電驅移動機器人多變量固定時間連續編隊控制
2020-08-03 10:06:00李艷東趙麗娜
計算機工程與應用 2020年15期
李艷東,朱 玲,郭 媛,于 穎,趙麗娜
1.齊齊哈爾大學 計算機與控制工程學院,黑龍江 齊齊哈爾 161006
2.齊齊哈爾大學 機電工程學院,黑龍江 齊齊哈爾 161006
1 引言
由于保持編隊的一組移動機器人在很多領域的有用性,世界上很多研究者關注這一領域,并提出了多種不同的編隊控制策略,如基于行為的控制[1]、虛擬結構法[2]及領航者-跟隨者法[3-4]等,其中領航者-跟隨者法是最常用的機器人編隊控制方法。傳統的編隊控制[5-7]通過設計一個運動學控制器來保持編隊,需滿足“完美的速度跟蹤”假設,其缺乏對擾動等不確定性的魯棒性。為克服不確定性的影響,就必須考慮機器人的動力學,文獻[8-10]已經包含了跟隨機器人的動力學模型,以驅動器力矩作為控制輸入,但實際應用中,機器人以直流電機作為驅動器,以驅動器電壓作為輸入更合理[11],因此本文編隊控制的研究將考慮含驅動器動力學的模型作為研究對象。
在一些實際應用中,比如軍事、災后救援、運載等領域,要求一組機器人在一定時間內達成期望的編隊,而文獻[12-13]等設計的有限時間控制器收斂速度受初始條件限制,初始條件變化將直接影響控制器鎮定時間,無法實現這一愿望。Polyakov[14]開創的固定時間問題的研究,為解決這一問題帶來了希望,釋放了初始條件,通過控制器常數參數的人為設計就能決定機器人編隊的達成時間,這就涉及到了固定時間編隊控制問題。文獻[15-17]將針對一階、二階標量系統的固定時間設計框架用到了多智能體系統一致控制上,然而,這些文獻都是采用將多變量系統解耦成包含單輸入通道的控制問題,然后再通過標量系統的固定時間設計框架進行設計,直到現在針對多變量多輸入系統的固定時間控制問題進行設計的文獻也不多見[18];此外,針對非完整移動機器人,并考慮以驅動器電壓作為控制輸入且克服外部干擾的情況,因變量之間的耦合,增加了設計的困難性,采用多變量固定時間設計框架進行編隊控制設計將更有意義。
針對多變量系統抗干擾固定時間控制設計可以采用開關控制,但因為輸入的頻繁動作,存在抖振現象,不利于系統實際應用,文獻[19-20]提出的多變量連續類超螺旋固定時間算法很好地解決了開關控制輸入抖振的問題,受此啟發,本文將采用連續類超螺旋固定時間算法用到受外部干擾的移動機器人編隊控制中。綜合上面的分析,本文將研究一隊受外部干擾作用的電驅動非完整移動機器人的多變量固定時間連續編隊控制問題。
2 原理
2.1 非完整移動機器人模型
電驅動非完整移動機器人的數學模型如下[11]:
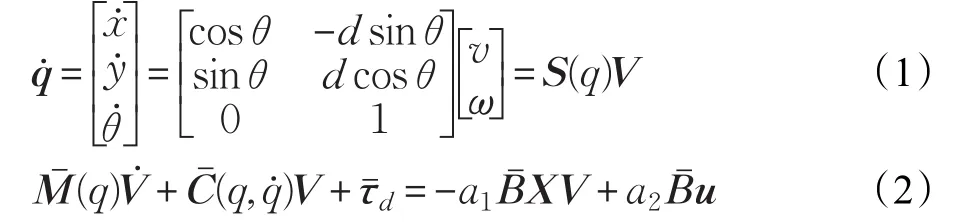
其中q=(x,y,θ)T為機器人的姿態向量,(x,y)表示后軸中點c在笛卡爾坐標系中的坐標,θ為機器人的導向角。兩驅動輪的間距為2R,驅動輪的半徑為r。v和ω分別為移動機器人的線速度和角速度,Mˉ(q)為系統慣性矩陣,是與位置和速度有關的向心力和哥氏力矩陣,是僅與輪距R和輪半徑r有關的非奇異矩陣,為外部擾動,,ur與ul是加在右輪和左輪電機的輸入電壓,d是機器人后軸到前部的距離。其中矩陣:

其中,m是移動機器人平臺質量,I為機器人平臺繞輪軸的轉動慣量,為速度與左右驅動輪速度的關系矩陣,a1=N2KTKb/Ra與a2=NKT/Ra為參數;N為電機齒輪與機器人驅動輪上齒輪的齒輪比,KT為電機轉矩常數,Ra為電阻,Kb是反電動勢系數。
2.2 領航者跟隨者編隊動力學模型
考慮如圖1所示相對距離為lij,相對方位角為ψij的兩個受非完整約束的領航者-跟隨者機器人系統。
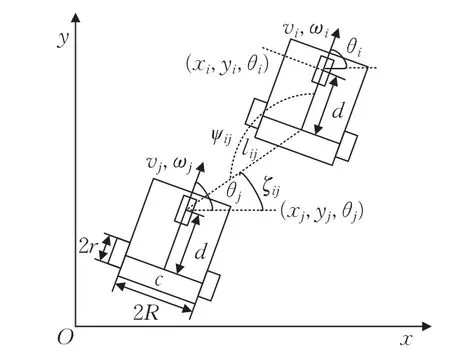
圖1 領航者-跟隨者機器人系統
由圖1可以得到:
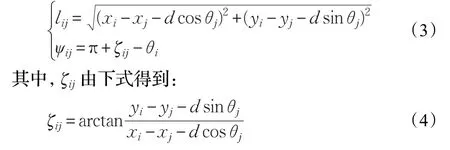
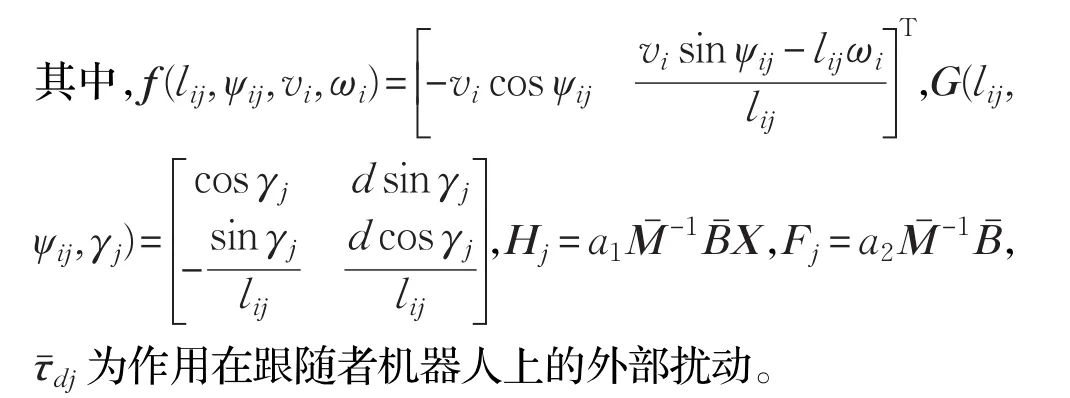
則編隊系統的運動學如下[21]:

其中,γj=ψij+θij,θij=θi-θj。
注1如無特殊說明,下標i代表領航者參數,下標j代表跟隨者參數,本文中j取1,2,即兩臺跟隨者。
由式(2)、(5)可以得到考慮驅動器動力學的領航者跟隨者編隊狀態空間動力學方程如下:

2.3 固定時間控制
在編隊控制器設計之前,先介紹幾個需要用到的引理和定義。
定義1[17-18]對于系統:

定義2[17-18]如果系統(8)是全局有限時間穩定,而且設定時間函數T(x0)是有界的,即>0,T(x0)≤Tmax,那么系統(8)在原點固定時間穩定。
引理1[18]如果存在一個Lyapunov函數,且對于參數α,β>0,p>1>q>0,其解滿足不等式:

那么原點是固定時間穩定的,其設定時間函數有可以由設定常數計算出的界,即:

引理2[18]對于一個一階多變量系統:

其中,x∈?n,α,β>0,p>1>q>0,那么,系統(11)在原點是全局固定時間穩定的,且設定時間估計由式(10)給出。
3 控制器設計
控制器設計分兩部分,第一部分進行編隊跟蹤部分的設計,采用固定時間編隊控制算法,使跟隨者在不依賴初始條件的情況下,通過設計參數的選擇在固定時間內達到指定的編隊隊形;第二部分針對跟隨者機器人所受有界不確定干擾情況,依據機器人電驅動動力學模型進行抗干擾的固定時間動力學電壓控制器設計。
3.1 固定時間編隊控制問題
電驅動非完整移動機器人領航者-跟隨者法固定時間控制的目標就是通過設計編隊控制器、動力學電壓控制器使:

其中,lijd與ψijd分別為跟隨機器人與領航機器人的相隔距離與相對方位角的期望值,Vjc為跟隨者機器人的期望速度。本文主要關注跟隨者機器人,給出如下假設。
假設1作用在跟隨者機器人上的擾動有界,即≤ρj,ρj為正常數,其導數存在且有界,即L,L為正常數。
假設2領航者機器人跟蹤一個提前定義的時變軌跡。
假設3跟隨者機器人可以獲得所有自身的狀態和領航者機器人的速度。
3.2 固定時間運動學領航者-跟隨者編隊控制器
對于編隊運動學系統(6),控制輸入Vj=[vjωj]T,既然detG=d/lij≠0,G-1存在,假定期望的距離lijd和方位角ψijd是時不變的,使用狀態反饋技術可以得到多變量固定時間運動學編隊控制器(MFTFC)如下:


定理1對于多變量一階系統(6),設計編隊運動學控制器(13),那么編隊跟蹤偏差ej在設定時間函數T0內收斂到0,跟隨者在通過控制器參數設計的設定時間T0內實現編隊跟蹤,時間T0與系統狀態無關。
令 y0=≥0 ,有,式(17)則變為,則由引理1,式(17)在固定時間式(15)所示時間T0內收斂到原點,即系統(6)中的lij、ψij在固定時間內達到lijd、ψijd,實現指定編隊,或者依據引理2,由運動學編隊跟蹤偏差微分方程(14)直接得到上述結論。證畢。
3.3 超螺旋固定時間動力學連續電壓控制器
前面設計解決了編隊運動學層面的固定時間編隊控制問題,以設計速度控制器作為輸入,可以實現跟隨者在固定時間與領航者達到指定編隊,但實際使用中,跟隨者機器人必然受到外部干擾的影響,因此,在干擾存在的情況下,應考慮機器人動力學模型,這里,將編隊控制得到的速度作為動力學(7)的期望速度輸入,進行抗干擾的超螺旋固定時間動力學連續電壓控制器設計,定義速度跟蹤誤差:

結合式(7)和(18)可以得到速度跟蹤誤差微分方程如下:
對于輸入量Uj,基于文獻[20]的多變量類超螺旋固定時間控制方法進行的固定時間控制器設計如下:

其中,p1>1,那么,閉環系統動力學有如下形式:

定理2對于存在干擾ξ(t)的動力學系統(22),≤L,那么,ejc和y在固定時間T1內收斂于原點,即跟隨者機器人實現速度跟蹤并克服外部干擾τˉdj。
定理2證明見文獻[20]。
通過變量替換可以得到基于多變量超螺旋固定時間算法的跟隨者機器人動力學固定時間連續電壓控制器(MSTFTC)如下:
定理3對形如動力學方程(7)的電驅動跟隨者機器人j,假設1~3同時滿足,設計跟隨者機器人驅動器電壓控制器(24),那么跟隨者機器人速度跟蹤偏差ejc在設定時間T1(式(23))內收斂到0,跟隨者在通過控制器參數設計的設定時間T1內實現動力學速度跟蹤,時間T1與系統狀態無關。
證明由定理2,很顯然定理3成立。
為了進行對比,這里給出跟隨者機器人多變量固定時間魯棒控制器(MFTRC)如下:

其中,α1,β1,p1為設計常數,同式(24),sgn(?)為符號函數,顯然式(25)采用開關控制項來克服干擾,為非連續控制。
進一步,通過變量替換得到跟隨者機器人多變量固定時間魯棒電壓控制器(MFTRUC)如下:
注2機器人編隊在T0max內達到期望編隊,跟隨者在T1max內實現速度跟蹤,取T=max(T0max,T1max),則通過設計控制參數可以實現存在擾動情況下機器人編隊在T內達到期望編隊。
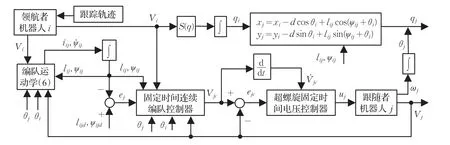
圖2 電驅動移動機器人多變量固定時間連續編隊控制結構圖
4 仿真與結果分析
文中所設計的電驅動移動機器人多變量固定時間連續編隊控制算法(MFTFC+MSTFTC)框圖如圖2所示,通過MATLAB/SIMULINK對所提出算法進行仿真分析,三臺非完整移動機器人組成三角編隊(lijd=1,ψijd=±120°)作為研究對象,取編隊機器人模型物理參數完全相同如表1所示。
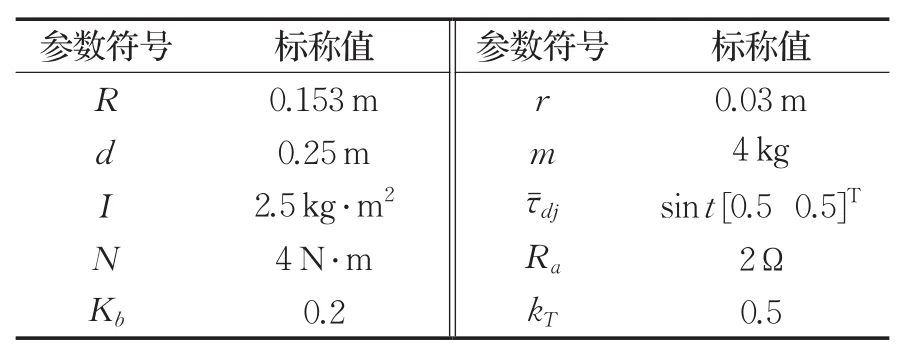
表1 機器人系統模型物理參數
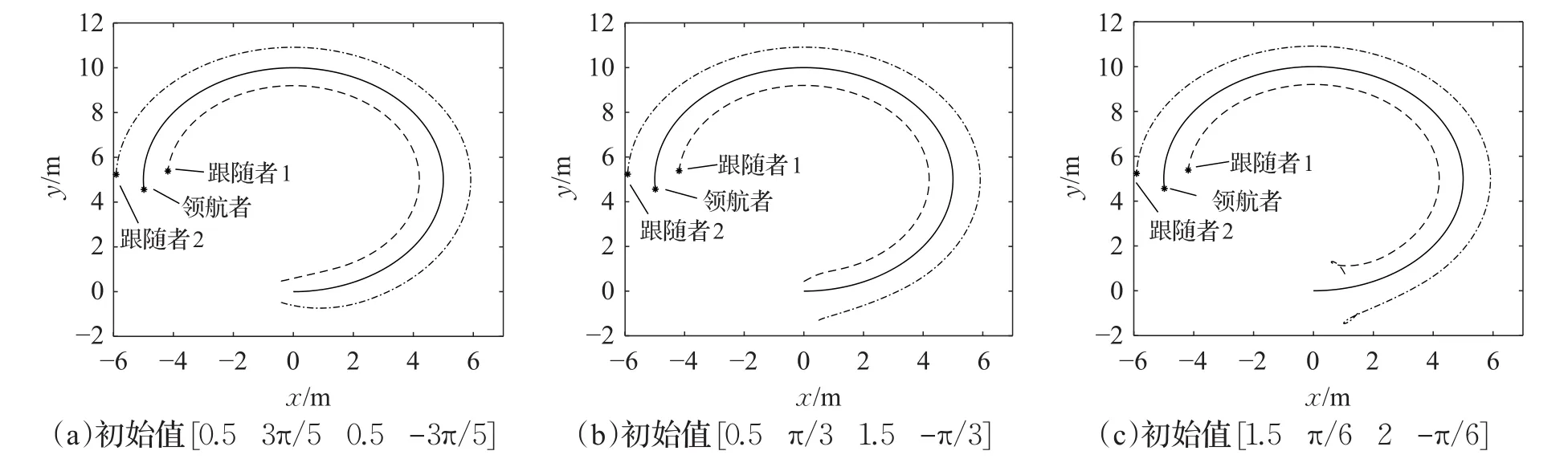
圖3 三角編隊圓形軌跡跟蹤
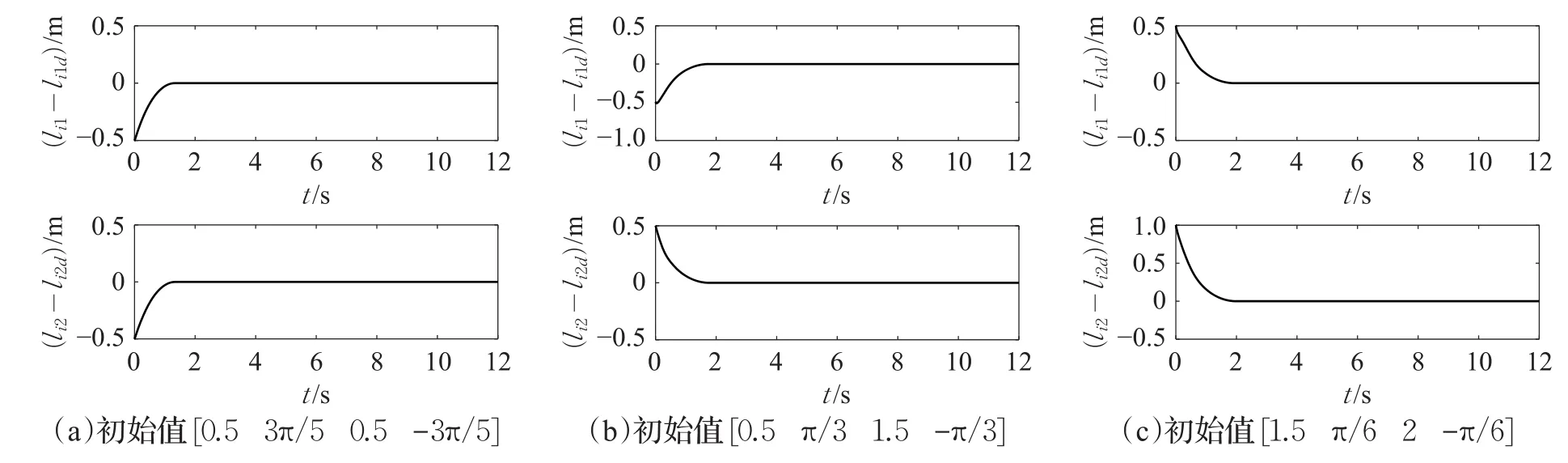
圖4 跟隨者與領航者相對距離跟蹤偏差
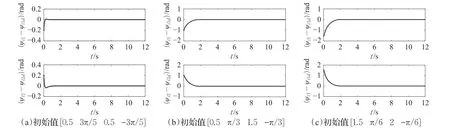
圖5 跟隨者與領航者方位角跟蹤偏差
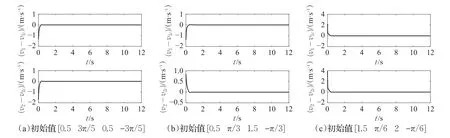
圖6 跟隨者速度跟蹤偏差
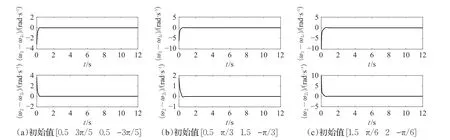
圖7 跟隨者角速度跟蹤偏差
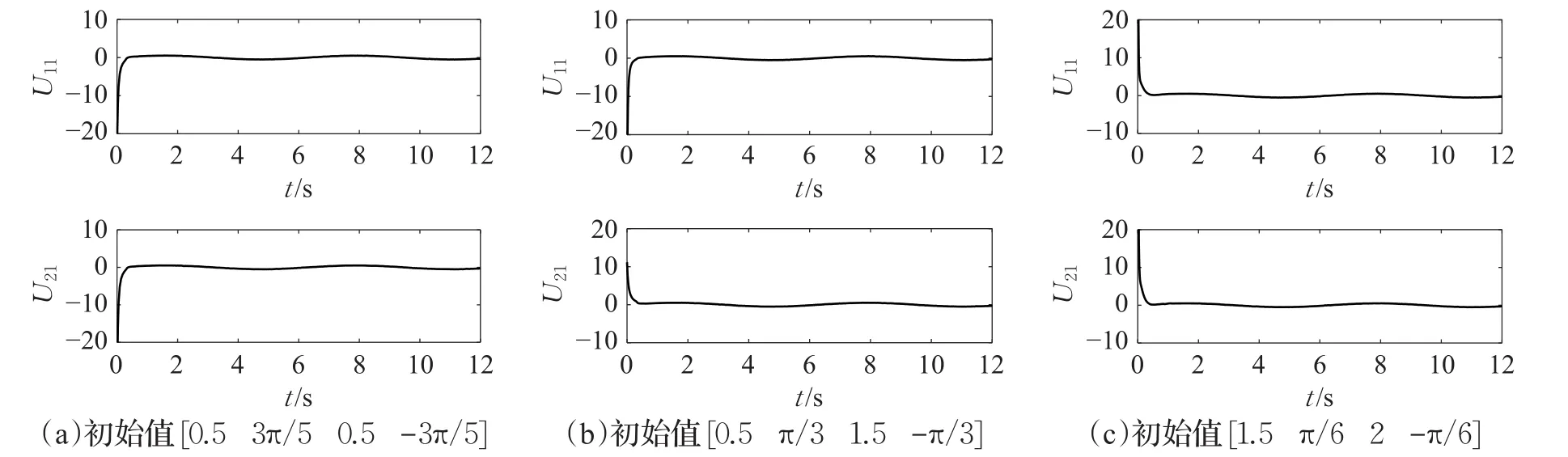
圖8 跟隨者輸入Uj1(MFTFC+MSTFTC算法)
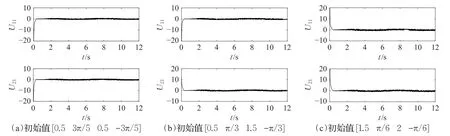
圖9 跟隨者輔助輸入Uj1(MFTRC+MFTRUC算法)
(1)領航者與跟隨者相對編隊初始位姿差[0.5 3π/5 0.5-3π/5],采用MFTFC+MSTFTC算法的仿真結果如圖3~圖8的(a)圖所示,采用MFTRC+MFTRUC算法的仿真結果如圖9(a)所示(限于篇幅,此算法只給出輔助輸入Uj1用于比較研究)。
(2)領航者與跟隨者相對編隊初始位姿差[0.5 π/3 1.5-π/3],采用MFTFC+MSTFTC算法的仿真結果如圖3~圖8的(b)圖所示,采用MFTRC+MFTRUC算法的仿真結果如圖9(b)所示。
(3)領航者與跟隨者相對編隊初始位姿差[1.5 π/6 2-π/6],采用MFTFC+MSTFTC算法的仿真結果3~圖8的(c)圖所示,采用MFTRC+MFTRUC算法的仿真結果如圖9(c)所示。
在參數的選取上,可以看出三種軌跡跟蹤情況參數一致,領航者與跟隨者相對編隊初始位姿差不同,即初始條件不同,從仿真結果圖3~圖7(MFTFC+MSTFTC算法)中的(a)~(c)圖可以看出,三種情況都實現了較好的跟蹤,克服了滿足假設條件干擾的影響,且幾乎在相同的時間(通過控制器參數設計的設定時間)跟隨者機器人達到了期望編隊位置,跟隨者機器人實現了對期望速度的跟蹤,說明控制效果與初始條件無關,實現了固定時間控制。
在公共參數相同的情況下,三種軌跡跟蹤情況,采用 MFTFC+MSTFTC 算法的圖 8的(a)~(c)和采用MFTFC+MFTRUC算法的圖9的(a)~(c)跟隨者輔助輸入Uj1的對比可以看出,連續控制的超螺旋固定時間算法(MFTFC+MSTFTC)消除了輸入抖振現象,開關控制的固定時間魯棒控制算法(MFTFC+MFTRUC)則存在明顯的抖振現象,不利用實際應用。
5 結束語
文章研究了多機器人的編隊控制問題,基于l-ψ領航者-跟隨者控制結構提出了電驅動非完整移動機器人固定時間連續編隊控制算法。依據領航者-跟隨者編隊動力學狀態空間模型設計的多變量固定時間編隊控制,以及在動力學層面,以驅動器電壓作為控制量設計的多變量超螺旋固定時間連續電壓控制。通過調整設計常數參數,而無需關注機器人初始狀態就能夠使跟隨者機器人在固定時間內與領航者機器人保持期望編隊,且在克服有界干擾的情況下,實現了固定時間內對理想速度的跟蹤。在跟隨者機器人存在干擾情況下,對三臺機器人組成的三角編隊以多種初始條件情況跟蹤圓形軌跡進行了仿真實驗,并與開關控制的魯棒固定時間控制算法進行了對比。仿真實例及分析較好地說明了所提算法的有效性及連續控制消除輸入抖振的優越性,從而增加了編隊機器人在干擾存在情況下對達成編隊有時間要求場合的實用性。對于機器人編隊同時存在負載變化、摩擦及外部干擾等多不確定性的情況,將是進一步研究的內容。
猜你喜歡
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
四川輕化工大學學報(自然科學版)(2021年3期)2021-08-30 06:37:02
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
制造技術與機床(2017年3期)2017-06-23 08:11:21
Coco薇(2017年5期)2017-06-05 08:53:16
智能系統學報(2015年4期)2015-12-27 09:38:35
中國海洋大學學報(自然科學版)(2014年8期)2014-02-28 12:21:31
