
某無人機光電載荷掛架結(jié)構(gòu)設(shè)計
2020-08-16 10:26:39閆修楊竣博賀旭東
西部論叢 2020年5期
閆修 楊竣博 賀旭東
摘 要:根據(jù)光電載荷的技術(shù)特征和使用特點,結(jié)合無人機結(jié)構(gòu)設(shè)計準則,開展了光電載荷掛架的結(jié)構(gòu)技術(shù)研究,從結(jié)構(gòu)布局、材料選擇和裝配工藝等方面進行了工程設(shè)計。采用有限元仿真分析方法對結(jié)構(gòu)進行靜強度、剛度校核,結(jié)果表明結(jié)構(gòu)強度、剛度設(shè)計均滿足使用要求。
關(guān)鍵詞:光電載荷,結(jié)構(gòu)設(shè)計有限元仿真
1引言
隨著無人機技術(shù)的發(fā)展,多種形式的無人機應(yīng)用到農(nóng)業(yè)領(lǐng)域。除了目前已廣泛流行的植保無人機外,搭載光學(xué)傳感器采集農(nóng)業(yè)信息、監(jiān)測作物狀況的無人機也開始在精準農(nóng)業(yè)應(yīng)用領(lǐng)域展現(xiàn)優(yōu)勢。光電傳感器吊艙是無人機一項非常重要的裝備,旨在實現(xiàn)無人機偵察和監(jiān)測功能,同時能夠完成目標捕獲及識別、目標測距、著陸導(dǎo)引等功能[1]。無人機的偵察和監(jiān)測性能取決于平臺的結(jié)構(gòu)、伺服系統(tǒng)穩(wěn)定精度及跟蹤精度[2]。因此,除了對機載光電設(shè)備關(guān)鍵技術(shù)進行研究之外,對其掛裝結(jié)構(gòu)進行應(yīng)用研究也具有一定的現(xiàn)實意義。
2設(shè)計要求
無人機光電載荷掛架的設(shè)計要求如下:
1)載荷掛架應(yīng)具有足夠的強度,能承受光電設(shè)備的靜載荷和沖擊載荷;
2)載荷掛架應(yīng)具有足夠的剛度,滿足光電設(shè)備的精度性能要求;
3)在設(shè)計壽命周期內(nèi),載荷掛架應(yīng)能在惡劣的氣象環(huán)境下穩(wěn)定可靠的工作;
4)掛架應(yīng)遵循輕量化設(shè)計原則,盡可能減輕結(jié)構(gòu)重量;
5)掛架應(yīng)具有簡單的裝配工藝,減少外場試驗的安裝工序。
3結(jié)構(gòu)設(shè)計
3.1光電載荷掛架組成
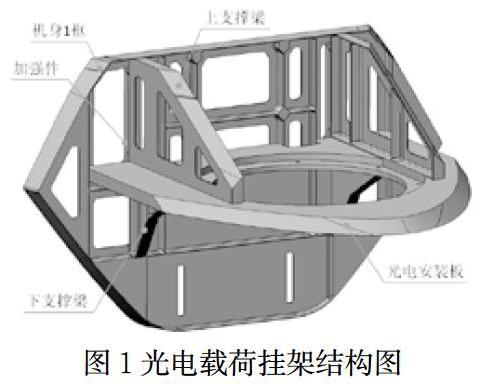
光電載荷布置在無人機機頭位置,載荷掛架位于機身1框前端,并與機身1框和機頭罩相連接。載荷掛架由光電安裝板、上支撐梁、下支撐梁和加強件組成,關(guān)于機身中心面左右對稱,結(jié)構(gòu)如圖1所示。光電載荷通過周圈螺釘固定在安裝板下表面,光電安裝板通過上、下支撐梁將載荷傳遞到機體結(jié)構(gòu)上。安裝板頭部與機頭罩相連接,用于增強整個結(jié)構(gòu)的穩(wěn)定性,減小結(jié)構(gòu)撓度。
3.2 結(jié)構(gòu)形式和材料選擇
光電安裝板用于掛載光電吊艙,中部圓環(huán)的底面為連接面,將光電吊艙的重力和慣性力傳遞到上、下支撐梁。安裝板為整體機加件,后部與機身1框(7050鋁合金板材)連接,增強整個結(jié)構(gòu)的橫向穩(wěn)定性。由于無人機發(fā)動機運行、姿態(tài)急劇變化、氣流擾動等原因產(chǎn)生的振動,安裝板疲勞問題較為突出,因此選用抗疲勞性能好的2A12-T4鋁合金板材[3]。
上、下支撐梁是主要的縱向受力構(gòu)件,將安裝板傳來的光電吊艙縱向載荷和彎矩傳遞到機身骨架上,呈“[”字形,采用2A12-T4鋁合金板材機加成形。
加強件為槽形件,連接機身1框和上支撐梁,用于將上支撐梁的縱向載荷傳遞至機身1框,采用2A12-T4鋁合金板材機加成形。
3.3裝配設(shè)計
加強件與機身1框間無可拆卸要求,作用力以剪力為主,選用鉚釘連接。
上支撐梁、下支撐梁與光電安裝板間作用力以拉壓為主,選用螺栓連接。
上支撐梁、下支撐梁及光電安裝板與機身1框間采用螺栓連接,方便拆裝和維護。
根據(jù)連接面的尺寸限制,確定鉚釘、螺栓連接形式為單排連接,其材料和規(guī)格由受力分析確定。
4有限元分析
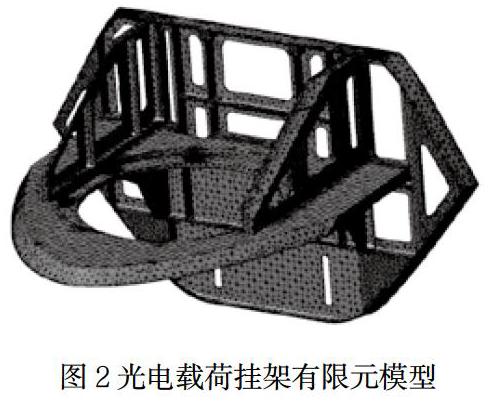
光電載荷掛架是無人機掛載飛行時機頭部位的主要受力部件,其剛強度關(guān)系到飛行安全和探測精度,校核其結(jié)構(gòu)的剛強度尤為必要[4]。依據(jù)光電載荷掛架的結(jié)構(gòu)形式和實際應(yīng)用工況,建立有限元分析模型,對光電載荷掛架在極限載荷工況下的結(jié)構(gòu)強度和剛度響應(yīng)進行有限元仿真校核分析。
4.1結(jié)構(gòu)材料
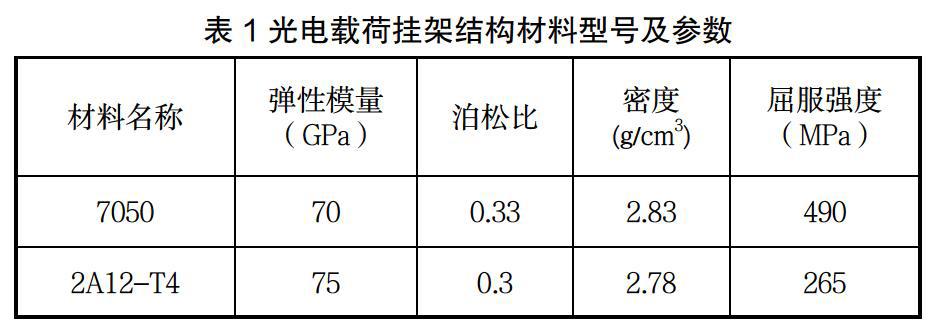
光電載荷掛架結(jié)構(gòu)主要由鋁合金板材組成,其型號及材料參數(shù)如表1所示。
4.2載荷工況
無人機掛載飛行整個階段包含地面滑行、起降、爬升、平飛、陣風(fēng)、滾轉(zhuǎn)、俯仰等工況,光電吊艙的載荷系數(shù)為-1~3。以系統(tǒng)在下沉陣風(fēng)、上升陣風(fēng)、著陸等工況條件下載荷系數(shù)(向上1g載荷,向下3g載荷)為計算載荷,計算掛架的應(yīng)力水平以及掛架變形所引起的安裝面傾斜角度。
4.3仿真分析結(jié)果
光電載荷掛機的靜強度仿真計算結(jié)果表明:在上述載荷工況下,兩種載荷系數(shù)下整個結(jié)構(gòu)的最大應(yīng)力分別為:82.7MPa和248.2MPa,最大應(yīng)力出現(xiàn)在機身1框位置,安全裕度0.31,除1框外的其他結(jié)構(gòu)件上,最大應(yīng)力分別為57.5MPa和172.6Mpa,安全裕度0.02,應(yīng)力云圖如圖3、圖4所示。掛架的最大位移分別為:0.99mm和2.98mm,如圖5、圖6所示。按光電安裝板長度660mm計算,掛架變形所引起的安裝面傾斜角度約為0.09°和0.26°,滿足技術(shù)指標要求。
5 總結(jié)
采用有限元分析方法對光電載荷掛架結(jié)構(gòu)進行了力學(xué)仿真分析,完成了強度和剛度的校核。
1)仿真分析結(jié)果顯示,掛架的強度和剛度均滿足使用要求;
2)設(shè)計分析方法可為無人機光電載荷掛架設(shè)計提供工程參考。
參考文獻
[1] 馮包根.艦載無人機及其光電吊艙[J].船舶電子工程, 2000(2):56-60.
[2] 甘至宏.光電吊艙內(nèi)框架減振系統(tǒng)設(shè)計[J].光學(xué)精密工程,2010,18(9):2036-2042.
[3] 李濤,秦萌,李向前. 2A12高強度鋁合金的腐蝕性能研究[J].內(nèi)蒙古科技大學(xué)學(xué)報,2011(2):63-65.
[4] 張葆.《航空光電成像平臺關(guān)鍵技術(shù)》專題文章導(dǎo)讀[J].光學(xué)精密工程,2007,15(8):83-88.
作者簡介:閆修(1992.1—),男,漢族,安徽阜陽人,中國電子科技集團公司第三十八研究所,助理工程師,碩士學(xué)位,研究方向為無人機結(jié)構(gòu)設(shè)計。
猜你喜歡
建材發(fā)展導(dǎo)向(2023年6期)2023-03-31 02:51:38
哲學(xué)評論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年13期)2021-07-28 07:15:50
中華詩詞(2019年7期)2019-11-25 01:43:04
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
中國房地產(chǎn)業(yè)(2016年2期)2016-03-01 01:25:23
中國房地產(chǎn)業(yè)(2016年24期)2016-02-16 06:10:22
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50
機械工程師(2015年10期)2015-02-02 01:14:03
機電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
