基于OpenCV的四自由度骨科打孔機器人設計
2020-08-09 08:37:37張美玉臧琛
現代商貿工業 2020年25期
關鍵詞:機械臂
張美玉 臧琛
摘要:本文設計了一種可根據骨科打孔手術的要求,基于OpenCV視覺定位的,可實現空間映射、路徑規劃、路徑定位、定點打孔等4個方面的智能骨科打孔機器人模型,對其四自由度機械臂運動系統的結構方案進行了設計,討論了該機械臂的運動結構,為機械臂的運動分析、控制及軌跡規劃的研究提供了可靠的依據。
關鍵詞:骨科機器人;四自由度;機械臂
中圖分類號:TB文獻標識碼:Adoi:10.19311/j.cnki.16723198.2020.25.075
0引言
進入21世紀以來,受社會經濟發展迅速、人口老齡化程度的加深的影響,我國醫療行業手術數量日益增高,需要手術治療的患者日益增多。由于手術機器人在微創手術、精確定位操作等方面的優勢以及其對傳統醫學促進的作用,手術機器人逐漸成為智能化醫療新技術的典范,也成為機器人研究領域的焦點之一。由手術機器人衍生出的骨科機器人也來逐漸成為骨科手術發展的新方向,催生了諸多新的治療理念和方案。
傳統骨科手術的核心難點在于受醫生視野和操作的限制,手術損傷難以避免,且因手術操作難度較大,使其已不能完全適應時代發展需求,臨床亟需新的治療理念、手段和設備來滿足骨科疾病治療的需求。本論文設計的四自由度骨科打孔機器人模型在滿足人們對精準、微創、智能需求的前提下基于OpenCV視覺定位進行手術路徑規劃和定位打孔,能完成包括空間映射、路徑規劃、路徑定位、定點打孔等4個方面功能,簡化其機械結構,從而成本更低、器材耐久性強、操作簡單,具有很強的現實意義。
1系統結構與工作原理
基于OpenCV的四自由度智能骨科打孔機器人主要由機械系統、傳感系統、控制系統三大系統構成,三大系統又分為六個部分分別為:一是驅動部分;二是視覺部分;三是機械結構部分;四是人機交互部分;五是手術計劃部分;六是控制軟件部分。
其工作原理是骨科打孔機器人利用空間映射建立三維坐標系,在視覺感知系統下自動從術前圖像獲取定位,建立手術器械、手術中圖像和患者空間坐標的定位,結合醫生拖動的粗定位和機器人自動的精確定位,實現安全準確的手術打孔定位,再通過路徑規劃將目標規劃路徑傳遞給機器人,在醫生的監視下通過從操作方式或者以全自動的方式遙控機器人完成相應手術的操作。
2機械系統設計方案
2.1機器人的結構設計
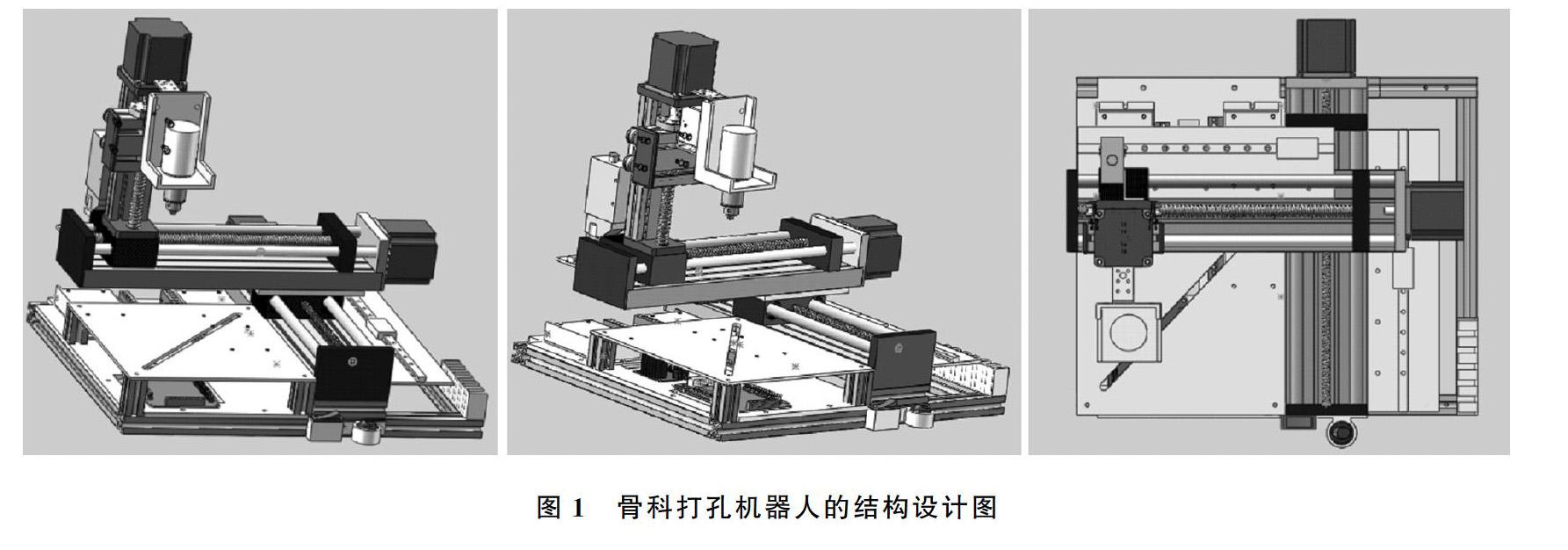
骨科打孔機器人的結構設計如圖1所示。固定底板是整個機體的基礎,上面設有框架結構的操作臺、縱向水平支架、橫向水平支架、垂直軸支架以及打孔裝置,其中縱向水平支架、橫向水平支架、垂直軸支架以及打孔裝置共同構成了骨科打孔機器人的機械臂。
機器人機械臂通過固定底板上的縱向水平支架和橫向水平支架進行水平方向兩個直線方向的運動,機械臂上打孔裝置的豎直運動能過安裝在機械臂橫向水平支架末端的垂直軸直架完成,每組水平和垂直運動構成機器人打孔裝置的一個運動面。各運動面的移動旋轉動力由三個步進電動機和一個舵機來提供,三個步進電動機可以為機器人的移動提供足夠的動力,保證移動速度和精度,并且可以通過三個步進電動機的互相配合達到到達指定空間坐標位置的目的。為了便于醫生進行粗定位,設計了框架結構的操作臺以確定手術中手術者所處的位置,操作臺上設有標尺,標尺共有兩組標記點,在患處正、側位圖像采集時用于定位患處正、側位的空間標記,以完成精確的空間定位。
2.2機械臂自由度的選擇
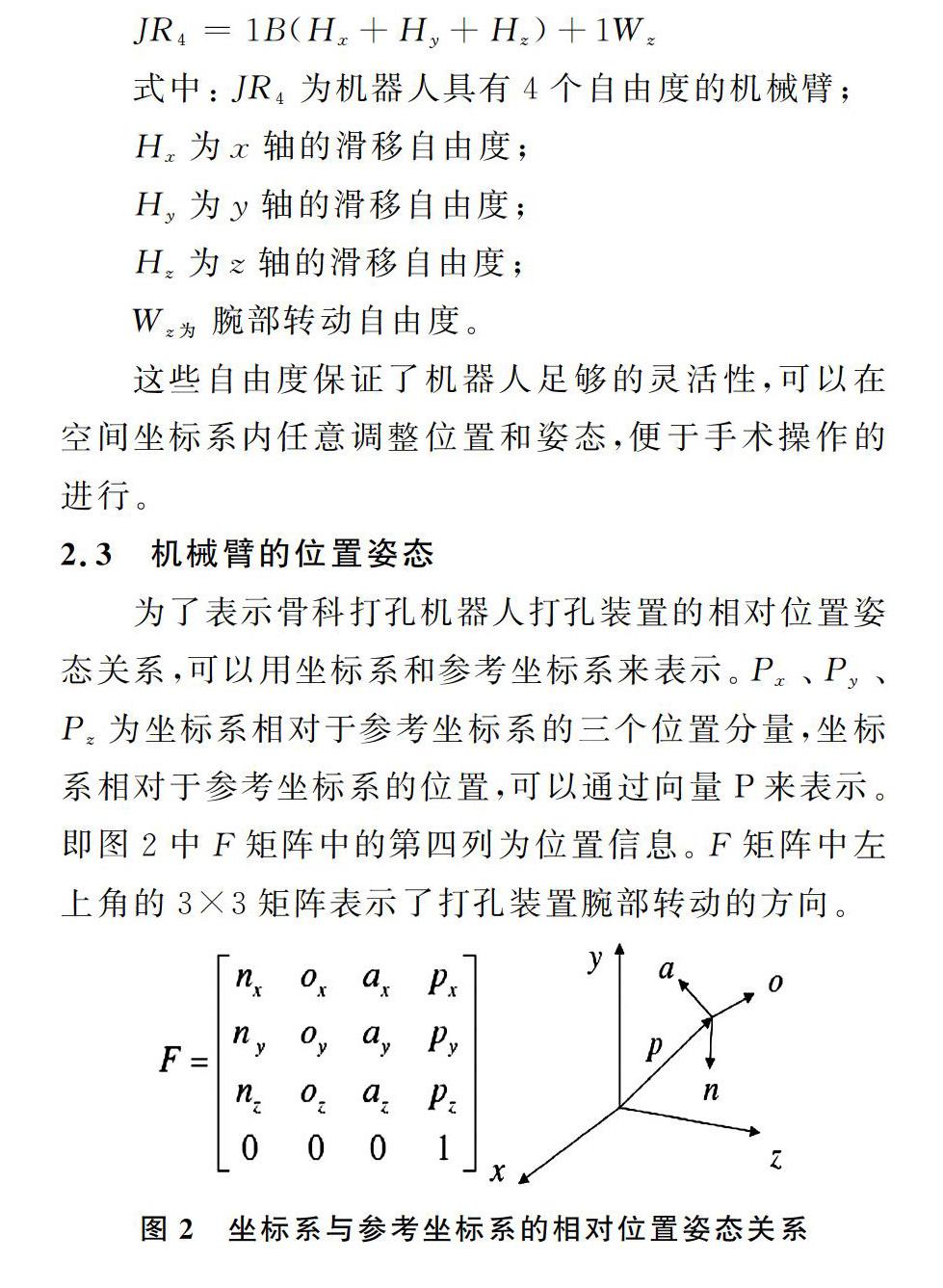
機械臂支架除是骨科打孔機器人的整體支撐外,還主要用于調整骨科機器人打孔裝置位置和姿態,使機器人打孔裝置和患者患部處于同一個合理、精確的空間分布位置。因此,打孔裝置的位置和姿態是機械臂末端執行的動作,因此骨科打孔機器人具備以下4個基本自由度:x軸方向的左右滑移、Y軸方向的前后滑移,Z軸方向的上下滑移,打孔裝置(腕部)的轉動。運動系統的結構組合式為:
這些自由度保證了機器人足夠的靈活性,可以在空間坐標系內任意調整位置和姿態,便于手術操作的進行。
2.3機械臂的位置姿態
為了表示骨科打孔機器人打孔裝置的相對位置姿態關系,可以用坐標系和參考坐標系來表示。Px、Py、Pz為坐標系相對于參考坐標系的三個位置分量,坐標系相對于參考坐標系的位置,可以通過向量P來表示。即圖2中F矩陣中的第四列為位置信息。F矩陣中左上角的3×3矩陣表示了打孔裝置腕部轉動的方向。
3控制系統設計方案
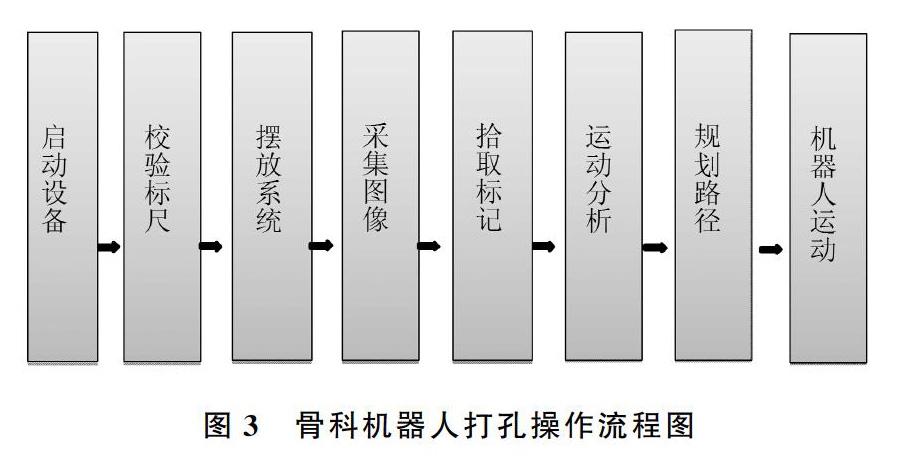
控制系統的設計主要分為兩部分:一部分是機器人的“大腦”,它主要進行后臺處理,負責完成圖像采集、手術路徑的計算和規劃,并負責完成手術過程中導針的導航定位。另一部分是機器人的“手臂”,它是系統的執行部件,是一雙可多維度移動的機械臂,“手臂”負責手術路徑的最后輸出。手術過程中“大腦”和“手臂”通過互相配合來輔助醫生完成手術,主要結合了人機協同操作的想法,實現了主-從式操作骨科機器人的目標,即當機器人距離操作目標較遠時,由醫生拖動機械臂到達目標附近進行精定位,再由機械臂在小范圍內進行高精度自主定位,顯著提升了機器人的操作效率。骨科機器人打孔的內部工作流程如圖3所示。
4結語
本文骨科打孔機器人的設計與制作本著降低成本、便于操作、易于控制的目的,對傳統的骨科打孔機器人的結構與操作模式進行了創新,設計了四個自由度的機械臂,并通過OpenCV技術實現視覺精確定位和路徑規劃,并可以在手術前模擬仿真手術過程,具有良好的適應性與實用性,減少傳統骨科手術醫生操作安全性差的問題,減少醫生操作時的精神壓力,提高手術精度的問題,為現代化的骨科打孔手術提供了一個新的嘗試的探索。
參考文獻
[1]蔡佳成,吳海濤.基于四自由度的鋁錠堆垛機械手的結構設計與運動學分析[J].機械制造,2014,52(03):2932.
[2]劉江南.四自由度機械手軌跡規劃算法與應用研究[D].哈爾濱:哈爾濱工業大學,2015.
[3]田偉.骨科機器人研究進展[J].骨科臨床與研究雜志,2016,1(01):5557.
[4]曾田勇.骨科機器人導航定位系統輔助股骨頸骨折空心螺釘內固定術的應用[J].中國醫療設備,2015,30(08):111113.
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
