基于常規氣動布局無人機設計優化
2020-07-20 16:30:29陳文會呂羿良李勇霖喬治林涌鑫吳德煒
中國信息化 2020年6期
關鍵詞:設計
陳文會 呂羿良 李勇霖 喬治 林涌鑫 吳德煒
現如今對“低慢小”型無人機的主流氣動布局為多旋翼布局,也有少數選擇旋翼布局等。但多旋翼無人機的載重能力、飛行速度、續航半徑、安全性以及能源利用率普遍偏低。其在出現例如單發失效等特殊險情下,多旋翼無人機的可控性幾乎為零。旋翼布局無人機在遇到強氣流的影響時其安全性能會明顯下降。本文采用的常規布局固定翼無人機則在特種飛行、續航時間、能源利用率等問題上有明顯優勢。
固定翼無人機相比較多旋翼無人機具有著例如小推重比、滑翔性能、可控性能等有著不可磨滅的先天優勢。常規布局無人機最小推重比普遍低于旋翼無人機與多旋翼無人機,同時固定翼無人機的續航半徑、滯空時間、任務半徑等,普遍高于多旋翼無人機。
固定翼無人機但也具有著起飛不便、控制難度過大以及其轉向半徑較大等缺陷。本文通過對常規布局固定翼無人機進行優化設計,飛行控制方式進行優化處理,以及其機械結構的優化與材料加工工藝等方面進行重新設計,對重量與結構進行嚴格要求。
一、設計思路及方法
常規布局無人機是目前最為成熟的固定翼飛行器氣動布局,其在航空理論領域有著最為完整的知識體系,同時在各大航空器上,該氣動布局被廣泛應用。但其相較于其它氣動布局飛行器的飛行阻力偏大,同時常規布局飛行器的機動布局普遍偏低。
為改善常規氣動布局飛行阻力較大,機動性能較差等問題,同時提升其滑翔性能,使固定翼無人機的應用范圍進一步擴大。
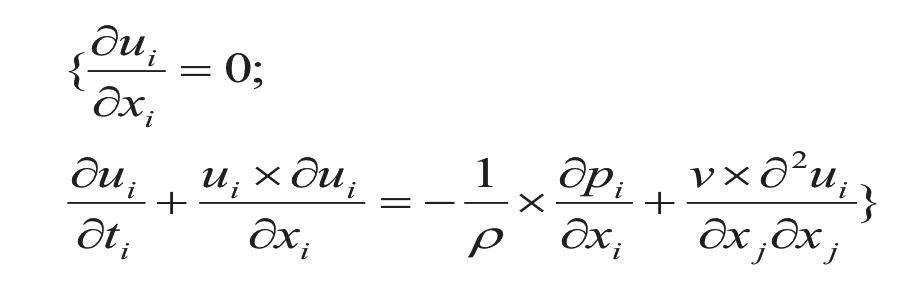
本文采用雷諾N-S方程作為基礎方程,用3D-Panel對飛行器在流場中的氣動特性進行計算,并以XLFR-5軟件進行輔助。其中3D-Panel是對渦格法(VLM)與升力線法(LLT)的結果進行細化。再利用Re=ρvL/μ對飛行所需雷諾數進行初步計算。其中ρ為流體密度,μ為動力粘性系數,v為流場的特征速度,L特征長度。
該款無人飛行器為低空低速飛行器,最大飛行速度為20米每秒,最大升限為1000米。在此飛行速度及飛行高度的區間內,我們將大氣視為理想流體進行計算。飛行阻力則著重考慮誘導阻力、干擾阻力及粘性阻力。
二、無人機性能參數的確定
目前國內外小型無人機市場中,多旋翼無人機的巡行速度為6-8m/s,續航時間為21分鐘,實際飛行半徑為300米。外掛載重約為200g。固定翼小型無人機的翼展為1200mm,最大飛行速度約80km/h,起飛重量約為1kg,理論飛行時間為45min。
本文所設計的常規氣動布局無人機,翼展為1200mm,機長約為600mm。最小飛行速度4m/s,巡航速度15m/s,理論升限3000m。其最大起飛重量3kg,有效載荷1.7kg,轉場半徑10km,最小轉彎半徑1.5m。
三、飛行器幾何參數的選取
該型無人機的幾何參數的確定需要考慮翼型的優化設計、機翼展弦比的選擇、機翼根梢比的選擇、水平尾翼位置的確定、重心位置的設計、靜裕度及安全裕度等問題。
(一) 翼型的設計
常規布局無人機的升力是由機翼產生,對于部分加有翼身融合技術設計的常規布局飛行器,機身將附加提供7%-13%的總升力,同時整機阻力也有相對應的下降,飛行器的升阻比會有顯著提升。對于“低慢小”型常規布局無人機,在目前較為成熟的設計理念下,對其氣動外形優化工作中,翼型的設計尤為重要。
本文中將采用NACA五位數字系列翼型,針對“低慢小”型常規布局無人機進行優化。

利用NACA標準公式對翼型中弧線進行設計計算,其中k1參照表1。通過改變中弧線的相對弧度及位置,使最后翼型的最大升力系數、臨界迎角、升阻比、零升力迎角等重要參數。對于本文所涉及的常規布局無人機飛行器,其需滿足較高的升阻比以及較大的臨界迎角。通過減小中弧線的相對弧度,可使臨界迎角產生后移。
翼型厚度對翼型的升阻比也起著重要影響。

利用上述公式對該無人機翼型進行設計,改變翼型厚度可直接減小翼型曲線長度,將直接降低機翼的摩擦阻力。
表1 NACA五位數字翼型族第一組中弧線常數

(二)飛機展弦比的選取
無人機展弦比的選取尤為關鍵,更高的展弦比可直接減小無人機的誘導阻力以及配平阻力,同時增加飛行器的縱向穩定性。但整塊機翼的加工工藝難度、結構重量以及對結構強度設計的要求將有所上升。小的展弦比雖具有著更為簡單的加工工藝及更低的結構強度需求,但較大的翼載荷對整機的穩定性及飛行阻力存在著不利因素。
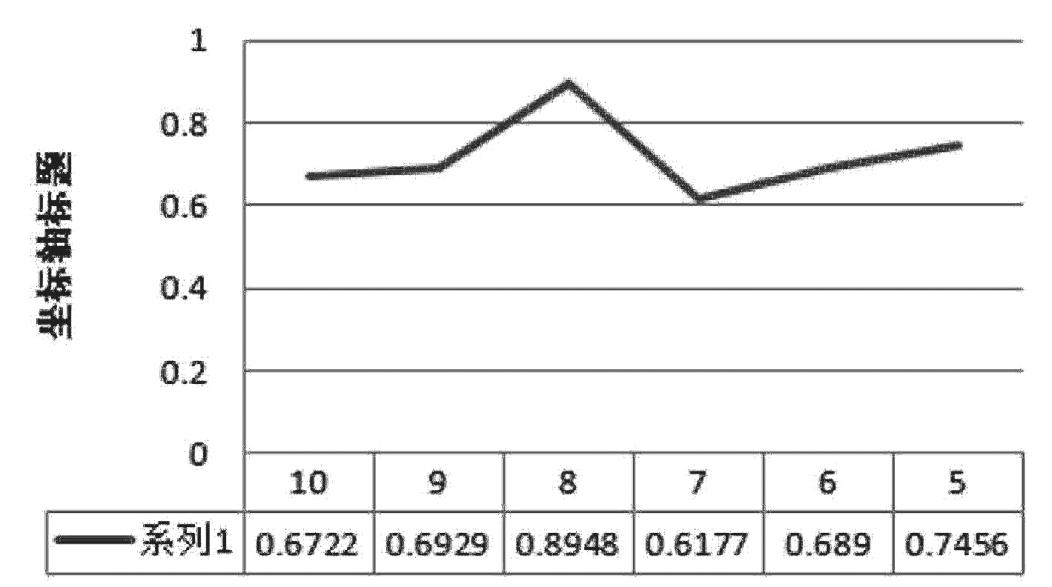
通過對材料加工工藝及大數據的檢索分析,由圖一不難看出,在展弦比為8時,其阻力有著明顯突變,其阻力系數大于展弦比為7時與展弦比為9時,但展弦比的整體曲線依舊呈上升趨勢,升力與展弦比的關系與阻力相同,如圖2所示。因此本文所設計優化的常規布局無人飛行器的展弦比將設定為8。
圖1 展弦比與阻力系數關系
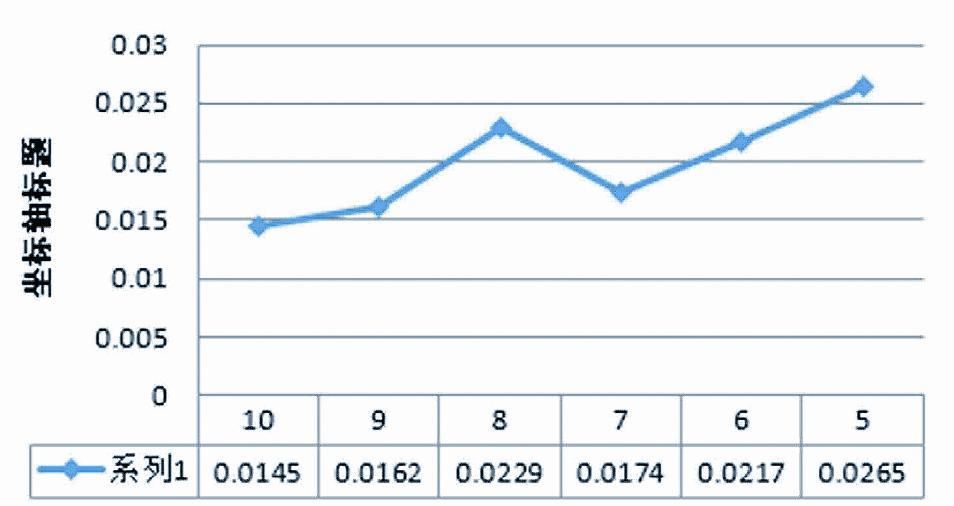
圖2 展弦比與升力系數關系
(三)飛機根梢比的確定
飛機根梢比決定飛行器主機翼的平面形狀,當根梢比為1時其機翼平面形狀為長方形,當根梢比加大后飛機機翼的平面形狀則變成梯型。相比較長方形機翼而言,梯型機翼所產生的誘導阻力則有相對應的減小。但機翼的整體加工難度也會有所上升。
(四)飛機水平尾翼位置的確定
眾所周知,尾翼是為整架飛機提供配平氣動力及俯仰與滾轉的操作力矩。其中水平尾翼與主機翼間的相對位置是至關重要的。當水平尾翼距離主機翼過近時,主機翼所產生的下洗氣流將會對水平尾翼產生影響,使水平尾翼的迎角發生改變,產生過大的上仰力矩使飛機過于抬頭。當水平尾翼位置過于遠離主機翼時,雖避開主機翼的氣流,使水平尾翼受主機翼的影響減小。但使機身的設計難度增加,機體結構質量增加,整機性能有明顯的下降。
(五)飛機靜裕度及安全裕度的選擇
飛行器設計中,靜裕度及安全裕度的設定尤為重要。增加安全裕度可使飛行器的整體強度,使其受過載能力得以增加。但同時要面臨著更大的結構重量以及更大的能耗,使整機的機動性能呈指數倍下降。因此通過多方考慮,本文所涉及的飛行器安全裕度為150%。
靜裕度問題將直接影響到飛行器在空中的穩定性,通常通過改變重心至主機翼焦點的距離來更改飛行器靜裕度。當重心遠離主機翼焦點飛機將趨于穩定狀態,當重心靠近焦點或處于主機翼與平尾焦點之間時,飛行器將處于不穩定狀態,同時伴隨著機動性能的大幅度提升。
四、結論
翼型最大厚度位置前移可增加翼型的升力系數。
過小的相對彎度可加大飛機的失速迎角。
通過改變飛機的重心位置,可改變飛行器的靜裕度從而使飛行器處于穩態及介穩態。
作者單位:北京理工大學珠海學院航空學院
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04