基于k最近鄰的激光雷達飛機尾渦識別
2020-07-08 09:24:32潘衛軍吳鄭源張曉磊
激光技術 2020年4期
潘衛軍,吳鄭源,張曉磊
(中國民用航空飛行學院空中交通管理學院,廣漢618307)
引 言
飛機尾流是飛機產生升力的必然產物,主要是由翼尖渦流構成。當后機進入前機尾流影響區域時,可能會發生滾轉、掉高度等危險情況[1]。當前機相對后機質量更大時,該現象變得尤為明顯[2]。因此,國內外學者對飛機尾流演化機理進行了充分的研究,國內外民航組織均制定了相應的尾流間隔標準,美國和歐盟也開發了相應的飛機動態尾流間隔系統[3-6],用于保障航班安全。
針對飛機尾流的研究方法主要包括拖曳水池試驗、風洞試驗、計算流體動力學數值模擬和使用測風設備直接探測等。考慮到尾流的形成和消散會受到環境因素的影響,前3種方法研究的均是固定的參量下的尾流演化機理,而實際大氣并不是均勻的理想氣體,即使是考慮一定范圍,還是會存在差異。因此通過結合機場當地測定的影響飛機尾流的參量,使用測風設備對飛機起降過程中的尾流進行研究,能夠較為準確地分析和刻畫出特定機場的飛機尾流特性。
激光雷達測風設備具有高精度、高準確率的特點,國內外學者均使用激光雷達對飛機尾流進行大量的研究。HANNON等人使用脈沖相干激光雷達對飛機尾渦進行探測,并通過理論分析和實驗結果相驗證[7]。HARRIS等人使用連續波激光雷達對飛機尾渦進行探測[8]。XU等人從對稱性、展寬性以及反比性3個特性來分析尾渦識別方法[9],但未使用實地探測的數據進行驗證,且判定是否存在尾渦時,需要對3種特性的設定門限值,在實踐過程發現門限值較難設定。傳統飛機尾渦刻畫模型考慮的是飛機尾流影響區域產生的切向速度,這與激光雷達所探測到的徑向速度有所區別。其次,傳統尾渦刻畫模型在較為均勻的風場下與實際尾流數據較為符合。在實際探測過程中,背景風場往往都是非均勻風場,此時傳統模型和實際飛機尾渦數據并不能很好的匹配。作者所在團隊使用脈沖多普勒相干激光雷達在國內某機場進行了實地探測工作,在前期提出一種基于波形相似度匹配的飛機尾渦識別方法[10]和基于Alex的激光雷達飛機尾渦識別方法[11]。波形相似度匹配的方法將標準渦的波形與探測的結果匹配,靜風條件下效果良好,當具備一定背景風時,識別精度有限。圖像識別的方法能夠有效地對飛機尾渦圖像進行分類,但需要將激光雷達采集的數據生成圖像,再進行識別,且受限于生成圖像的方法和徑向速度色標設定的限制,不能滿足所有的情況,尤其是當具備一定不均勻背景風場的情況或色標設定過大或過小的情況下,錯誤識別率會大大提升。
鑒于此,作者基于激光雷達探測的起降航班尾流數據,對比分析了基于經典尾渦模型的正負速度包絡法的缺陷,進而提出對特定大小矩形區域特征提取方法,并使用 k最近鄰(k-nearest neighbor,KNN)算法對提取特征后的飛機尾渦進行有效的識別。
1 飛機尾渦模型
飛機上下翼面存在壓力差,其經過的區域的空氣受到擾動,最終呈現為一對渦旋的形式,其強度用渦環量來衡量。渦環量與飛機的重量成正比和飛機的速度成反比,初始渦環量Γ0用下式表示[1]:

式中,M,B分別表示飛機的質量和翼展,g為重力加速度,ρ為周圍空氣的密度,S為載荷系數,v為航空器速度,b0為初始渦核間距。
在模擬飛機尾渦剖面徑向速度的模型中,Hallock-Burnham(HB)模型因使用實際數據進行修正且表述較為簡單進而獲得了廣泛的應用,HB模型表示見下[1]:

式中,r為距渦核的距離,rc為渦核半徑(通常設為0.052b0),vt(r)表示切向速度。
激光雷達通過對大氣氣溶膠粒子的探測,在晴空條件下能對航空器尾渦進行較為精確的刻畫。由于飛機尾渦的影響面是對飛機飛過垂直平面的空氣擾動,因此,常規的探測方式是對飛機的飛行軌跡的垂直剖面進行距離高度指示器(range height indicator,RHI)模式的探測,具體如圖1所示。
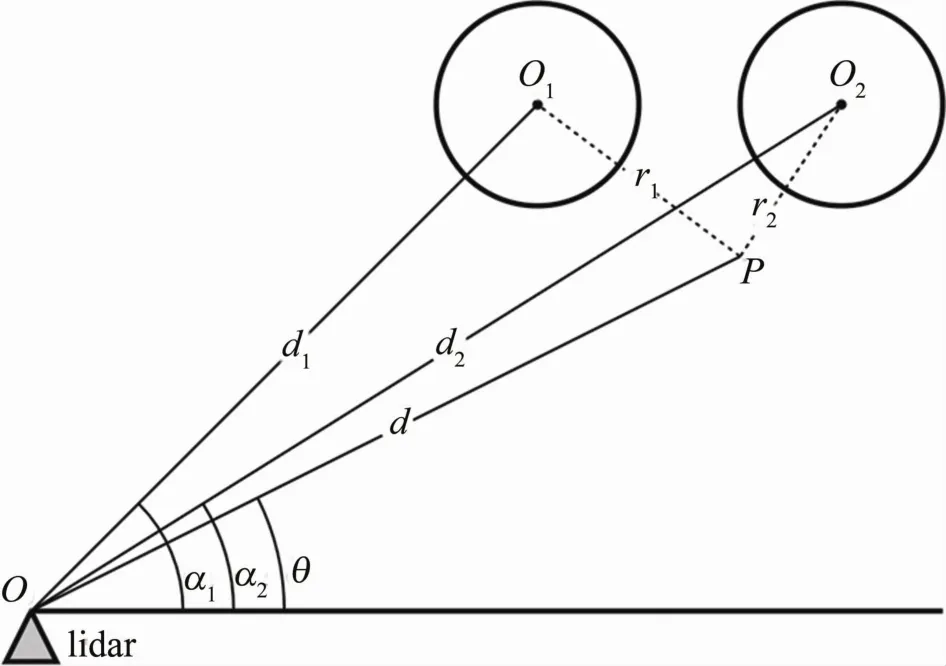
Fig.1 Schematic diagram of wake vortex measurement of LiDAR
圖1 中,O1,O2,O分別為左、右渦心和激光雷達探測點;α1,α2,θ分別表示雷達 RHI掃描時左、右渦和探測空間點俯仰角;d1,d2,d分別為激光雷達點距離左、右渦心和探測空間點的距離;r1,r2分別表示探測空間點距離左、右渦心的距離。
激光雷達處于RHI模式探測時,方位角固定,改變俯仰角對激光雷達接收回波做快速傅里葉變換,得到固定距離門的徑向風速速度,負值為接近激光雷達方向的速度,正值為遠離激光雷達方向的速度,數值的大小即為速度的值。當雷達從設定的掃描俯仰角掃描一周時,即得到一個切面的徑向速度風場:

式中,ρi表示距離激光雷達的徑向距離,θj表示激光雷達的俯仰角角度,vr表示該極坐標對應的徑向速度,n和m分別是激光雷達探測掃描所得到的俯仰角離散值的個數和徑向距離門的個數,實地探測采用的激光雷達,距離門個數n=56。
以全球飛機類型數量最多的空客A320為例,其機型參量如表1所示。
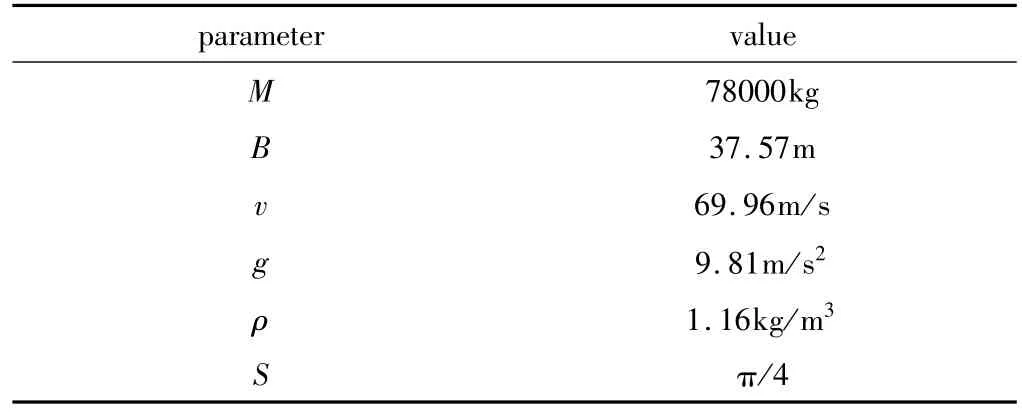
Table 1 Parameters of Airbus A320 and environment
將表1中的機型參量和環境參量代入(1)式和(2)式,設定飛機左右渦的渦心距離地面的高度為50m,渦點連線的中點距離激光雷達的水平距離為200m,背景風場為靜風。圖2a為依據這些參量所計算出的切向速率圖。靜風條件下HB模型得出的尾渦為左右對稱的渦旋結構,最大切向速度值為15.30m/s。表2中列出了實地探測中使用激光雷達的特征參量。
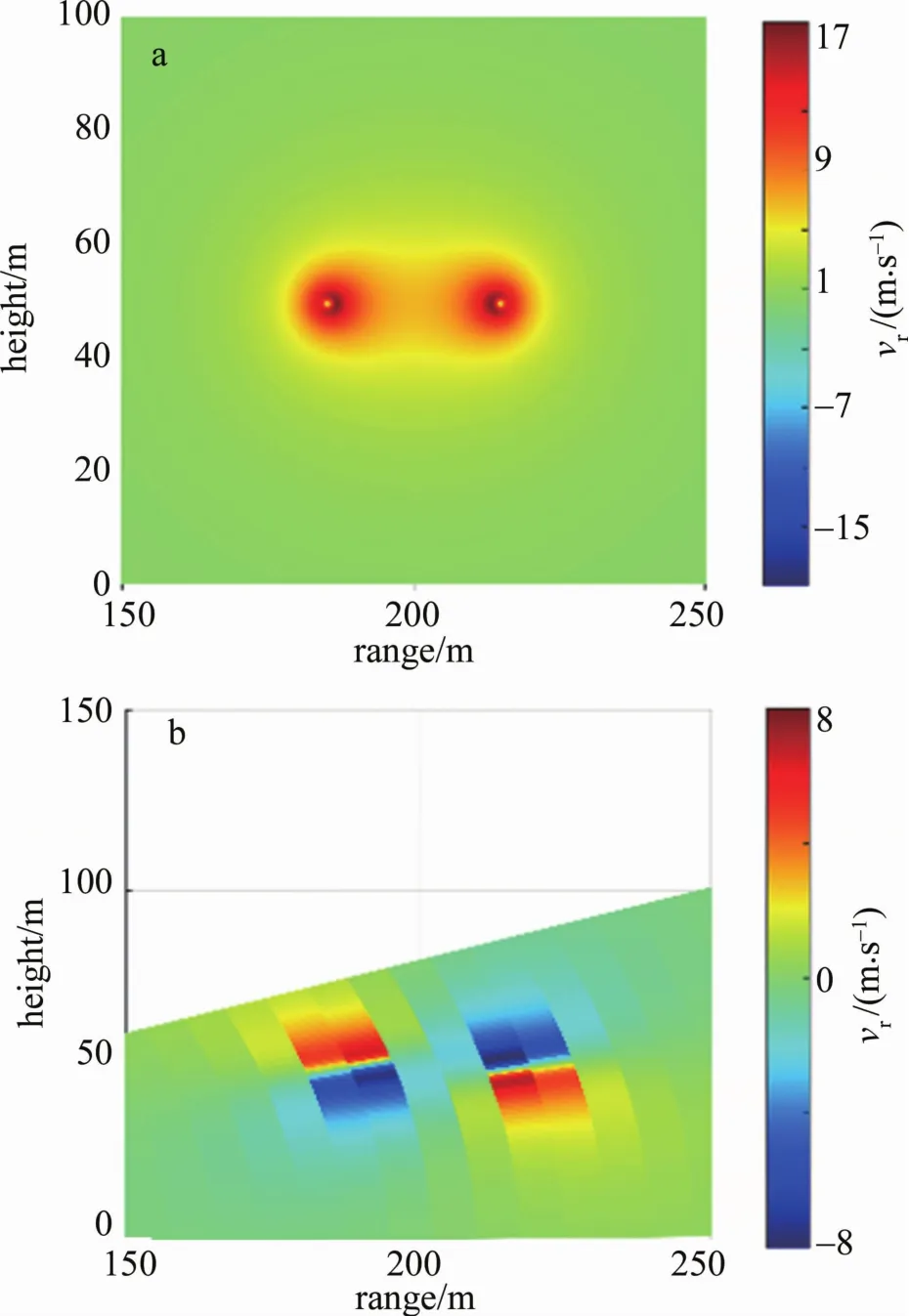
Fig.2 Wind field of HB model and simulated LiDAR detectiona—tangential velocity calculated from HB mode—radial velocity calculated by simulation
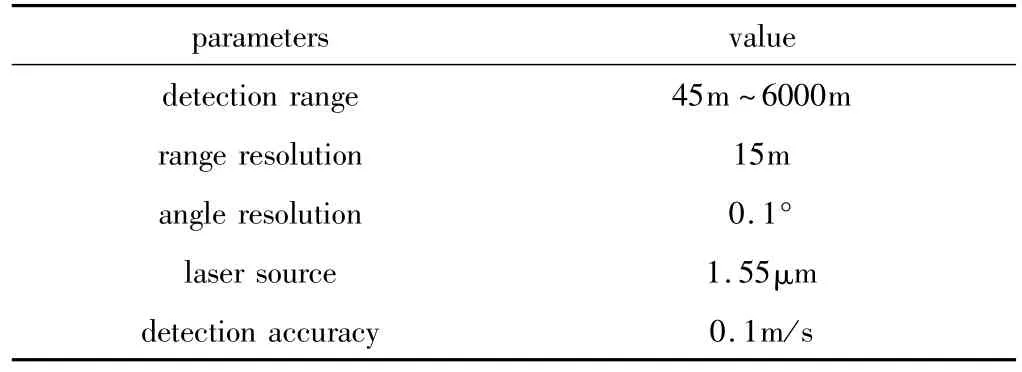
Table 2 Main parameters of the LiDAR
受限于激光雷達探測原理,脈沖激光雷達掃描得到的速度為徑向速度,相對切向速度,徑向速度損失了垂直于雷達掃描徑向上的速度分量,且有限的徑向分辨率和角度分辨率,所得到的徑向速度為(3)式所示的離散數據。根據現場探測試驗的實際參量,假設脈沖多普勒激光雷達探測精度良好,徑向分辨率為15m,角度分辨率為0.2°,根據圖1中描述的位置關系和設置的參量,計算出圖2a的切向速度場激光雷達探測到的徑向速度場,如圖2b所示。此時最大徑向速度值為7.87m/s,相對15.30m/s的最大切向速度值損失了接近一半,因此,使用傳統尾渦模型在匹配激光雷達所探測的徑向速度場時存在較大的誤差。此外,根據HB模型計算結果可得,空客A320的尾流在靜風條件下的徑向風速場影響區域為長100m、高70m的矩形區域。
2 徑向速度風場特征提取
多普勒測風激光雷達每次掃描獲取的為離散數據,即固定方向固定距離的徑向速度,如(3)式所示。如將徑向速度場直接當作特征用于分類,同樣的一組徑向風速,不同的排列(角度、距離)可能會有截然不同的分類結果,因此在對激光雷達徑向風速數據識別分類時,需先進行特征提取,提取中其中能表征飛機尾渦的特征。
本團隊于2018年8月至10月在國內某機場使用激光雷達進行飛機尾流的探測實驗,圖3展示為現場探測激光雷達和飛機的位置。作者從探測數據中選取了包含了具有一定背景風速較為典型空客A320的尾渦數據和非尾渦數據合計1273組,其中643組數據存在尾渦,另外630組數據不存在尾渦。圖4為實地連續探測的一組空客A320的徑向速度圖。尾流影響范圍為長100m、高70m的矩形區域,這與HB模型計算的結果基本一致。整個背景風場的風向大體趨勢是遠離雷達的方向,其中紅色和綠色區域相接的地方是探測出的尾渦區域,可以觀察到尾渦受背景風場等因素的影響,朝右下移動。對比理論模型計算出的模擬探測圖(如圖2b所示),在實際探測的數據中背景風場具有一定的風速,風場存在非均勻現象,此時使用波形匹配的方法計算出的波形和標準渦相差較大,對于圖4b,使用圖像識別的方法特征已經不是很明顯,變化色標的范圍,效果會更差。

Fig.3 Filed test of LiDAR
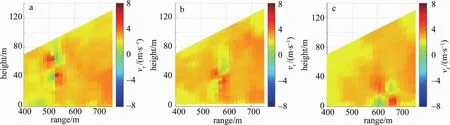
Fig.4 Wake vortex of Airbus A320 detected by LiDAR
考慮到背景風場為影響飛機尾渦的重要因素之一,在非均勻背景風場下,初始渦和標準渦有較大差異,因此本文中選擇平均背景風速作為重要的參考特征,用于表征背景風場對于飛機尾渦的影響,如下式所示:

圖5分別為多普勒激光雷達RHI掃描模式下,同一徑向風速場的徑向風速圖、距離速度極差圖和仰角-速度極差圖。如圖所示,真實的背景風場存在非均勻性,傳統的方法對徑向風速場按照俯仰角或距離提取多普勒速度極差[12],從而判斷極差最大的位置為渦核中心,存在誤判的可能。以距離為基準的最大正負速度包絡曲線處代表的區域并不是尾渦區域,以掃描俯仰角為基準的最大正負速度包絡曲線也不是尾渦區域。
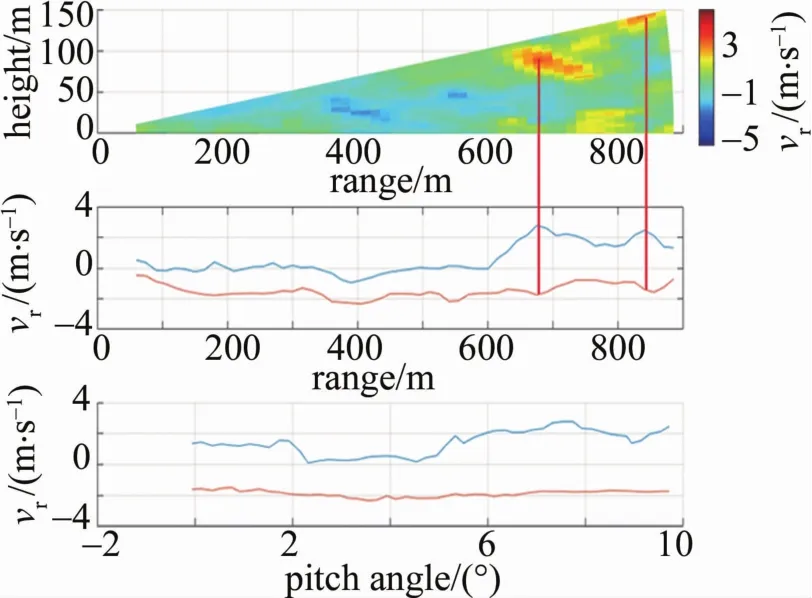
Fig.5 Comparison of velocity rangea—radial velocity of wind field detected by LiDA—velocity range of different rang—velocity range of different pitch angle
鑒于此,本文中將完整徑向速度場區域內的徑向速度極差作為特征參量,即:

3 k最近鄰分類方法
KNN分類算法是經典的統計學分類方法之一[13],其原理是通過從訓練數據集中選取最接近待分類數據的k個實例,根據其參量和類別預測樣本的分類,如圖6所示。圖6a中正方形和正六邊形分別代表已分類的數據集,五角星代表待分類的數據[14-15]。
訓練數據集T為KNN輸入:

式中,xi∈X?Rn為實例的特征向量,yi∈Y?{c1,c2,…,cK}表示實例的類別,對于徑向風速場的類別,分為兩類:存在尾渦和不存在尾渦,N為數據集的大小。
對于單組數據的特征xi包含了的特征表示如下:

式中,下標i表示第i組數據,下標(l)表示數據的第l維特征。此處l=2,對應第2節中所提出的平均背景風速和矩形區域速度極差,作為KNN分類的特征參量。影響KNN分類結果的因素主要包括已分類數據集、k值的選擇、距離度量方式和分類決策規則。
Fig.6 Diagram of KNN classification
如圖6b所示,k值分別為1,3和5時,對于五角星的待分類點的預測結果分別為正六邊形、正六邊形和正方形,k值的選擇對于預測分類的結果影響極大。選擇較大的k值會減少特征較為相似的數據對預測分類結果的影響,較小的k值則會增加異常數據對于預測分類結果的影響,因此k值應依據數據的特點進行選取。在具體應用中,k值一般取一個比較小的數值,采用交叉驗證法來選取最優k值。使用交叉驗證的方法來確定k值的大小,通過將數據70%作為KNN的訓練的訓練數據集,故訓練集的大小N=891,剩下部分作為測試集。
KNN采用閔可夫斯基(Minkowski)距離Lp來度量數據間的相似度:

式中,xi表示測試點第 i維特征值,xi,(l)表示樣本點第l維特征值,p為常數值。
在實際應用過程中,KNN一般選用p=2時的閔可夫斯基距離,即歐氏距離,也是本文中所采用的距離度量方式,即:

分類決策采用多數表決法,即由輸入實例的k個鄰近的訓練實例中多數類決定輸入實例的類。
4 數據驗證及模型評價
為評估不同k值的kNN分類方法的性能,采用準確率(accuracy,ACC)A、正預測值(positive predicted value,PPV)VPPV和真正率(true positive rate,TPR)RTPR作為評估指標,根據徑向風場是否存在尾渦,已經KNN分類預測是否存在尾渦可得出該分類的混淆矩陣,如表 3所示[16]。
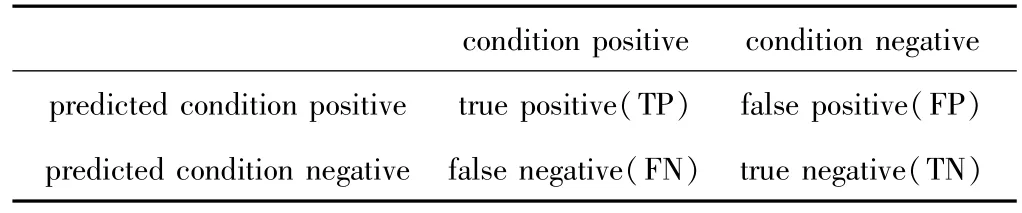
Table3 Confusion matrix
準確率A表示正確識別存在尾渦和不存在尾渦的徑向風速場數據占所有數據的比率:

正預測值VPPV實際存在的尾渦的徑向風速場數據占識別存在的尾渦的徑向風速場數據的比率:

真正率(true positive rate,TPR)RTPR為所有存在尾渦的徑向風場數據中,成功識別的比率:

真負率(true negative rate,TNR)RTNR為所有不存在尾渦的徑向風場數據中,成功識別的比率:

考慮實際應用中VPPV和RTPR有時差距過大,這里再額外納入數值F1來綜合評估KNN模型的分類性能:

根據第3節中提到的交叉驗證法,在實地探測的1273組徑向速度場數據中,隨機選取30%作為測試集數據,其余70%作為訓練集數據,測試得出KNN分類方法不同k值下的性能如圖7所示。
訓練集性能指標隨著k值的增大,總體上呈現的為下降的趨勢,而測試集性能指標隨著k值的增大,性能指標總體均為先增大后減小,不同k值會顯著影響該方法的性能。當k=11時,分類的結果如表3所示。依據分類結果計算分類器的性能,如表4所示。訓練集的平均性能指標達到了0.816,其中A=0.796,測試集的平均性能指標達到了0.729,其中A=0.717,按照樣本數量對訓練集和測試集的加權A達到0.772,效果較好,因此本文中選擇的是11NN分類方法。
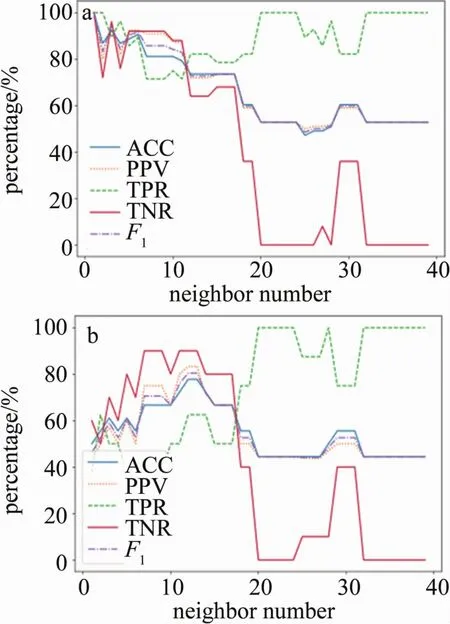
Fig.7 Performance of different ka—performance of train se—performance of test set

Table 3 Results of 11NN classifier

Table 4 Performance of 11NN classifier
作為評估預測與分類性能的指標,受試工作者曲線(receiver operating characteristic,ROC)已被廣泛地用于醫學以及機器學習等領域。當正負數據發生劇烈變化時候,其它指標也隨時會發生較大的變化,而ROC曲線卻能接近不變,因此ROC曲線可全面客觀地評價模型的性能,AUC(area under curve)是ROC曲線下面積,用于定量的評價分類型性能,能夠在一定程度上衡量模型的魯棒性。本文中提出的KNN的方法很大程度上受限于測試的數據,同樣的模型并不一定具有通用性,因此使用ROC和AUC來評價11NN分類方法的通用性能。
圖8a是11NN分類器中不同閾值下的實際存在尾渦和實際不存在尾渦的數據概率分布。據此能得到對應的11NN分類器所得到的ROC曲線,如圖8b所示,其遠離TPR=FPR的虛線,相應的AUC的值為0.855,說明11NN分類器在正負數據發生變化的同時,該分類器的性能不會發生較大的變化,說明11NN分類器具備了較好的魯棒性,根據上面得出11NN的性能參量,說明本文中提出的方法能夠很好地實現對尾渦的預測與分類。
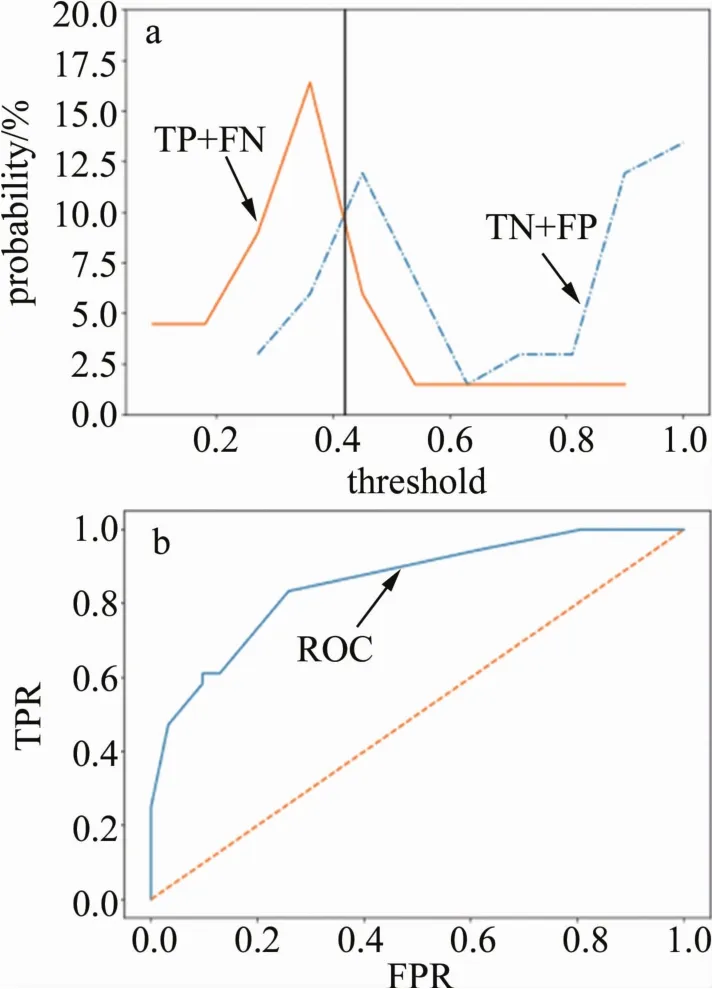
Fig.8 Performance of 11NNa—curve of different threshol—ROC curve
5 結 論
先結合尾渦HB模型和實地探測的尾渦數據,確定飛機尾流所影響的矩形區域,并對脈沖多普勒激光雷達探測到的徑向風速場按該區域提取尾渦特征值,該方法優于基于角度或距離的多普勒速度極差特征提取方法。在上述分析基礎上,本文中計算比較不同k值下的KNN分類器性能,得到了綜合性能最優的11NN分類器,利用11NN分類器對提取的徑向風速場進行分類和識別。實驗結果表明,本文中所提出的11NN的方法其綜合指在75%以上,AUC為0.855。該方法在尾渦預測和識別中具有較高的準確度和較好的魯棒性。本研究考慮的特征參量還是比較單一,后續工作將考慮更多的特征參量,并對模型進行調整改進。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
大眾健康(2021年6期)2021-06-08 19:30:06
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06
初中生世界·七年級(2017年9期)2017-10-13 22:27:46
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33