基于跟蹤特征的目標(biāo)模型逼真度評(píng)估方法
2020-07-08 09:24:44何易德
激光技術(shù) 2020年4期
何易德,朱 斌,王 詢,陳 好,賈 靜
(西南技術(shù)物理研究所,成都610041)
引 言
導(dǎo)引頭半實(shí)物仿真試驗(yàn)要求目標(biāo)/場(chǎng)景模型與真實(shí)目標(biāo)/場(chǎng)景一致,需重點(diǎn)考慮目標(biāo)尺度變化、遮擋、輻射信息等,因此加大了目標(biāo)/場(chǎng)景的紅外建模難度。若在給定的飛行軌跡、目標(biāo)運(yùn)動(dòng)軌跡及復(fù)雜場(chǎng)景條件下,能定性分析和定量計(jì)算紅外目標(biāo)/場(chǎng)景模型的置信度,可逐步實(shí)現(xiàn)半實(shí)物仿真試驗(yàn)替代外場(chǎng)試驗(yàn),從而提高導(dǎo)引頭的研制效率,降低成本,縮短開(kāi)發(fā)周期。高效實(shí)用的紅外目標(biāo)模型評(píng)估方法和相應(yīng)模型數(shù)據(jù)庫(kù)的建立在仿真方面有巨大的意義,是該領(lǐng)域的基礎(chǔ)。
最直觀的方法是考慮場(chǎng)景/目標(biāo)模型與實(shí)際拍攝紅外圖像來(lái)進(jìn)行逐像素評(píng)估,利用統(tǒng)計(jì)分析和行業(yè)專家的主觀經(jīng)驗(yàn)來(lái)估計(jì)模型的逼真度。該方法簡(jiǎn)單可行,但從全局圖像出發(fā),忽略了成像過(guò)程的探測(cè)器光/電效應(yīng)和圖像內(nèi)容,既不能充分說(shuō)明圖像的關(guān)鍵信息(如小目標(biāo)),又增加了目標(biāo)/場(chǎng)景的紅外輻射特性建模難度。不少研究者[1-5]通過(guò)分析半實(shí)物仿真試驗(yàn)中的目標(biāo)模型傳輸流程,從目標(biāo)模擬器方面來(lái)分析目標(biāo)/場(chǎng)景的成像逼真度,但僅從傳輸?shù)挠布胧衷u(píng)估無(wú)法解決模型源的真實(shí)逼真度。TIAN等人[6]提出等效逼真和過(guò)程逼真的概念,即深入分析目標(biāo)模型在給定軌跡條件下與實(shí)際飛行條件中目標(biāo)成像進(jìn)行評(píng)估,對(duì)目標(biāo)形狀等效、面積等效、距離等效、輻射照度等效、輻射對(duì)比度等效指標(biāo)進(jìn)行評(píng)分和綜合,完成目標(biāo)模型逼真度的評(píng)估。該方案符合人眼視覺(jué)和傳統(tǒng)跟蹤算法中的時(shí)域模板匹配,但并不滿足日益發(fā)展的跟蹤需求,特別是初始階段真實(shí)目標(biāo)與偽目標(biāo)并存的情況下,無(wú)法真實(shí)反映紅外目標(biāo)模型內(nèi)在特征。
現(xiàn)有方法沒(méi)有從跟蹤角度來(lái)分析紅外仿真目標(biāo)模型圖像,僅僅從圖像自身進(jìn)行分析,忽略了目標(biāo)模型仿真的實(shí)際意義。鑒于紅外目標(biāo)/場(chǎng)景模型圖像的驗(yàn)證是現(xiàn)階段半實(shí)物仿真試驗(yàn)的難點(diǎn),且現(xiàn)有模型逼真度驗(yàn)證方法的不足,深入分析武器逼近中對(duì)紅外目標(biāo)的跟蹤過(guò)程,在等效逼真原則下,本文中結(jié)合目標(biāo)模型紅外輻射特性建模流程和跟蹤目標(biāo)的關(guān)鍵特征提取算法,提出利用典型常用的跟蹤算法的關(guān)鍵特征來(lái)驗(yàn)證紅外目標(biāo)模型圖像的逼真度,并通過(guò)計(jì)算關(guān)鍵特征的均方差來(lái)量化模型的逼真度。
1 仿真紅外目標(biāo)模型逼真度評(píng)估的前提
評(píng)估紅外仿真目標(biāo)模型的前提是仿真目標(biāo)模型圖像與拍攝目標(biāo)圖像的成像條件一致,本文中采用起始等效逼真和過(guò)程等效逼真的觀念[6],同時(shí)按照紅外仿真建模的條件和流程對(duì)目標(biāo)進(jìn)行建模。
起始等效逼真指末制導(dǎo)階段開(kāi)啟圖像功能并完成目標(biāo)的搜索過(guò)程,將目標(biāo)移至成像視場(chǎng)中心。過(guò)程逼真指跟蹤逼近過(guò)程中,由于跟蹤擾動(dòng)或目標(biāo)運(yùn)動(dòng),成像視點(diǎn)均鎖定目標(biāo),目的始終是將目標(biāo)移至成像中心。起始等效逼真和過(guò)程逼真必須明確此刻的距離、角度、環(huán)境參量以及成像視場(chǎng)、成像分辨率、目標(biāo)固有幾何參量與物理屬性等客觀參量。目標(biāo)固有幾何參量指外觀尺寸大小、部件組成、紋理等信息,物理屬性指各部件的材質(zhì)特性以及局部先驗(yàn)信息,物理屬性與環(huán)境參量、距離、角度同時(shí)決定目標(biāo)的紅外輻射,顯現(xiàn)為目標(biāo)模型的灰度值、對(duì)比度等信息。結(jié)合實(shí)際場(chǎng)景和目標(biāo)信息,基于熱輻射原理,同時(shí)考慮目標(biāo)與場(chǎng)景之間的散射輻射以及大氣傳輸效應(yīng),對(duì)武器成像時(shí)的目標(biāo)進(jìn)行紅外輻射特性建模。在等效逼真的前提下,采用提出的關(guān)鍵特征方法來(lái)評(píng)價(jià)目標(biāo)模型圖像與實(shí)際目標(biāo)圖像之間的逼真度。由于紅外目標(biāo)模擬器對(duì)仿真目標(biāo)模型信息的損失在設(shè)計(jì)時(shí)已固定,已知目標(biāo)模擬器的光學(xué)畸變等誤差上界,故本文中暫不分析目標(biāo)模擬器在仿真目標(biāo)模型逼真度中的作用。
2 模型評(píng)估的詳細(xì)分析與評(píng)判標(biāo)準(zhǔn)設(shè)計(jì)
本文中的核心是通過(guò)分析現(xiàn)有目標(biāo)模型逼真度評(píng)價(jià)方法和目標(biāo)模擬器在目標(biāo)模型中的評(píng)估作用,深入剖析跟蹤對(duì)真實(shí)目標(biāo)紅外輻射特性和目標(biāo)紅外模型的關(guān)鍵特征提取算法,提出在等效逼真和過(guò)程逼真的前提下目標(biāo)輻射特性建模的側(cè)重點(diǎn)應(yīng)該符合實(shí)際跟蹤算法處理的核心內(nèi)容:關(guān)鍵特征,而不是目標(biāo)/場(chǎng)景模型圖像與實(shí)際紅外成像逐像素一致。同時(shí)關(guān)鍵特征應(yīng)從常用典型跟蹤算法入手,不僅僅是傳統(tǒng)的模板匹配跟蹤算法。故目標(biāo)模型逼真度的評(píng)估驗(yàn)證應(yīng)以常用典型跟蹤算法為基準(zhǔn),利用各跟蹤算法提取目標(biāo)模型圖像關(guān)鍵特征描述來(lái)評(píng)估目標(biāo)模型的逼真度;同時(shí)通過(guò)分析大量跟蹤視頻及跟蹤過(guò)程,跟蹤所關(guān)注的重點(diǎn)區(qū)域?yàn)榘繕?biāo)模型的中心區(qū)域,而不是整幅圖像(因?yàn)楝F(xiàn)階段有效的跟蹤算法僅僅能處理目標(biāo)在成像視場(chǎng)內(nèi),對(duì)于目標(biāo)長(zhǎng)期在視場(chǎng)外的情況基本無(wú)法再次捕獲并跟蹤目標(biāo);穩(wěn)定跟蹤過(guò)程中,目標(biāo)位于視場(chǎng)邊緣或突變到視場(chǎng)外的時(shí)間非常短暫)。
在下一節(jié)中,詳細(xì)設(shè)計(jì)所提出的目標(biāo)模型逼真度評(píng)價(jià)方法時(shí),遵循上述初始等效逼真和過(guò)程逼真的原則,詳細(xì)分析常用典型跟蹤的特征提取算法,選擇目標(biāo)紅外輻射特性建模圖像與實(shí)際目標(biāo)輻射圖像來(lái)提取關(guān)鍵特征進(jìn)行描述評(píng)估,分析常用跟蹤算法的特征提取,將特征量化并根據(jù)量化結(jié)果給出模型的逼真度值。
(1)模板匹配的跟蹤算法過(guò)程重點(diǎn)關(guān)注目標(biāo)面積和目標(biāo)量化輻照對(duì)比度兩個(gè)特征。在等效逼真前提下,計(jì)算仿真目標(biāo)模型與拍攝目標(biāo)圖像的面積和輻射對(duì)比度特征均方差的加權(quán)和為:

式中,α1和α2為加權(quán)系數(shù)。
(2)基于關(guān)鍵特征點(diǎn)的跟蹤算法,本文中采用尺度不變特征變換[7-8](scale invariant feature transform,SIFT)特征點(diǎn)提取算法,SIFT算法提取目標(biāo)模型和拍攝目標(biāo)圖像的關(guān)鍵點(diǎn)特征,包括位置、尺度及方向等信息的點(diǎn)特征,利用此不變特征,利用SIFT特征描述子的信息組成(每一特征由128維向量組成)的加權(quán)均方差:

式中,αk為加權(quán)系數(shù),n為相對(duì)應(yīng)的特征點(diǎn)總數(shù),Vs,k(x1,x2,…,x128)為仿真目標(biāo)模型對(duì)應(yīng)的第 k個(gè)特征點(diǎn),每一特征點(diǎn)的描述由128維向量表征,Vk(x1,x2,…,x128)為實(shí)際拍攝目標(biāo)圖像對(duì)應(yīng)的第 k個(gè)特征點(diǎn)。
(3)基于相關(guān)濾波的跟蹤算法,相關(guān)算法分別計(jì)算仿真目標(biāo)模型和拍攝目標(biāo)圖像的最優(yōu)濾波器[9],將計(jì)算得到的兩個(gè)最優(yōu)濾波器(即相關(guān)跟蹤算法的特征)進(jìn)行均方差:

式中,i,j為濾波器大小,Xs,i,j表示目標(biāo)模型圖像最優(yōu)濾波器,Xi,j表示實(shí)際拍攝圖像最優(yōu)濾波器。
(4)基于深度學(xué)習(xí)的跟蹤算法,分別計(jì)算將仿真目標(biāo)模型和拍攝目標(biāo)圖像輸入訓(xùn)練卷積神經(jīng)網(wǎng)絡(luò)[10-13]得到的全連接層中的主要權(quán)系數(shù)(即為此跟蹤算法所關(guān)注的特征)的加權(quán)均方差為:

式中,n表示神經(jīng)網(wǎng)絡(luò)全連接層的主要特征數(shù),αk為相應(yīng)的加權(quán)系數(shù),i,j為相應(yīng)特征的大小,Xs,k,i,j表示目標(biāo)模型圖像的第k個(gè)特征,Xk,i,j表示實(shí)際拍攝圖像的第k個(gè)特征。
未來(lái)脊髓成像方法的發(fā)展需要MRI設(shè)備制造商和軟件開(kāi)發(fā)工程師進(jìn)行不間斷的更深層次溝通,以使方法和技術(shù)共享。未來(lái)發(fā)展的方向?yàn)榇龠M(jìn)方法和數(shù)據(jù)的廣泛共享,如可以為脊髓成像軟件和方法建立一個(gè)自由訪問(wèn)的方法庫(kù),可以用于共享脊髓成像數(shù)據(jù)。專門討論脊髓成像方面的成果和新進(jìn)展,使更多研究人員能參與,彌補(bǔ)相互不足而促進(jìn)更快的發(fā)展。因此,在我們對(duì)脊髓損傷的病理生理學(xué)的詳細(xì)了解和脊髓功能磁共振成像所利用的信號(hào)變化的生物物理機(jī)制之間架起橋梁是很重要的。放射科醫(yī)生、神經(jīng)學(xué)家和脊柱外科醫(yī)生由于工作繁忙,無(wú)法親自進(jìn)行后期手動(dòng)生成量化指標(biāo),所以數(shù)據(jù)分析需要完全自動(dòng)化,方法耗時(shí)、不可靠或不準(zhǔn)確都是不可接受的。
3 算法的試驗(yàn)設(shè)計(jì)與分析
本文中詳細(xì)分析了常用典型目標(biāo)模型逼真度評(píng)估試驗(yàn)設(shè)計(jì)中涉及的目標(biāo)跟蹤特征提取算法,為接下來(lái)的試驗(yàn)結(jié)果分析提供基礎(chǔ)。試驗(yàn)設(shè)計(jì)遵循等效逼真和過(guò)程逼真的原則,即試驗(yàn)中所采用的仿真目標(biāo)模型圖像與外拍目標(biāo)圖像具有相同的成像距離、成像角度、3維幾何參量信息以及環(huán)境條件,對(duì)某些無(wú)法獲取的實(shí)際圖像,本文中盡量保證仿真目標(biāo)模型圖像和實(shí)際外拍圖像的一致性。
3.1 基于模板匹配的跟蹤算法
模板匹配跟蹤算法利用的目標(biāo)特征包括目標(biāo)形狀、面積、輻射對(duì)比度、輻射照度等,該算法具有簡(jiǎn)單、實(shí)時(shí)、高效、靈活的優(yōu)勢(shì),是最常用的跟蹤算法。大多的紅外目標(biāo)模型逼真度評(píng)估方法均以該算法為依據(jù),結(jié)合行業(yè)專家主觀判斷或行業(yè)專家加權(quán)綜合判斷。此方法優(yōu)于逐像素的統(tǒng)計(jì)分析方法,也是現(xiàn)階段該領(lǐng)域大多數(shù)研究人員所采用的評(píng)估驗(yàn)證方法。通過(guò)計(jì)算目標(biāo)模型圖像和實(shí)際目標(biāo)圖像的等效面積和等效灰度對(duì)比度兩類關(guān)鍵特征,在給定加權(quán)系數(shù)的條件下,計(jì)算該特征的加權(quán)均方差,該值說(shuō)明目標(biāo)模型的逼真度。
3.2 基于關(guān)鍵特征點(diǎn)的跟蹤算法
圖像最重要的信息是其包含的關(guān)鍵特征點(diǎn),可通過(guò)特征點(diǎn)來(lái)描述整幅圖像。基于關(guān)鍵特征點(diǎn)的提取方法,如SIFT算法,具有尺度和旋轉(zhuǎn)不變性、抗遮擋等優(yōu)點(diǎn),已經(jīng)大量應(yīng)用于目標(biāo)的跟蹤和檢測(cè)匹配。基于關(guān)鍵特征不變點(diǎn)的提取過(guò)程來(lái)指導(dǎo)目標(biāo)模型的紅外特性建模具有實(shí)際意義,根據(jù)關(guān)鍵特征點(diǎn)的描述可逆推得到目標(biāo)模型的重點(diǎn)建模部分。通過(guò)計(jì)算目標(biāo)模型圖像和實(shí)際目標(biāo)圖像相匹配的關(guān)鍵特征點(diǎn)描述子的均方差加權(quán)求和來(lái)闡述目標(biāo)模擬的逼真度。
SIFT算法提取圖像關(guān)鍵特征點(diǎn)的主要流程包括:(1)圖像金字塔尺度空間的構(gòu)建和極值檢測(cè);(2)關(guān)鍵特征點(diǎn)的定位與非極值點(diǎn)的抑制;(3)特征點(diǎn)方向的確定;(4)關(guān)鍵特征點(diǎn)的描述。
3.3 基于相關(guān)濾波的跟蹤算法
相關(guān)濾波跟蹤算法于2010年首次在學(xué)術(shù)界提出,該算法利用最小化平方和誤差來(lái)迭代計(jì)算最優(yōu)濾波器,使濾波器與輸入圖像的卷積響應(yīng)達(dá)到最優(yōu)峰值,在跟蹤過(guò)程中,根據(jù)當(dāng)前幀的濾波器和計(jì)算得到的位置模型更新下一幀的濾波器和位置模型,完成對(duì)目標(biāo)的跟蹤。該算法具有計(jì)算速率快、穩(wěn)定等優(yōu)點(diǎn),研究人員在相關(guān)濾波算法的基礎(chǔ)上提出了核相關(guān)濾波算法(kernel correlation filter,KCF)等[14]實(shí)時(shí)高效的跟蹤算法。相關(guān)濾波算法通過(guò)輸入多幀圖像和初始的濾波器,迭代計(jì)算所需的最優(yōu)濾波器模型,可簡(jiǎn)單表述為:

式中,H*為所需求解的最優(yōu)濾波器,F(xiàn)l為輸入圖像的局部區(qū)域,Gl=Fl·H*。上述最優(yōu)問(wèn)題表示為:H*=,跟蹤過(guò)程中采用在線更新策略,即逐次迭代后 Hl*=Al/Bl,其中,Al=ηGl·Fl+(1-η)Al-1,Bl=ηFl·Fl+(1-η)Bl-1,η為學(xué)習(xí)率。
通過(guò)計(jì)算跟蹤過(guò)程的最優(yōu)濾波器的均方差來(lái)說(shuō)明目標(biāo)模型圖像和實(shí)際目標(biāo)圖像的逼真度。
3.4 基于深度學(xué)習(xí)的跟蹤算法
深度學(xué)習(xí)的實(shí)質(zhì)是表示學(xué)習(xí)算法,通過(guò)建立深層次的網(wǎng)絡(luò)連接,利用大量訓(xùn)練樣本來(lái)提取圖像的隱式特征,對(duì)特征進(jìn)行有效的表示,從而解決所面臨的計(jì)算機(jī)視覺(jué)問(wèn)題。本試驗(yàn)的設(shè)計(jì)目的是利用網(wǎng)絡(luò)學(xué)習(xí)來(lái)提取目標(biāo)模型圖像與實(shí)際目標(biāo)圖像的卷積特征,采用遷移學(xué)習(xí)的主框架[15],提取全連接層中主要的目標(biāo)卷積表示特征,采用加權(quán)求均方差的方法評(píng)價(jià)目標(biāo)模型圖像的逼真度。
基于深度學(xué)習(xí)特征可靠性[16-21]遷移框架的目標(biāo)關(guān)鍵特征流程可描述為:(1)選用成熟的深度學(xué)習(xí)框架,利用開(kāi)源數(shù)據(jù)庫(kù)對(duì)框架進(jìn)行參量學(xué)習(xí);(2)挑選開(kāi)源數(shù)據(jù)庫(kù)中的車輛圖像對(duì)框架參量進(jìn)行重點(diǎn)學(xué)習(xí);(3)凍結(jié)框架中的大部分參量,輸入給定的試驗(yàn)圖像(圖像經(jīng)過(guò)旋轉(zhuǎn)可得到多個(gè)樣本),訓(xùn)練框架最后的全連接層,該層重點(diǎn)提取小樣本中的關(guān)鍵特征;(4)輸出全連接層的參量特征,進(jìn)行統(tǒng)計(jì)比對(duì)試驗(yàn)。
4 試驗(yàn)結(jié)果數(shù)據(jù)分析
本文中根據(jù)試驗(yàn)設(shè)計(jì)與分析的內(nèi)容,給出下列正反兩對(duì)試驗(yàn)數(shù)據(jù),圖1為所給定的兩組試驗(yàn)圖像數(shù)據(jù)(大小均為69pixel×143pixel)。依次為:卡車長(zhǎng)波紅外模型圖像、長(zhǎng)波紅外實(shí)際拍攝卡車圖像(對(duì)照試驗(yàn));坦克長(zhǎng)波紅外模型圖像、長(zhǎng)波紅外實(shí)際拍攝坦克圖像(設(shè)計(jì)試驗(yàn))。卡車圖像為不同類型的卡車圖像,目標(biāo)面積、對(duì)比度等信息均有一定的差異,以此組圖像作為對(duì)照試驗(yàn),從反面來(lái)說(shuō)明不同類型的模型跟蹤算法所提取的特征非常不同。坦克圖像為同類型坦克的紅外仿真模型圖像和實(shí)際拍攝圖像,設(shè)計(jì)此圖像的目的是為了從正面肯定本文中提出的方法。

Fig.1 Two sets of test images(truck and tank)
在(1)式中,權(quán)重系數(shù)均取0.5,將目標(biāo)灰度均值歸一化到和面積(目標(biāo)像素所占圖像像素比)等效條件下,利用(1)式計(jì)算卡車圖像面積和對(duì)比度特征的均方差為0.29,坦克圖像面積和對(duì)比度特征的均方差為0.02。
通過(guò)SIFT關(guān)鍵特征點(diǎn)(見(jiàn)圖2)的提取算法得到兩張卡車圖像總特征點(diǎn)均取25個(gè),相匹配的特征點(diǎn)為5個(gè);兩張?zhí)箍藞D像總特征點(diǎn)取50個(gè),相匹配的特征點(diǎn)為30個(gè)。在(2)式中,因?yàn)樘卣鼽c(diǎn)總數(shù)和相匹配特征點(diǎn)數(shù)目的不一致,故卡車圖像的權(quán)重系數(shù)取(5/25)-1×1/5=5×0.2,坦克圖像的權(quán)重系數(shù)為(30/50)-1×1/30=5/3×1/30。利用(2)式計(jì)算卡車圖像關(guān)鍵特征點(diǎn)的均方差為60.48,坦克圖像關(guān)鍵特征點(diǎn)的均方差為16.26。

Fig.2 SIFT features of truck and tank
通過(guò)相關(guān)濾波算法求取最優(yōu)濾波器得到的卡車和坦克最優(yōu)濾波器特征(見(jiàn)圖3),利用(3)式計(jì)算卡車圖像最優(yōu)濾波器特征的均方差為44.11,坦克圖像最優(yōu)濾波器的均方差為10.36。

Fig.3 Optimal filtering features of truck and tanka—the optimal filter feature of the picture of truck simulation mode—the optimal filter feature of infrared images of truck outsid—the optimal filter feature of the picture of tank simulation mode—the optimal filter feature of infrared images of tank outside
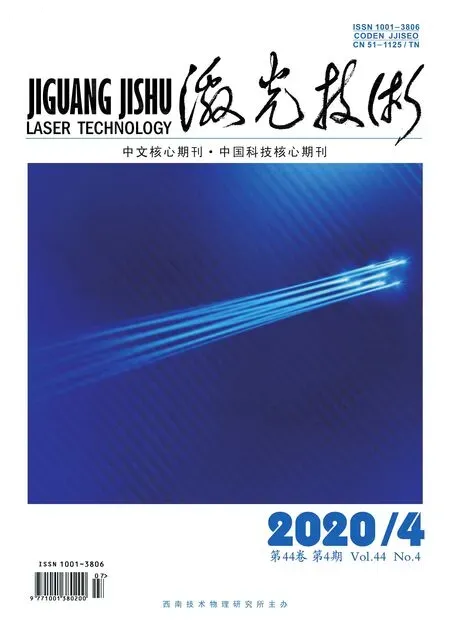
通過(guò)卷積網(wǎng)絡(luò)提取給定圖像的全卷積層主要特征(見(jiàn)圖4和圖5),在(4)式中,權(quán)重系數(shù)取 1/36,利用(4)式計(jì)算的卡車圖像卷積特征的均方差為41.22,坦克圖像卷積特征的均方差為22.07。
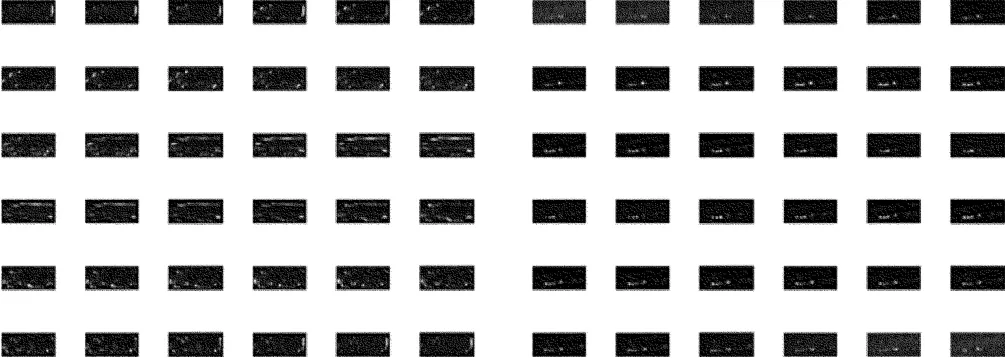
Fig.4 Truck convolution neural network full-connection layer coefficients
Fig.5 Tank convolution neural network full-connection layer coefficients
從上面給定的數(shù)據(jù)可知,對(duì)照試驗(yàn)組的均方差均是設(shè)計(jì)試驗(yàn)組的均方差的2倍以上。由于模板匹配中需要的目標(biāo)面積和灰度均值為百分比格式,且外拍實(shí)際卡車圖像與仿真卡車模型圖像平均灰度值相差較大,故均方差比坦克圖像的面積和對(duì)比度均方差相差10倍以上。(2)式的權(quán)重系數(shù)考慮了匹配的特征點(diǎn)數(shù)目與總特征點(diǎn)數(shù)目的比值后再取均值。
通過(guò)上述試驗(yàn)及結(jié)果分析可知,本文中提出的方法在目標(biāo)模型逼真度的評(píng)估方面有一定的效果,基于前人的等效逼真前提下,拓展了行業(yè)內(nèi)僅考慮逐像素級(jí)評(píng)估和目標(biāo)圖像面積、對(duì)比度等特征的主觀綜合評(píng)價(jià)。該方法簡(jiǎn)單可行且符合實(shí)際情況,但由于現(xiàn)階段行內(nèi)領(lǐng)域缺乏有效的紅外目標(biāo)模型標(biāo)準(zhǔn)數(shù)據(jù)庫(kù),故此方法并未達(dá)到非常滿意的結(jié)果,建立用于實(shí)驗(yàn)驗(yàn)證行業(yè)領(lǐng)域的紅外目標(biāo)模型標(biāo)準(zhǔn)數(shù)據(jù)庫(kù)是接下來(lái)的研究方向之一。
5 結(jié) 論
本文中提出了一種有效的方法來(lái)評(píng)估仿真紅外目標(biāo)模型:利用跟蹤過(guò)程提取的目標(biāo)關(guān)鍵特征算法來(lái)評(píng)估仿真紅外目標(biāo)模型的逼真度,并重點(diǎn)考慮以目標(biāo)模型為中心圖像。設(shè)計(jì)分析了現(xiàn)階段典型常用的跟蹤算法的特征提取,在等效逼真前提下計(jì)算了給定目標(biāo)圖像對(duì)的逼真度,從正反兩方面說(shuō)明了基于目標(biāo)圖像關(guān)鍵特征來(lái)驗(yàn)證目標(biāo)模型的有效性。
紅外目標(biāo)/場(chǎng)景模型的逼真度驗(yàn)證是行業(yè)內(nèi)的一大難點(diǎn),現(xiàn)階段主要根據(jù)行業(yè)專家的經(jīng)驗(yàn),結(jié)合外拍實(shí)際紅外目標(biāo)圖像(可能并不是等效逼真前提下),給出綜合的評(píng)價(jià),實(shí)際應(yīng)用中非常受限。本文中所設(shè)計(jì)的驗(yàn)證計(jì)算方案具有顯著的效果和可行的操作,具有一定的說(shuō)服力,因行業(yè)缺乏標(biāo)準(zhǔn)的紅外目標(biāo)模型數(shù)據(jù)庫(kù),故試驗(yàn)結(jié)果不盡人意,但是從跟蹤算法的關(guān)鍵特征和接下的對(duì)目標(biāo)模型庫(kù)的建立是仿真試驗(yàn)驗(yàn)證的發(fā)展方向。建立紅外目標(biāo)/場(chǎng)景標(biāo)準(zhǔn)數(shù)據(jù)庫(kù)對(duì)紅外半實(shí)物仿真試驗(yàn)意義重大,可實(shí)現(xiàn)半實(shí)物仿真試驗(yàn)代替外場(chǎng)試驗(yàn)的可能性。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化(高中版.高考理化)(2021年6期)2021-07-28 06:21:04
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
瘋狂英語(yǔ)·新策略(2019年10期)2019-12-13 08:43:28
當(dāng)代陜西(2019年10期)2019-06-03 10:12:04
數(shù)學(xué)小靈通·3-4年級(jí)(2017年9期)2017-10-13 08:10:54
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
NBA特刊(2014年7期)2014-04-29 00:44:03
河南科技(2014年23期)2014-02-27 14:19:15