E激光傳感器測(cè)量特性的規(guī)劃路徑優(yōu)化長(zhǎng)度減少了13.33%;驗(yàn)證了山區(qū)激光掃描路徑規(guī)劃方法的有效性和正確性。
5 結(jié) 論
實(shí)現(xiàn)了一種結(jié)合傳感器測(cè)量特性的路徑規(guī)劃方法。由實(shí)驗(yàn)驗(yàn)證可得:結(jié)合Velodyne VLP-16,RS-Li-DAR-16,HDL-32E 3種激光傳感器的最大測(cè)量距離d以及測(cè)量角度θ等特性進(jìn)行路徑規(guī)劃,規(guī)劃優(yōu)化效果分別達(dá)到了7.58%,11.18%,13.33%。在山區(qū)環(huán)境中,根據(jù)桿塔之間豎直方向的相對(duì)位置關(guān)系,結(jié)合傳感器測(cè)量特性,對(duì)桿塔目標(biāo)點(diǎn)的高度改變?chǔ),規(guī)劃路徑的長(zhǎng)度發(fā)生明顯變化。因此,為了進(jìn)一步提高規(guī)劃優(yōu)化效果,后續(xù)可加入桿塔目標(biāo)點(diǎn)高度變化Δh的影響,將桿塔吸引域優(yōu)化為3維球狀吸引域,從而對(duì)桿塔目標(biāo)點(diǎn)進(jìn)行3維空間內(nèi)的位置優(yōu)化,進(jìn)一步縮短規(guī)劃路徑長(zhǎng)度,提高飛行的效率。
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國(guó)傳媒大學(xué)學(xué)報(bào)(自然科學(xué)版)(2021年1期)2021-06-09 08:43:00
中國(guó)生殖健康(2020年6期)2020-02-01 06:28:50
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中國(guó)生殖健康(2019年11期)2019-01-07 01:28:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國(guó)衛(wèi)生(2016年2期)2016-11-12 13:22:16