基于多傳感器數據融合技術的機器人運動姿態檢測應用研究
2020-07-30 16:05:17崔瑞超盧亞娟
河南科技 2020年16期
關鍵詞:多傳感器
崔瑞超 盧亞娟

摘 要:本設計利用多傳感器信息融合技術把采集到的數據進行融合,并把信息反饋給控制器,為實現實時控制和智能控制提供保障。最后,通過該算法在機器人運動姿態檢測中的應用驗證該算法的正確性。結果表明:此種方法無須傳感器的任何先驗知識,能客觀顯示各傳感器的可靠程度,比其他方法具有更高的融合精度。
關鍵詞:多傳感器;信息融合;機器人運動姿態檢測
中圖分類號:TP391.41;TP242 文獻標識碼:A 文章編號:1003-5168(2020)16-0019-03
Abstract: In this design, multi-sensor information fusion technology was used to fuse the collected data and feed back the information to the controller, providing guarantee for the realization of real-time control and intelligent control. Finally, the correctness of the algorithm was verified by the application of the algorithm in the robot motion attitude detection. The results show that this method does not need any prior knowledge of sensors, can objectively show the reliability of each sensor, and has higher fusion accuracy than other methods.
Keywords: multi-sensor;information fusion;robot motion attitude detection
1 多傳感器數據融合的定義和原理
多傳感器數據融合是將多個同類型或者不同類型的傳感器的信息進行綜合處理的過程,以更高的精度、概率得到人們需要的目標狀態估計,為上層提供有用的決策信息。多傳感器融合可以充分利用采集到的信息,了解被檢測目標的位置,提高測量精度[1-2]。
多傳感器融合的原理就像人的大腦一樣,可以處理多重復雜信息,把多個傳感器信息資源使用某種規則進行組合,綜合處理復雜問題。
1.1 數據融合分析
為了測量機器人在運行過程中的偏移比例和偏航角度,在車體上安裝傳感器。傳感器包括測距傳感器和測角度傳感器。角度傳感器測到的角度數值經過融合后獲得機器人的位置方向,可通過對機器的姿態調整,使得機器人更好地工作[3-4]。
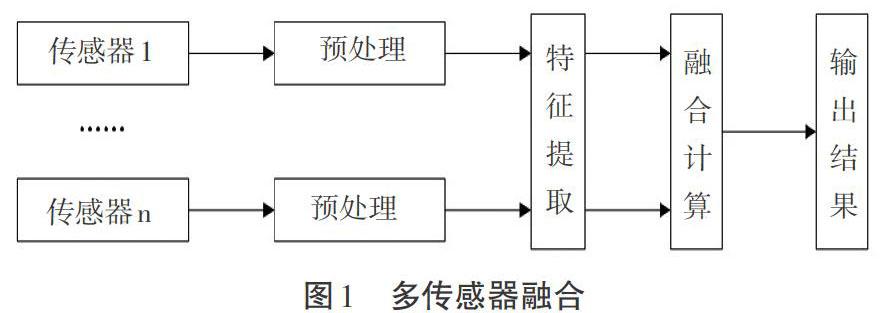
傳感器把采集到的數據信息進行預處理后,經過特征提取和融合計算后,把融合后誤差小的數據輸出,具體如圖1所示。
1.2 數據的一致性檢驗
使用多傳感器測量時,在進行數據融合前要對測量的數據進行檢驗;若不檢驗,當傳感器出現故障或干擾因素時,會造成測量數據不準確,使融合精度變低。采用[m]個傳感器進行測量,先要對測量值[Xi(i=1,2,…,m)]進行檢驗,規則是相鄰兩個測量值之差小于等于給定的閾值[ε],即滿足式(1)。
2 多傳感器自適應加權融合算法
2.1 自適應融合模型
融合估計模型就是對傳感器采集的數據進行融合,如圖2所示。不同的傳感器,其加權因子也不一樣,把傳感器測到的數據經過自適應的方法計算出各自的最優加權因子,經過融合計算輸出最優的結果[X∧]。
2.2 自適應加權融合算法
3 算法在運動姿態檢測的應用
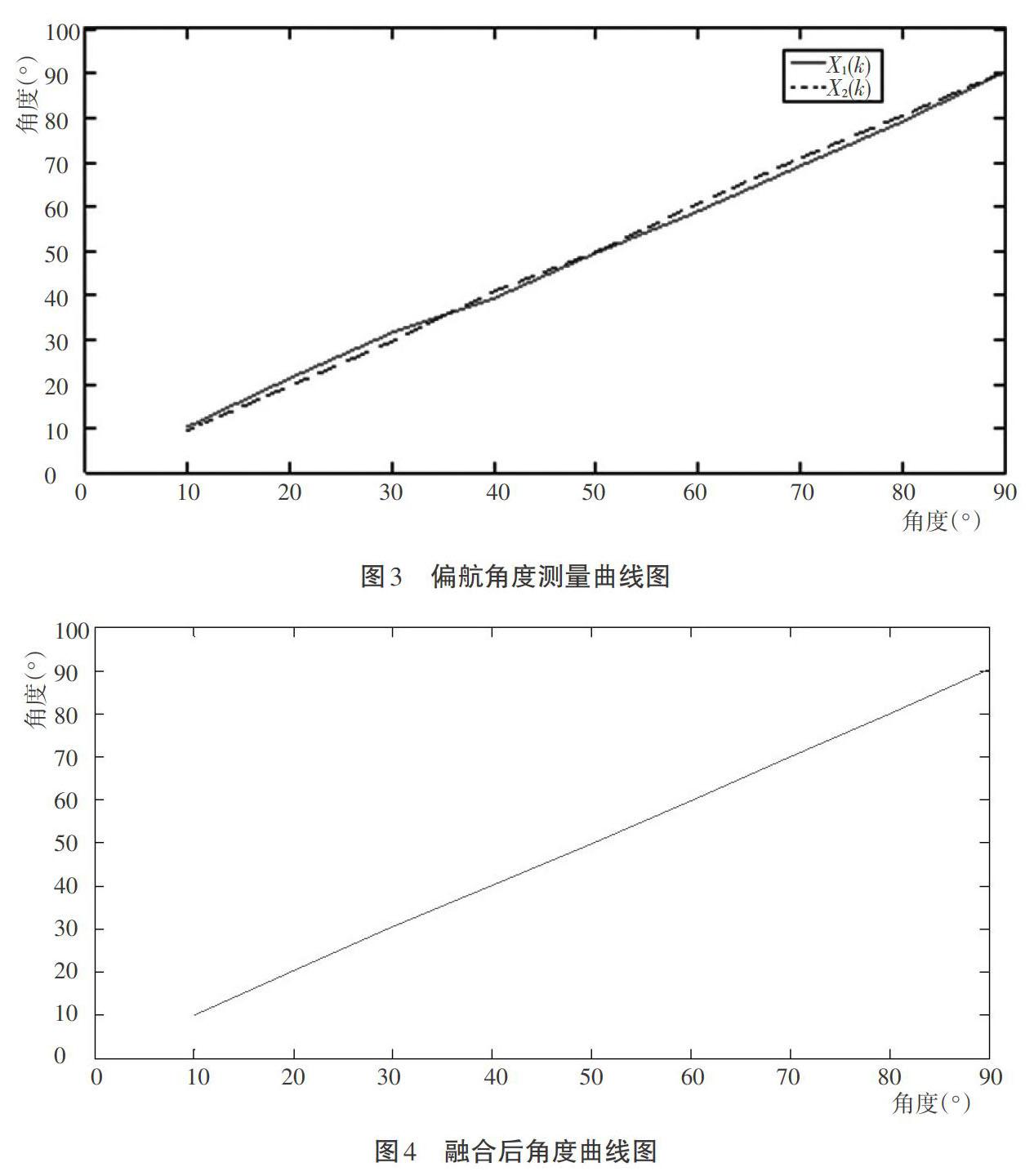
在履帶式機器人車體上安裝有傳感器,車體兩側各裝有2個測距傳感器,在車體中心線上裝有2個用于測量姿態的角度傳感器。為驗證算法的正確性,對角度傳感器采集到的數據進行融合,讓機器人偏航10°、20°、30°、40°、50°、60°、70°、80°、90°。表1為部分測量數據和融合結果。
其中:k表示測量序號;[X1k]、[X2k]為角度傳感器的測量數據;[W1k]、[W2k]為對應的權值;[X∧]為自適應加權融合結果。由表中數據得出,傳感器的檢測精度越高,對應的加權因子也較高。對表中數據進行繪圖,結果如圖3、圖4所示。
圖3中,[X1k]、[X2k]表示車體每次偏航10°傳感器的測量數據。
圖4中是把2個傳感器測量值融合后得到的[X∧]的數據曲線圖。從圖中可知,經融合算法后得到的數據很接近真值,誤差較小。實驗結果表明,該算法提高了檢測的精度,得到了比較精確的數據。
4 結語
本設計以履帶式變形機器人為平臺,利用多傳感器信息融合算法技術,對傳感器融合模型進行分析。最后,通過仿真實驗,驗證了該算法的正確性。
參考文獻:
[1]彭多亮.多傳感器多源信息融合理論及應用[M].北京:科學出版社,2010.
[2]楊丹,劉小平,胡凌燕.基于多傳感器信息融合的機器人姿態測量系統[J].計算機工程與設計,2016(6):1681-1686.
[3]康健.基于多傳感器信息融合關鍵技術的研究[D].哈爾濱:哈爾濱工程大學,2013.
[4]羅彬.基于多傳感器信息融合的移動機器人控制[D].上海:東華大學,2016.
猜你喜歡
電腦知識與技術(2017年4期)2017-04-10 07:18:48
電子技術與軟件工程(2016年16期)2017-03-17 00:34:04
現代電子技術(2016年24期)2017-01-19 14:56:30
計算機應用(2016年12期)2017-01-13 20:34:22
現代電子技術(2016年22期)2016-12-26 09:49:39
電腦知識與技術(2016年12期)2016-06-14 01:29:49
科技視界(2016年14期)2016-06-08 13:24:00
現代電子技術(2015年14期)2015-07-22 22:03:52
物聯網技術(2015年5期)2015-07-18 13:08:22
現代電子技術(2014年24期)2014-12-18 11:53:51
