基于視覺(jué)優(yōu)化的車用攝像機(jī)監(jiān)視器系統(tǒng)CMS
2020-09-02 06:21:23華進(jìn)勇馮會(huì)健
汽車世界·車輛工程技術(shù)(中) 2020年4期
關(guān)鍵詞:安全性
華進(jìn)勇 馮會(huì)健


摘 要:在商用車上,因?yàn)轳{駛室高度及車身尺寸原因,視野盲區(qū)較多,因此必須安裝不同類別的視鏡來(lái)提供車外的視野,而較多數(shù)量的視鏡對(duì)駕駛員對(duì)車外物體識(shí)別是一個(gè)很大的挑戰(zhàn)。在駕駛員將注意力轉(zhuǎn)向一個(gè)物體之前,由于光流的變化,這個(gè)物體通常會(huì)先在他們的邊緣視野中被發(fā)現(xiàn)。目前商用車的后視鏡系統(tǒng)違反了這一原則,駕駛員必須專門觀察某一類視鏡,以便能夠發(fā)現(xiàn)視鏡中的物體。車用攝像機(jī)監(jiān)視器系統(tǒng)(CMS)的應(yīng)用能夠有效改善這種情況,從而顯著提高安全性。本文將基于人眼視覺(jué)感知研究一種車用攝像機(jī)監(jiān)視器系統(tǒng)(CMS)替代傳統(tǒng)后視鏡的方案。
關(guān)鍵詞:中央視覺(jué);邊緣視覺(jué);組合視野;安全性;商用車;CMS:車輛視鏡替代
1 商用車的視野
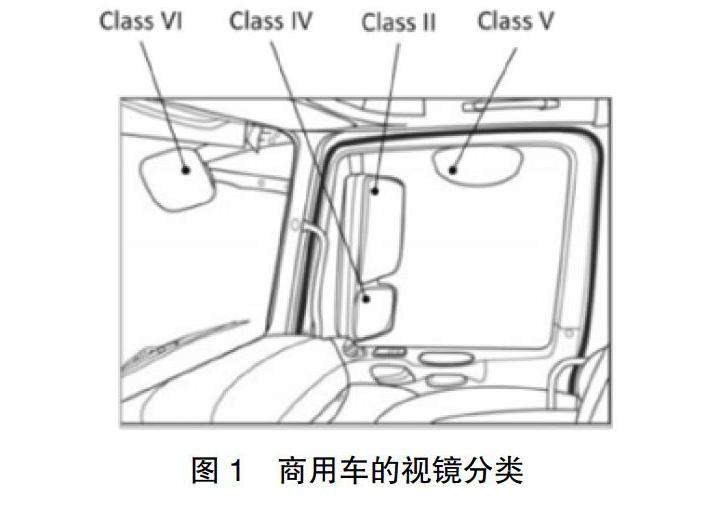
由于駕駛員座位位置較高,商用車的遠(yuǎn)處視野被認(rèn)為是非常理想的,但從駕駛員觀察車輛周圍仍存在較多的盲區(qū)。車輛周圍和后方不可見(jiàn)的區(qū)域只能通過(guò)視鏡看到。根據(jù)我國(guó)現(xiàn)行的GB 15084-2013《機(jī)動(dòng)車輛間接視野裝置 性能和安裝要求》規(guī)定,N2類大于7.5噸和N3類車至少需要安裝六面視鏡。這些鏡子包括兩個(gè)主后視鏡(Class Ⅱ)、兩個(gè)廣角后視鏡(Class Ⅳ)以及乘客側(cè)的一個(gè)補(bǔ)盲鏡(Class Ⅴ)和一個(gè)前視鏡(Class Ⅵ)。圖1顯示了商用車強(qiáng)制安裝的視鏡(乘員側(cè))。視鏡的多樣性和視野的不同增加了駕駛員觀察車輛周圍環(huán)境的困難,駕駛員必須同時(shí)監(jiān)控前方道路和目前強(qiáng)制安裝的6個(gè)視鏡。為了正確獲取車外視野,駕駛員應(yīng)該在什么時(shí)候觀察哪面視鏡將對(duì)行車安全及車外人員的保護(hù)起到非常重要的作用。
2 中央視覺(jué)和邊緣視覺(jué)
人類的視覺(jué)感知可以分為兩種不同的視覺(jué)方式:中央視覺(jué)和邊緣視覺(jué)。這兩種類型結(jié)合起來(lái)形成了一個(gè)強(qiáng)大的整體結(jié)構(gòu),構(gòu)成了人類眼睛對(duì)周圍的感知,即人類的視覺(jué),而攝像機(jī)監(jiān)視器系統(tǒng)替代傳統(tǒng)視鏡的基本要求是根據(jù)這些特征和相關(guān)的認(rèn)知能力規(guī)定的。
眼睛是將光信號(hào)轉(zhuǎn)換成電信號(hào)的器官。這些電信號(hào)然后被傳輸?shù)酱竽X,大腦進(jìn)行圖像處理。從某種意義上說(shuō),人眼可以比作攝像機(jī),大腦可以比作圖形處理單元。攝像機(jī)通過(guò)所謂的像素接收光信號(hào),而在人類視覺(jué)中,這一過(guò)程是通過(guò)位于視網(wǎng)膜上的視錐細(xì)胞(明視覺(jué))和視桿細(xì)胞(暗視覺(jué))進(jìn)行的。與攝像機(jī)相比,這些受體在視網(wǎng)膜上的分布并不均勻。雖然在主視覺(jué)方向(中央視覺(jué))上有非常高濃度的視錐細(xì)胞,但視桿細(xì)胞主要聚集在邊緣,在中央窩中沒(méi)有發(fā)現(xiàn)。來(lái)自中心視線的光落在中央窩上,這是視網(wǎng)膜上一個(gè)非常小的點(diǎn),上面布滿了視錐細(xì)胞。每個(gè)視錐細(xì)胞都與其自己的神經(jīng)通路相連。與視桿細(xì)胞相比,對(duì)顏色敏感的視錐細(xì)胞對(duì)光不敏感,因此需要更多的時(shí)間來(lái)傳遞信號(hào)。中央窩視覺(jué)指的是視覺(jué)中敏銳的區(qū)域,尤其對(duì)圖像的主動(dòng)感知。邊緣視覺(jué)與此不同,邊緣的感知通常是潛意識(shí)的。有效識(shí)別邊緣物體的一個(gè)重要因素是“光流”。如果物體的運(yùn)動(dòng)方向與實(shí)際的光流方向不同,就會(huì)產(chǎn)生一種刺激,這通常會(huì)激起人的反應(yīng),在這種反應(yīng)中,眼睛向這個(gè)刺激物重新定位。連續(xù)的光流對(duì)于有效的物體識(shí)別非常重要。光流的每個(gè)局部旋轉(zhuǎn)或改變,例如在視鏡中發(fā)生的變化,都意味著視覺(jué)認(rèn)知功能的額外工作。
3 商用車輛中人類感知的中央和邊緣視覺(jué)
通過(guò)中央凹視覺(jué)和邊緣視覺(jué)有關(guān)的理解,來(lái)描述商用車輛中的直接和間接視覺(jué)。圖2顯示了駕駛員從車輛上觀察前方5次(大約1.5-5秒的駕駛時(shí)間)的模擬感知。很明顯,駕駛員只能獲得他們所處環(huán)境中極小部分的清晰圖像。因此,駕駛員從少數(shù)幾個(gè)凝視點(diǎn)對(duì)其周圍環(huán)境的整體感知以及基于過(guò)去經(jīng)驗(yàn)中獲得的信息,創(chuàng)建了一個(gè)所處環(huán)境模型。
當(dāng)然,這種環(huán)境模型不僅考慮了直接視覺(jué),也考慮了間接視覺(jué)。在這方面,由于主視鏡方向和各種視鏡的不同光流,對(duì)視鏡中物體的邊緣探測(cè)是非常困難的。駕駛員現(xiàn)在不得不同時(shí)跟蹤7個(gè)不同的光流,而不是跟蹤一個(gè)全局光流。
因此,目前使用的視鏡系統(tǒng)需要通過(guò)中央窩視覺(jué)來(lái)監(jiān)控周圍環(huán)境。這反過(guò)來(lái)意味著,使用現(xiàn)有視鏡系統(tǒng)的駕駛員必須有意地將視線轉(zhuǎn)向相應(yīng)的視鏡,以便看到車輛側(cè)面和后方的區(qū)域。這對(duì)于商用車的主后視鏡來(lái)說(shuō)不是問(wèn)題,因?yàn)樗苡^察后方遠(yuǎn)處視野,因此完全符合中央窩視覺(jué)的觀察感知,即對(duì)遠(yuǎn)處物體的目標(biāo)定位和感知。然而,對(duì)廣角鏡和補(bǔ)盲鏡物體的進(jìn)行邊緣探測(cè)是不太可能的。在廣角鏡和補(bǔ)盲鏡中,駕駛員的任務(wù)是對(duì)附近物體進(jìn)行可靠、隨機(jī)的探測(cè),理想情況下這項(xiàng)任務(wù)是通過(guò)邊緣視覺(jué)來(lái)完成的,但現(xiàn)在必須用中央窩視覺(jué)來(lái)完成,即駕駛員必須有意識(shí)且要消耗一定時(shí)間觀察相應(yīng)的視鏡。
因?yàn)橐暰€只能聚焦在一個(gè)觀察方向上,而中央視覺(jué)不能以平行方式工作,所以連續(xù)檢查所有的鏡子需要一定的時(shí)間。例如,駕駛員需要至少2秒來(lái)檢查乘客側(cè)的三面鏡子。以30km/h的速度,此時(shí)卡車已經(jīng)向前移動(dòng)了大約17m(作為比較:五類視野的規(guī)定長(zhǎng)度目前為4.75m,在此時(shí)間范圍內(nèi)可能會(huì)超過(guò)3.5倍)。特別是在復(fù)雜的交通情況下,駕駛員被迫將自己限制在駕駛車輛所需的視野范圍內(nèi)。由駕駛員決定他們需要看哪些視鏡,不需要看哪些視鏡。圖3僅在直視廣角鏡時(shí)才能看到騎車人(右圖)。看向主后視鏡時(shí)并未看到騎車人(左圖)。
4 商用車CMS的設(shè)計(jì)
上述研究表明僅僅用CMS替換每個(gè)相應(yīng)的視鏡是無(wú)效的。用6個(gè)單獨(dú)的畫面替換6個(gè)視鏡會(huì)給駕駛員帶來(lái)與當(dāng)前視鏡系統(tǒng)相同的挑戰(zhàn)。駕駛員將再次被迫選擇他們需要看到的圖像。相反,CMS目標(biāo)應(yīng)該是減少顯示的圖像數(shù)量,同時(shí)向駕駛員提供相同數(shù)量的信息。基于駕駛測(cè)試的結(jié)果和關(guān)于人類感知的定義,我們可以制定視鏡替換系統(tǒng)設(shè)計(jì)的兩個(gè)主要目標(biāo):
(1)遠(yuǎn)景(主后視鏡區(qū)域)的顯示應(yīng)按照當(dāng)前的視鏡系統(tǒng)進(jìn)行設(shè)計(jì);
(2)近景(廣角鏡和補(bǔ)盲鏡區(qū)域)的顯示方式應(yīng)確保對(duì)物體的可靠探測(cè)。
只有減少監(jiān)控器的數(shù)量,這兩個(gè)主要目標(biāo)才能實(shí)現(xiàn)。這兩個(gè)主要目標(biāo)是通過(guò)合并視野來(lái)實(shí)現(xiàn)的。這種視野的優(yōu)勢(shì)顯而易見(jiàn):駕駛員看到的是一個(gè)單一的綜合圖像,其中包含所有的信息,否則將是來(lái)自三面鏡子的信息放在一起。這改善了駕駛員的視野方向和對(duì)物體的空間定位。結(jié)果就是用更少的時(shí)間獲取更多的信息。駕駛員無(wú)需再判斷他們必須看三面鏡子中的哪一面,而是可以一目了然地獲得所有必要的信息。圖4顯示了將乘員側(cè)的主視鏡,廣角視鏡和補(bǔ)盲視鏡視野組合集成到一個(gè)監(jiān)視器上。
駕駛員更有可能通過(guò)使用CMS來(lái)注意周圍物體。不像以前的視鏡系統(tǒng)中需要監(jiān)控三個(gè)不同的光流,整個(gè)場(chǎng)景現(xiàn)在可以在顯示器上顯示,可監(jiān)控一個(gè)連續(xù)的光流。因此,駕駛員可以通過(guò)中央視覺(jué)將注意力集中在他們的目標(biāo)上,同時(shí)通過(guò)邊緣視覺(jué)保持對(duì)周圍近的注意。可以更快、更有效地探測(cè)物體,甚至可以隨機(jī)探測(cè)。理想情況下用中央視覺(jué)完成的任務(wù),即對(duì)四類和五類區(qū)域的觀察,現(xiàn)在可以用CMS通過(guò)邊緣視覺(jué)完成。圖5中騎車人第一眼就被發(fā)現(xiàn),并且位置可以被正確確定。
5 結(jié)語(yǔ)
上述研究表明,視鏡替換解決方案有巨大的潛力,只要這些解決方案符合人體工程學(xué)設(shè)計(jì)。該系統(tǒng)針對(duì)人的感知和視力進(jìn)行了優(yōu)化,它不僅能提高駕駛員的駕駛體驗(yàn),還能提高車輛駕駛的安全性。文中顯示的二類、四類和五類視野的組合顯示是針對(duì)人類中央窩和邊緣感知進(jìn)行優(yōu)化的,CMS中圖像的直觀布局使駕駛員能夠輕松分析與車輛附近的物體,并跟蹤這些物體直到超出各觀察區(qū)域的邊界。這為駕駛員提供了一個(gè)單一全面的圖像分析所有的信息,否則他們將不得不從每側(cè)的三個(gè)單獨(dú)的視鏡中獲取這些信息。這有助于駕駛員感知車輛側(cè)面和后面的區(qū)域,不需要額外耗費(fèi)精力來(lái)整合感知的信息。該系統(tǒng)的另一個(gè)優(yōu)點(diǎn)是,駕駛員無(wú)需在看視鏡之前決定需要檢查哪些視野以及以何種順序進(jìn)行檢查。從一側(cè)可以同時(shí)看到所有視野,這明顯提高了通過(guò)駕駛員的邊緣視覺(jué)發(fā)現(xiàn)物體的幾率。
參考文獻(xiàn):
[1]Zaindl,A.,Zimmermann,A.,D?rner K.,Kohrs,C.:Camera-Monitor System as Mirror Replacement in Commercial Vehicles,ATZ,pp.12-
17,05 2015.
[2]UNECE.Uniform provisions concerning the approval of devices for indirect vision and of motor vehicles with regard to the installation of these devices:ECE R46 Revision 6[S].UNECE.2016.
[3]GB 15084-2013 機(jī)動(dòng)車輛 間接視野裝置 性能和安裝要求[S].
猜你喜歡
現(xiàn)代儀器與醫(yī)療(2022年2期)2022-08-11 09:51:40
汽車工程師(2021年12期)2022-01-18 06:02:43
建材發(fā)展導(dǎo)向(2021年14期)2021-08-23 00:57:04
建材發(fā)展導(dǎo)向(2021年23期)2021-03-08 01:05:44
裝備制造技術(shù)(2020年4期)2020-12-25 05:25:56
科技傳播(2019年22期)2020-01-14 03:05:32
活力(2019年17期)2019-11-26 00:42:18
基層中醫(yī)藥(2018年6期)2018-08-29 01:20:20
上海農(nóng)業(yè)學(xué)報(bào)(2017年3期)2017-04-10 12:39:18
信息安全與通信保密(2016年3期)2016-08-23 01:23:46
