一種VSSFxLMS算法及其在多自由度微振動控制中的應用
2020-07-16 03:50:49方昱斌朱曉錦胡佳明高志遠苗中華
振動工程學報 2020年3期
方昱斌 朱曉錦 胡佳明 高志遠 苗中華
摘要:FxLMS算法常用于自適應振動控制研究領域,其固定步長導致不能同時獲得快的收斂速度和小的穩(wěn)態(tài)誤差。針對多自由度壓電結構振動主動控制,提出一種改進VSSFxLMS振動控制算法,通過利用反余切函數(shù)的特性優(yōu)化算法步長的迭代規(guī)律,有效提升算法對于噪聲干擾的魯棒性,并給出該算法的動態(tài)性能與穩(wěn)態(tài)性能分析。以壓電結構微振動多通道控制為目標,在ADAMS軟件中建立結構微振動主動控制仿真模型,通過與SIMULINK聯(lián)合仿真觀察振動控制算法實施效果。構建了基于壓電堆作動器的多自由度主動隔振結構,以及相關測控單元與實驗系統(tǒng),進行了結構微振動主動控制實驗與結果分析,驗證了所提出振動控制算法的良好控制效果和魯棒性。
關鍵詞:微振動主動控制;變步長(VSS);LMS算法;多輸入多輸出(MIMO);壓電結構
中圖分類號:TB535;TH113.1文獻標志碼:A 文章編號:1004-4523(2020)03-0467-10
DOI:10.16385/j.cnki.issn.1004-4523.2020.03.004
引言
近些年,航天事業(yè)及精密制造技術得到迅速發(fā)展,涉及到一些精密設備的微振動控制問題,引起了廣泛關注。例如衛(wèi)星搭載的觀測相機、精密制造中的投射電鏡和掃描電鏡、納米研發(fā)裝置等,其工作環(huán)境容許的振動速度低于10um/s,要想抑制這樣水平的微振動,通常的被動隔振手段難以實現(xiàn)。基于壓電機敏器件的特性,配合先進的結構振動主動控制方法與快速提升的計算力,使得精密裝置的結構微振動主動控制成為可能。
針對結構微振動主動控制問題,各研究團隊設計出多種微振動模擬平臺或者是微振動隔振平臺,用于實驗室中微振動環(huán)境的模擬及微振動主動控制系統(tǒng)的設計驗證。多數(shù)微振動隔振試驗臺都采用了Stewart結構,能夠實現(xiàn)多個自由度上的微振動抑制,但是該結構的6個作動器之間具有較強的耦合,運動解耦比較復雜,導致控制系統(tǒng)的設計實施變得相對困難。
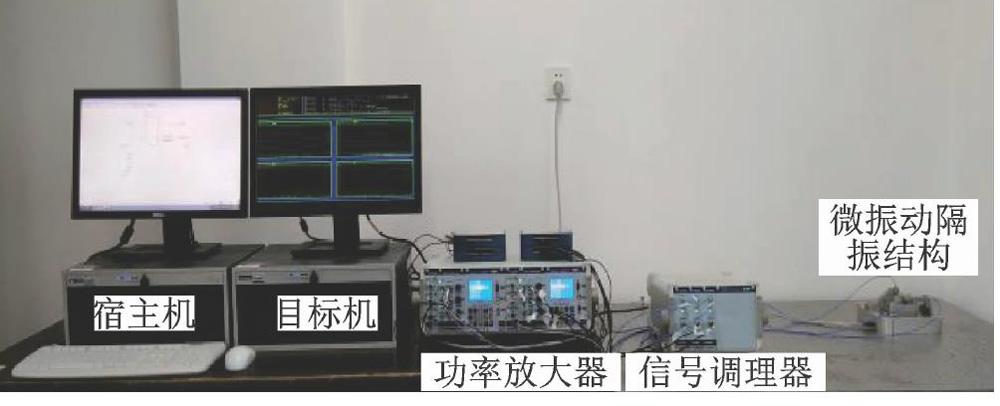
為了模擬多自由度微振動實驗環(huán)境,并驗證主動振動控制算法的性能,本文設計了一臺3自由度壓電微振動主動控制實驗隔振結構,并構建了相應測控單元及完成軟硬件開發(fā),可以實現(xiàn)結構微振動多自由度主動控制算法的實施與驗證。同時,針對實驗隔振結構的機械設計環(huán)節(jié),將多個作動器之間的耦合隔離,有利于復雜控制算法的設計實施和效果驗證。
對于結構微振動主動控制方法,現(xiàn)有研究已經涉及了極點配置、最優(yōu)控制、魯棒控制和自適應控制等諸多控制理論方法,各種方法的具體應用也各有其特點和局限。考慮到一些復雜設備與裝置可能存在的結構非線性與時變環(huán)節(jié),自適應振動控制方法具有較好的技術特點與優(yōu)勢,尤其在自適應噪聲與結構振動主動控制領域,基于自適應濾波算法的相關控制方法研究更為廣泛。當前,自適應濾波振動主動控制算法主要包括濾波-X最小均方算法(Filtered-X Least Mean Square,F(xiàn)xLMS),濾波X遞推最小二乘算法(Fihered-X Recursive LeastSquares,RLS)、快速橫向濾波算法(Fast Transver-sal Filtcr,F(xiàn)TF)等。FxLMS算法因其算法簡單、收斂速度快等優(yōu)點被普遍使用。但是FxLMS算法在參數(shù)自適應調節(jié)時所采用的傳統(tǒng)固定步長最小均方(LMS)算法,很難同時保證收斂速度和穩(wěn)態(tài)精度,因此學者們提出了變步長最小均方(VariablcStep Size LMS,VSSLMS)改進算法,其主要思想是在算法的收斂初期采用較大步長以提高收斂速度,而在穩(wěn)態(tài)附近時采用較小步長以減小穩(wěn)態(tài)誤差。
事實上,從第一個VSSLMS算法被提出至今,已經有數(shù)十種VSSLMS算法問世,并且仍在持續(xù)研究中。對現(xiàn)有VSSLMS算法的步長因子更新機理加以分析,VSSLMS算法可以分為三類。
第一類是基于歸一化形式的VSSLMS算法,通過對步長除以輸入信號的二范數(shù),以增加算法對于輸入信號幅值變化的魯棒性。但是這樣的處理會影響到算法的收斂速度及其實時性,不適于應用在嚴實時性及要求快速收斂的系統(tǒng)中。第二類是由覃景繁等提出的一種基于Sigmoid函數(shù)的VSS-LMS算法,其根據(jù)Sigmoid函數(shù)的曲線特性來調節(jié)步長因子的變化;在這種算法的機理上,后續(xù)又有學者提出了基于箕舌線的VSSLMS算法、基于正弦函數(shù)的VSSLMS算法、基于反正切的VSSLMS算法等;這類算法整體來說對于函數(shù)曲線的依賴比較嚴重,使其對于具體應用系統(tǒng)的調節(jié)不夠靈活。第三類是以Kwong等為代表所提出的算法,該類算法以瞬時誤差控制步長因子的更新,并通過遺忘因子來減弱之前時刻誤差的權重值;由于誤差信號采集過程中會引入不同程度的噪聲,步長因子迭代必然會受到影響,這使得算法的穩(wěn)態(tài)精度不易得到保證。
對于文獻提出的VSSLMS算法,其依據(jù)系統(tǒng)瞬時誤差的平方值迭代更新算法收斂步長,相比于傳統(tǒng)LMS算法,對躍變的跟蹤能力得到提升,但是其抗干擾能力仍欠佳。文獻對此做了相關改進,利用系統(tǒng)誤差與其前一采樣的系統(tǒng)誤差的自相關估計來更新收斂步長,提升了算法對于噪聲干擾的魯棒性。文獻對文獻中的算法做了簡化改進,在保持算法性能的同時減少了迭代計算量,增加了算法在實時系統(tǒng)中的應用優(yōu)勢。
此外,大部分VSSLMS算法都是基于系統(tǒng)辨識和主動噪聲控制應用設計提出的,與其在結構振動主動控制研究中的應用有所差異。對于結構振動主動控制應用,在收斂過程中系統(tǒng)可能會受到外界瞬時強烈的寬頻噪聲干擾,使得VSSLMS算法產生較大步長,控制器輸出過大的作動信號,反而會引起穩(wěn)態(tài)附近的大幅振動,對系統(tǒng)穩(wěn)定性造成不利。因此,若要將VSSLMS算法應用在結構振動主動控制中,對于噪聲干擾的魯棒性需要認真考慮。
針對結構微振動主動控制應用的特點,本文提出一種VSSLMS算法,該算法利用反余切函數(shù)的特性,針對文獻[18]中提出的算法進行了改進,建立了瞬時誤差與步長因子之間的非線性函數(shù)關系,使得算法在收斂速度與精度之間達到平衡,并且對于噪聲具有較好的魯棒性;在此基礎上,在ADAMS中建立基于壓電堆作動的3自由度微振動主動控制仿真模型,通過SIMULINK與ADAMS的聯(lián)合仿真,驗證了所提出算法在濾波-X前饋結構中的收斂性;最后,構建基于多自由度壓電隔振結構的微振動主動控制實驗平臺,通過不同條件下結構微振動多通道控制實驗,對比驗證了改進變步長濾波-X最小均方(Variable Step Size Filtered-x Least MeanSquare,VSSFxLMS)算法在結構微振動主動控制中的有效性和魯棒性。
1VSSLMS算法的提出
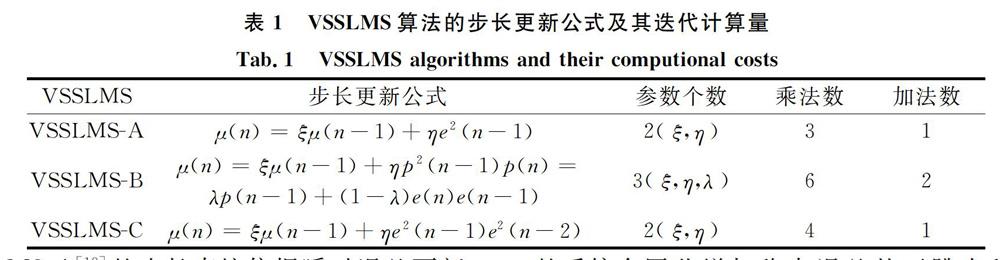
在本節(jié)中,將文獻[18-20]中的VSSLMS算法的步長更新公式做簡要介紹,并對其每次步長迭代中所需要調節(jié)的參數(shù)個數(shù)以及計算量做了對比,如表1所示。為了方便表示,下文中將文獻中的VSSLMS算法分別表示為VSSLMS-A,VSS-LMS-B和VSSLMS-C,將改進算法命名為VSS-LMS-New。
VSSLMS-A的步長直接依據(jù)瞬時誤差更新,在結構振動控制系統(tǒng)中瞬時誤差值是在不斷振蕩變化的。同時,還會有噪聲干擾引起的結構振動,這會使得算法步長變化對于系統(tǒng)噪聲干擾比較敏感,從而會引起控制器的輸出波動甚至大幅波動,穩(wěn)態(tài)中的系統(tǒng)會因此增加穩(wěn)態(tài)誤差甚至跳出穩(wěn)態(tài)直至發(fā)散。VSSLMS-A算法中共有2個調節(jié)參數(shù)ξ和η,其中0<ξ<1,η>0;參數(shù)ξ是遺忘因子,決定過去時刻步長在迭代中的權值,參數(shù)η控制算法的調節(jié)速度及穩(wěn)態(tài)誤差。
VSSLMS-B中的步長通過系統(tǒng)誤差e(n)及其前一采樣時刻系統(tǒng)誤差e(n-1)的自相關系數(shù)估計值計算得到。引入誤差的自相關系數(shù),可以減弱噪聲干擾對于系統(tǒng)收斂步長的影響,從而增加算法對噪聲干擾的魯棒性。VSSLMS-B有3個調節(jié)參數(shù)ξ,η和λ。ξ和η的取值范圍和作用與VSSLMS-A相同,參數(shù)λ(0<λ<1)是平均時間常量的遺忘因子,決定過去時刻的采樣信息對當前估計值的影響權重。雖然該算法一定程度上提升了VSSLMS-A對于噪聲干擾的魯棒性,但是增加了一個調節(jié)參數(shù),每次迭代中增加了3次乘法運算和1次加法運算,這對于實時系統(tǒng)尤其是多輸入多輸出實時系統(tǒng)來說可能會影響其實時性。
VSSLMS-C對VSSLMS-B做了簡化,略去加權因子入,僅需要2個調節(jié)參數(shù),且步長更新的每次迭代僅需要4次乘法運算和1次加法運算,增加了該算法在實時控制應用中的優(yōu)勢。文獻[20]通過仿真表明了VSSLMS-C與VSSLMS-B在傅里葉分析中具有幾乎相同的收斂性能,但該算法并未在結構振動主動控制研究中進行過驗證。
VSSLMS-A中步長迭代更新量為,ηe2(n),因為參數(shù)η是個固定值,則除去遺忘因子的衰減作用之外,步長增量主要受誤差e(n)影響。當e(n)在0附近振蕩時,下一步迭代的步長增量就會很小,這在算法收斂初期很影響收斂速度。在算法收斂至穩(wěn)態(tài)時,e(n)受到噪聲或者擾動的影響導致瞬時值變大,則引起步長瞬間增大,會導致系統(tǒng)脫離穩(wěn)態(tài)重新振蕩。
利用反余切函數(shù)的特性,將VSSLMS-A中的迭代更新參數(shù)刀改進為與誤差信號相關的變量η(n)=βarccot(| e(n)|),則可以大幅改善上述情況。在收斂初期,參數(shù)η(n)會削弱誤差信號e(n),振蕩帶來的收斂速度減緩,保證算法快速收斂;在穩(wěn)態(tài)時,參數(shù)η(n)能夠抑制噪聲干擾等導致的誤差瞬時值突變所帶給系統(tǒng)穩(wěn)態(tài)的影響,提升穩(wěn)態(tài)時算法的魯棒性。
針對結構振動主動控制系統(tǒng),提出一種改進VSSLMS算法,以增強算法對噪聲干擾的魯棒性。VSSLMS-New的步長更新公式如下式所示:
相比于VSSLMS-A,VSSLMS-New中的參數(shù)η(n)是一個基于反余切函數(shù)性質的時變參數(shù),暫叫做步長抑制因子。步長抑制因子η(n)利用反余切函數(shù)的性質,可以在誤差信號突變時抑制步長的突變,提高算法對于噪聲的魯棒性。
在VSSLMS-New中,步長迭代包含有2個調節(jié)參數(shù)ξ和β。其中,ξ與VSSLMS-A中作用相同,取值范圍0<ξ<1;β(β>0)為縮放因子,根據(jù)實際系統(tǒng)中誤差信號數(shù)值的數(shù)量級進行配置。在步長的每次更新迭代中,VSSLMS-New需要4次乘法運算和1次加法運算,與VSSLMS-C相同,比VSS-LMS-B少2次乘法運算和1次加法運算。與VSS-LMS-A算法相比,所需調節(jié)的參數(shù)個數(shù)相同,每次迭代需要多1次乘法運算。
2 VSSLMS-New算法分析
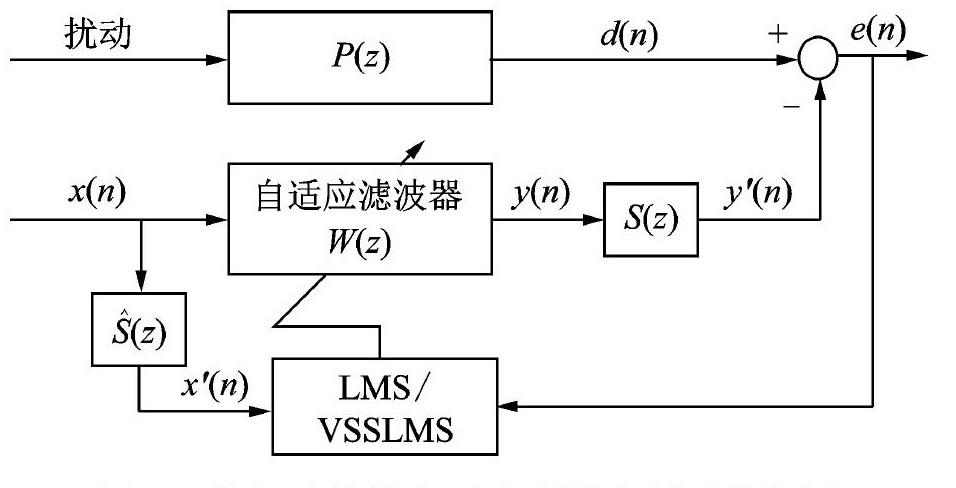
如圖1所示,在自適應濾波過程中,依據(jù)梯度下降法可得到VSSLMS算法自適應濾波器的權值遞推如下式所示:
式中 w(22)為自適應濾波器權值向量,w*(n)為最優(yōu)濾波器權值向量,x(n)為輸入信號序列,d(n)為擾動在主通道的響應,y(n)為自適應濾波器的輸出,e(n)為誤差信號,n為離散時間序列,u(n)為時變步長因子,ξ(n)為零期望的測量噪聲信號,符合白噪聲特點。
為了方便分析,假設輸入信號序列x(n)符合高斯分布,期望為0.則輸入信號的自相關矩陣定義為R=E[x(n)xT(n)],可以寫成R=QAQT,其中A為特征值矩陣。假設最優(yōu)濾波器權值向量w*(n)的階數(shù)與系統(tǒng)真實模型相同,即w*(n)能夠準確表示實際系統(tǒng)。
2.1 平均意義下的動態(tài)分析
根據(jù)VSSLMS-New算法的步長更新公式,將式(3)-(5)代入式(1)可得下式
式中 V(n)=w(n)-w*(n),V(n)表示自適應濾波器權值向量偏差,V(n)=QTV(n),x(n)=QTx(n)。
通常,參數(shù)η(n)的值比較小。所以,相比于誤差信號e(n)和輸入序列x(n),步長因子u(n)的變化是很緩慢的。因此,可以認為步長因子u(n)與其自身平方u2(n)、誤差信號e(n),自適應濾波器權值向量w(n)以及輸入序列x(n)都相互獨立,則濾波器權值向量期望收斂的一個充分條件為式中 λmax(R)是矩陣R的最大特征值。
2.2 均方意義下的動態(tài)分析
誤差信號的均方差(mean square error,MSE)定義如下式所示