復(fù)雜環(huán)境中電力線激光點云的自動提取
2020-07-08 09:24:42劉海燕丁高峰
激光技術(shù) 2020年4期
關(guān)鍵詞:方法
吳 華,劉海燕,丁高峰,曹 飛
(1.華北電力大學(xué)控制與計算機(jī)工程學(xué)院,北京102206;2.北京中飛艾維航空科技有限公司,北京102600)
引 言
隨著智能電網(wǎng)建設(shè)的大規(guī)模開展,輸電通道高精度、自動化的空間結(jié)構(gòu)分析需求逐年增加。輸電線作為輸電通道的主要設(shè)備,承擔(dān)著輸送電力的重要角色。輸電線安全是電力系統(tǒng)穩(wěn)定運(yùn)行的重要保障[1]。但是電力線往往處于復(fù)雜的外部環(huán)境中,靠近電力線生長的樹木、建筑等會對其安全構(gòu)成潛在威脅[2-3]。因此,如何從復(fù)雜環(huán)境中高效、科學(xué)地提取出電力線,對于后續(xù)分析走廊設(shè)備的空間關(guān)系十分重要[4-7]。
目前,主流的電力線提取方法通常包括地物點剔除和單條電力線提取兩步。
(1)剔除地物點的方法主要有:基于電力線分布對地有一定高差的特點,使用高程閾值分割算法剔除地物點[8],但該算法只適用于平坦的地形;為了適應(yīng)地形起伏變化,SHEN等人提出了將長距離輸電線路劃分為多個小距離空間,再利用高程閾值分割算法分離地物點[9],該方法雖然解決了地形起伏的影響,但難以確定準(zhǔn)確的高程閾值;YU等人利用不規(guī)則三角網(wǎng)加密(triangulated irregular network,TIN)的濾波方法先剔除地面點,然后采用基于角度的濾波方法剔除植被點[10],該方法能濾除大量高空中的植被點,但計算量較大且容易受到參量閾值的影響。
(2)對于單條電力線提取方法的研究,其中一種主流方法是根據(jù)電力線在xOy面的線性特征,使用Hough變換在2維空間提取電力線[10-15],該方法可以很好地分離同層且具有一定間距的電力線,但無法對垂直排列的多條電力線進(jìn)行分割;另一種主流方法是使用監(jiān)督分類的方法分離出電力線[16-19],其中McLAUGHLIN提出了使用局部仿射模型算法來提取電力線[16],該方法的初始模型非常重要,直接影響到提取精度;SOHN等人提出使用馬爾可夫隨機(jī)場分類器來分離電力線和建筑物[18],該方法需要大量的訓(xùn)練樣本才能達(dá)到預(yù)期的效果,同時采樣不均勻也會提高錯誤分類率。
基于以上問題,本文中在電力線空間分布特征的基礎(chǔ)上,提出了一種適應(yīng)復(fù)雜環(huán)境的電力線自動提取方法。首先,綜合考慮地形起伏、干擾植被點的影響,以空間網(wǎng)格劃分為基礎(chǔ),采用自頂向下的濾波方法剔除地物點,并利用密度描述子分離線塔點。其次,利用半徑搜索法提取出單條電力線。最后,對涵蓋不同地形及不同塔型的數(shù)據(jù)進(jìn)行電力線提取實驗,驗證了本文中方法的有效性和準(zhǔn)確性,總提取精度高達(dá)99.69%。
1 復(fù)雜環(huán)境中的線物塔分離方法
由機(jī)載激光雷達(dá)(light detection and ranging,LiDAR)掃描獲得的輸電走廊數(shù)據(jù)除了電力線點云數(shù)據(jù)外,還包含大量的地物點和電塔點,因此在提取電力線之前,要對原始點云數(shù)據(jù)進(jìn)行預(yù)處理。本文中在考慮地形起伏變化以及地物點分布異常的復(fù)雜環(huán)境下,基于空間網(wǎng)格劃分法,對網(wǎng)格采用自頂向下的方法分離地物點,并利用密度描述子分離電塔點,實現(xiàn)復(fù)雜環(huán)境下電力線提取的預(yù)處理。預(yù)處理流程如圖1所示。
1.1 基于空間網(wǎng)格化的自頂向下地物點云分割
激光雷達(dá)掃描獲取的數(shù)據(jù)中常見的地物點包括地面點、建筑物點、植被點等。對于地勢起伏變化較大的輸電線路,常常會出現(xiàn)低地勢的電力點和高地勢的地物點在高度上重疊的現(xiàn)象。但是若將長距離輸電線路劃分成多個空間網(wǎng)格,則每個網(wǎng)格近似于平坦地面的點云分布,于是可以對每個網(wǎng)格進(jìn)行處理并有效解決地勢起伏帶來的問題。此外,由于地物點分布無序、雜亂,而高空中的電力點云受地物點影響較小。結(jié)合這些特點,本文中提出基于空間網(wǎng)格化的自頂向下方法來剔除地物點。具體實現(xiàn)方法如下。
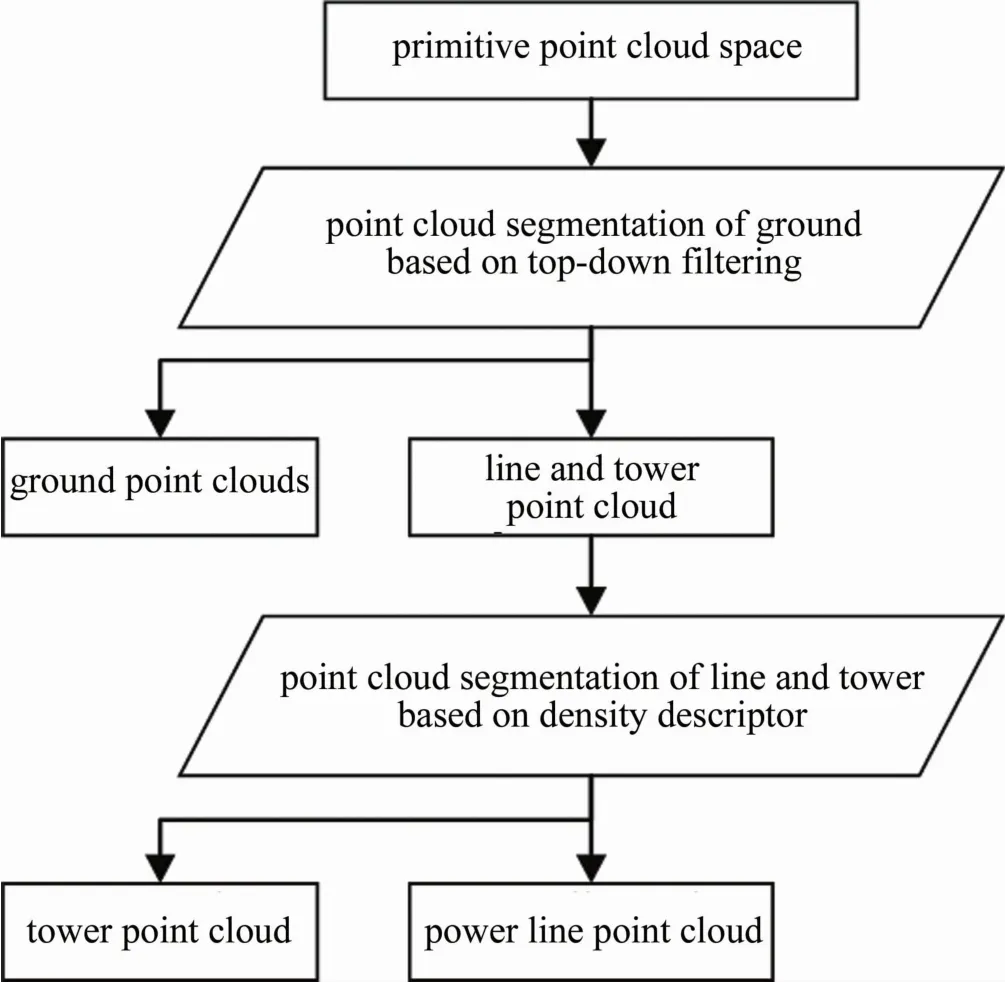
Fig.1 Flow chart of power line extraction
(1)利用主成分分析法[20]計算輸電線路走向:建立點云數(shù)據(jù)的協(xié)方差矩陣,矩陣中最大特征值對應(yīng)的特征向量就表示點云主方向,即輸電線路走向,設(shè)其為x軸方向。
(2)空間網(wǎng)格劃分:設(shè)置沿x軸的劃分尺度為dx,將原始點云空間S0沿x軸劃分為n個空間網(wǎng)格Si(i=1,2,3,…,n),其中 n和 Si定義為:
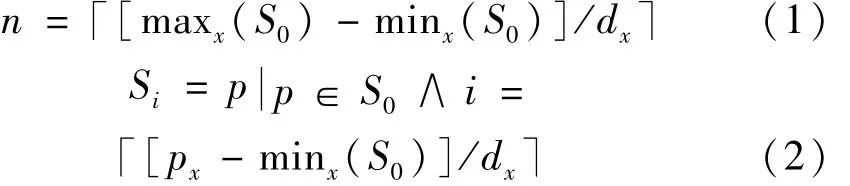
式中,maxx(S0)和 minx(S0)分別表示原始點云空間 S0在x軸上的最大和最小的x坐標(biāo)值,px表示S0中任意點p的x軸坐標(biāo)值,i表示沿著x軸劃分的空間網(wǎng)格的序號,┌ ┐表示向上取整。
(3)單元格劃分:沿著z軸以dz為劃分尺度,將第i個空間網(wǎng)格沿 z軸劃分為 mi(i=1,2,3,…,n)個單元格,表示為 Si,j(i=1,2,3,…,n;j=1,2,3,…,mi):
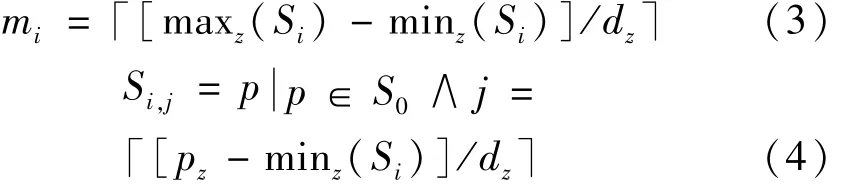
式中,maxz(Si)和 minz(Si)分別表示第 i個空間網(wǎng)格沿 z軸最大和最小的z坐標(biāo)值,j表示沿著z軸劃分的子空間的序號。原始點云空間網(wǎng)格劃分過程如圖2所示。
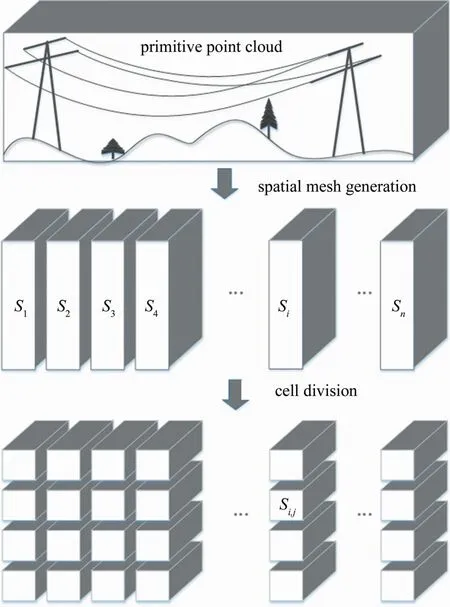
Fig.2 Spatial grid generation of original point clouds
(4)使用自頂向下搜索算法剔除地物點:對每個空間網(wǎng)格 Si(i=1,2,3,…,n)進(jìn)行處理。由于輸電走廊寬度與電塔橫擔(dān)寬度相近,因此通過不同塔型的大致寬度,設(shè)置橫向電力線初始間距為d,結(jié)合地物點所在平面寬度陡然變化的特點,將地物點所在平面之上的最大和最小的y坐標(biāo)值確定為邊界值ymax和ymin,通過刪除邊界值之外的點云實現(xiàn)大量地物點的剔除;然后結(jié)合點云投影在xOz面電力線的條數(shù)nline,對處理后的空間網(wǎng)格自頂向下進(jìn)行搜索,當(dāng)搜索到的電力線條數(shù)等于輸入的電力線條數(shù)nline時,對應(yīng)搜索完成的高度k即為切割閾值,刪除高度k以下的點云,實現(xiàn)電力線垂直距離下的地物點的剔除。最終完成對每個空間網(wǎng)格內(nèi)地物點的剔除。具體算法過程如表1所示。
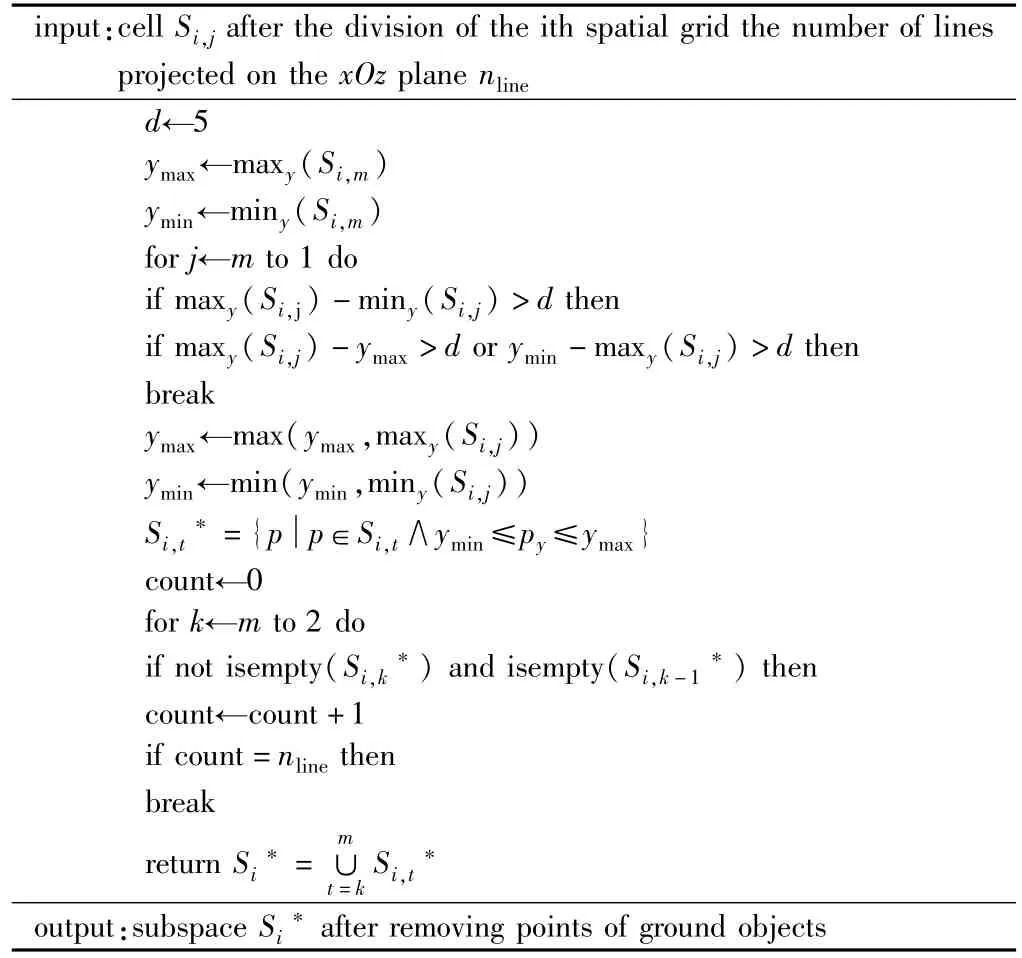
Table 1 Algorithms for eliminating object points in spatial grids
1.2 基于密度描述子的線塔點云分割
經(jīng)上述算法處理后,僅保留下了線塔點云以及少量高空噪聲點云,其中噪聲點云通常為高空飛點,并不影響后續(xù)電力線的提取。為了實現(xiàn)多個桿塔間電力線的自動提取,接下來需將桿塔點云剔除。利用電塔點云密度大,相鄰電力線點云密度較小的特點,通過點云密度統(tǒng)計法分割電塔,具體實現(xiàn)過程如下。
對剔除地物點后的空間網(wǎng)格 Si*(i=1,2,3,…,n)進(jìn)行分割:沿著y軸以dy為劃分尺度,沿y軸將空間網(wǎng)格分割為mi個單元格,每個單元格表示為Si,j*(i=1,2,3,…,n;j=1,2,3,…,mi):
式中,maxy(Si*)和miny(Si*)分別表示第i個空間網(wǎng)格沿y軸最大和最小的y坐標(biāo)值。
具體劃分過程如圖3所示。fi,j表示第i個空間網(wǎng)格的第j個子網(wǎng)格中是否有點云。對于第i個空間網(wǎng)格,若單元格內(nèi)有點云,fi,j=1,否則 fi,j=0,于是密度描述子δi表示為:
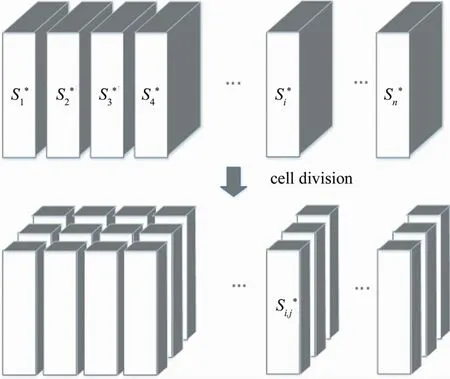
Fig.3 Cell division of point clouds

通過設(shè)定合適的密度描述子閾值即可完整地分割線塔點云,根據(jù)分割出的電塔點云所在位置,即可將多檔點云數(shù)據(jù)劃分為單檔數(shù)據(jù),以便于后續(xù)單條電力線的提取。經(jīng)實驗驗證該方法可以簡單有效地剔除電塔點云。
2 單條電力線提取
原始點云數(shù)據(jù)經(jīng)過預(yù)處理后,保留下了電力線點云數(shù)據(jù)。根據(jù)輸電線路設(shè)計的相關(guān)標(biāo)準(zhǔn)規(guī)范,無論是上下層分布的兩層電力線之間還是同層分布的水平電力線之間,都存在一定的間隔寬度。根據(jù)這個特點,本文中提出通過半徑搜索算法提取出單條電力線。
由于激光雷達(dá)掃描角度或物體對激光吸收程度的影響,導(dǎo)致獲取的電力線點云數(shù)據(jù)可能存在稀疏的現(xiàn)象,這給垂直方向分離單根電力線帶來了困難。此外,電力線具有一定大小的弧垂,即電力線的自重導(dǎo)致的自然下垂,在地勢起伏的地方,單檔距的電力線擁有最小和最大兩個弧垂值,因此,傳統(tǒng)依靠高程閾值分離電力線的方法在地形復(fù)雜的情況下表現(xiàn)遜色,且具體閾值難以確定。基于上述存在的問題,本文中提出了半徑搜索算法來提取單條電力線,算法工作原理如下:(1)確定電力線點云數(shù)據(jù)T中x值最小的點作為初始搜索點p,并設(shè)置搜索半徑r(通常小于上下線間距的2/3);(2)以搜索點 p為中心,r為球體半徑搜索點云,將搜索到的點加入到集合Sc中,剩余點放到集合Rc中,判斷每次是否搜索到新的點,如果搜索到,則更新搜索點p為Sc中x值最大的點;否則,沿著主方向?qū)⑺阉鼽c平移距離 r,生成新的搜索點 p;(3)若 maxx(T)-px<r,則完成一次搜索,提取出一條電力線點云數(shù)據(jù),執(zhí)行步驟(4);否則重復(fù)步驟(2);(4)若 Rc中無點云時,則停止所有搜索;否則在Rc中尋找x值最小的點作為再次搜索的初始搜索點p,重復(fù)步驟(2)和步驟(3)。
3 實驗與分析
為了驗證本文中所提方法在復(fù)雜環(huán)境下的可行性和魯棒性,選取了不同復(fù)雜地形以及包含不同塔型的3組機(jī)載激光點云數(shù)據(jù)進(jìn)行實驗。數(shù)據(jù)1覆蓋面積為1347.50m×280m,包含6221968個3維數(shù)據(jù)點,輸電走廊所處地形凹凸不平,周圍有大量植被干擾,連接電力線的桿塔塔型為羊角塔;數(shù)據(jù)2覆蓋面積為1482.10m×261m,包含3288538個3維數(shù)據(jù)點,輸電走廊所處地形陡然變化,高空中有噪聲點干擾,連接電力線的桿塔塔型為酒杯塔;數(shù)據(jù)3覆蓋面積為625.10m×826.50m,包含7752188個3維數(shù)據(jù)點,輸電走廊所處地形平坦,電力線呈等腰三角形分布,連接電力線的桿塔塔型為貓頭塔。
實驗中涉及的參量主要包括dx,dy以及dz,其中dx主要基于桿塔厚度進(jìn)行設(shè)置,通常為3m~6m;dy和dz是在考慮電力線水平及垂直間隔的基礎(chǔ)上進(jìn)行設(shè)置,通常小于線間距的1/2。本次實驗中設(shè)置dx=4m,dy=dz=1m,從而沿著主方向?qū)?shù)據(jù)1劃分為337個空間網(wǎng)格,數(shù)據(jù)2劃分為374個空間網(wǎng)格,數(shù)據(jù)3劃分為230個空間網(wǎng)格。
3.1 線物塔分割
在對原始點云數(shù)據(jù)進(jìn)行空間網(wǎng)格劃分的基礎(chǔ)上,使用自頂向下濾波算法分割出地物點云數(shù)據(jù)和線塔點云數(shù)據(jù),原始實驗數(shù)據(jù)及分割結(jié)果如圖4和圖5所示。從實驗結(jié)果可見,本文中提出的自頂向下濾波算法對不同復(fù)雜度的地形都有很好的適應(yīng)性,能夠完整地剔除地物點,同時可見,實驗結(jié)果中有部分電塔的基座也被剔除,由于本文中只關(guān)注電力線的提取,因此對電塔的完整性暫時不予考慮。

Fig.4 Experimental data
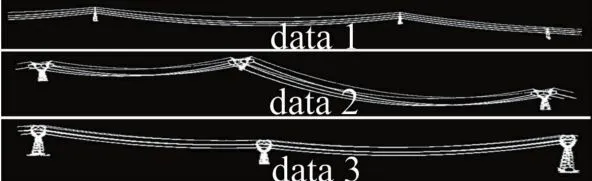
Fig.5 Line and tower point clouds after segmentation
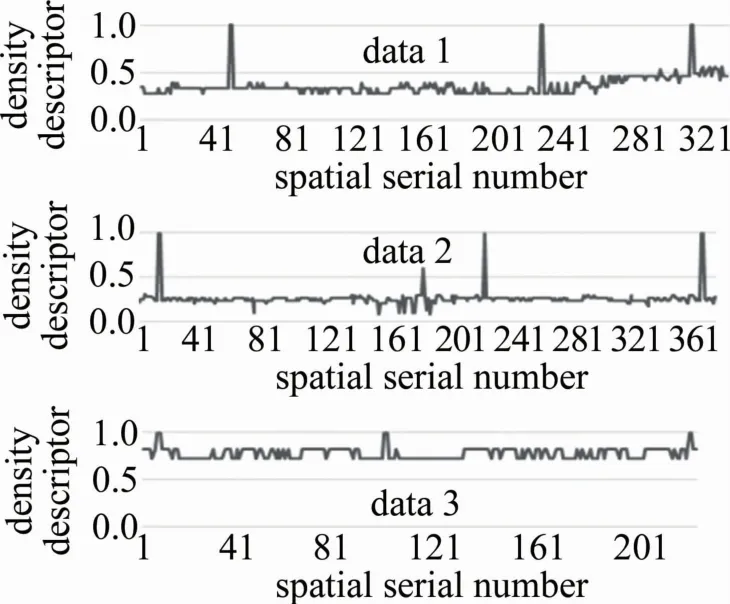
Fig.6 Density descriptor of line and tower point clouds data
接下來,計算剔除地物點后的每個空間網(wǎng)格的密度描述子,將統(tǒng)計結(jié)果用折線圖表示,如圖6所示。從圖中可見,無論輸電走廊所處地形如何變化、包含的桿塔類型如何變化,電塔點所在的空間網(wǎng)格密度描述子均近似于1。因此在分離線塔點云的過程中,將描述子閾值設(shè)置為接近1的值,即可將電力線點云數(shù)據(jù)從線塔點云中分離出來,剔除電塔點后的實驗結(jié)果如圖7所示。
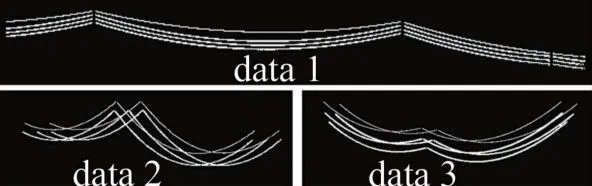
Fig.7 Line point clouds after segmentation
3.2 單條電力線提取實驗
對剔除電塔點云后保留下來的電力線點云,使用半徑搜索算法搜索單條電力線。分別對3組數(shù)據(jù)進(jìn)行實驗,并選取3組數(shù)據(jù)中的任一檔數(shù)據(jù)進(jìn)行結(jié)果展示,對提取出的單條電力線用不同顏色進(jìn)行染色區(qū)分,如圖8所示。可以看出,半徑搜索算法能完整地實現(xiàn)單條電力線的分離。
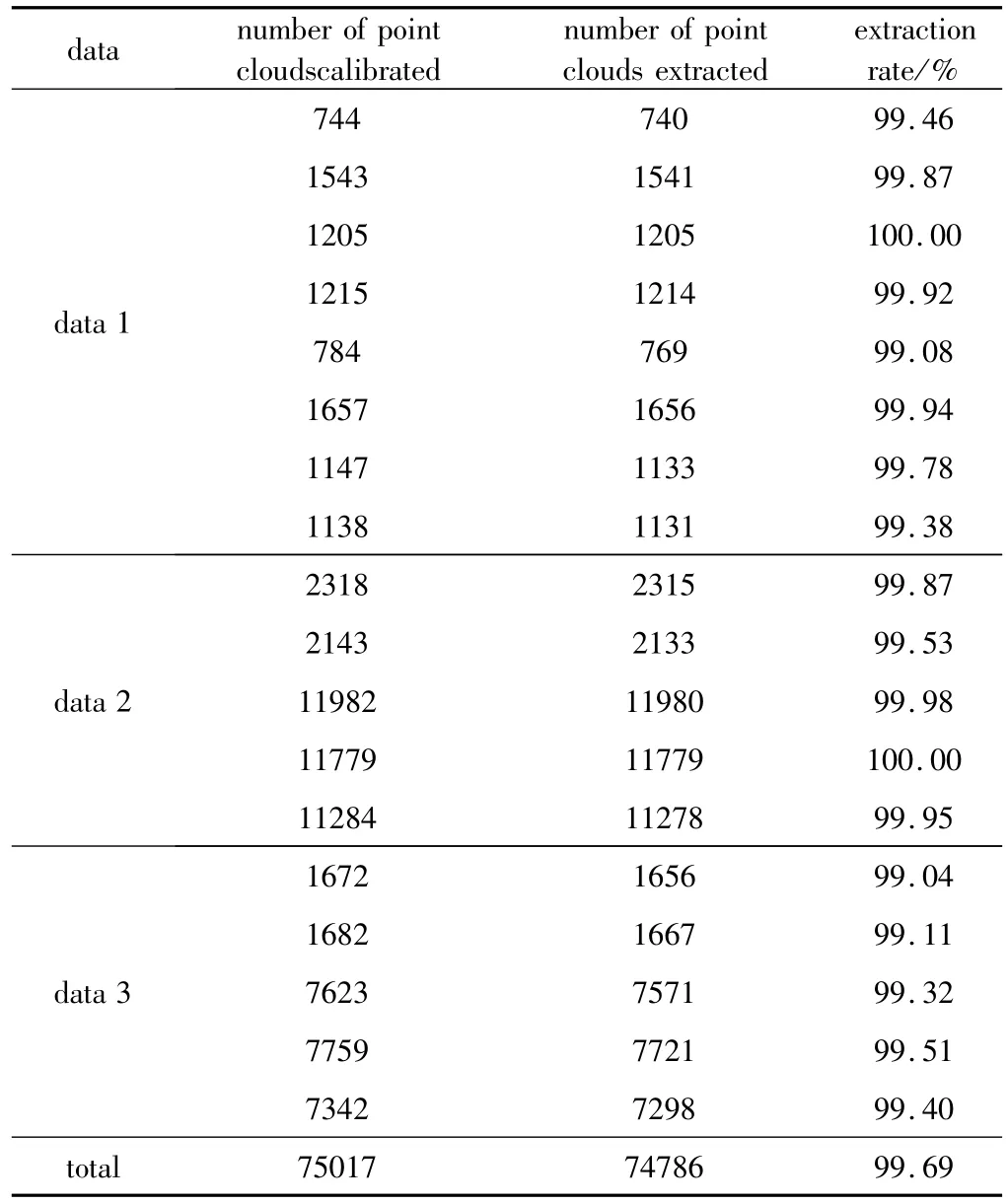
Table 2 Accuracy evaluation of power line extraction
3.3 單條線路提取精度評估
為了驗證單條電力線的提取精度,對以上實驗結(jié)果中的總計18條電力線的提取精度進(jìn)行評估,評估標(biāo)準(zhǔn)是電力線點云提取率(提取率=提取點云數(shù)/標(biāo)定點云數(shù)),統(tǒng)計結(jié)果如表2所示。由表2可知,電力線的總提取精度高達(dá)99.69%。因此,無論是不同塔型連接的電力線點云數(shù)據(jù),還是受地形或植被干擾的點云數(shù)據(jù),本文中提出的電力線提取方法都能適配。
4 結(jié) 論
通過分析塔線物的空間分布特點,運(yùn)用空間網(wǎng)格分割算法,提出了一種從激光雷達(dá)數(shù)據(jù)中自動提取電力線的新方法。在地形起伏變化大、受高植被干擾的復(fù)雜環(huán)境中,該方法可以完整準(zhǔn)確地自動提取出電力線,且對多種塔型連接的輸電走廊均有較好的魯棒性。通過實驗可以發(fā)現(xiàn),所提出的方法有效地解決了復(fù)雜環(huán)境下電力線提取精度低的問題,在輸電走廊的空間結(jié)構(gòu)自動分析領(lǐng)域具有良好的工程應(yīng)用價值。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學(xué)生數(shù)理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56