幾種防空導彈自動駕駛儀的研究分析
2020-09-03 10:46:16嚴曙馨
航天控制 2020年4期
關鍵詞:結構
張 歐 嚴曙馨
江南機電設計研究所,貴陽550009
0 引言
在防空導彈領域,自動駕駛儀是飛行器的重要組成部分。導彈自動駕駛儀的設計根據其用途不同,可以分為過載駕駛儀和角度控制駕駛儀2類[1]。隨著現代戰爭的需要,空襲武器正朝著隱身性能強、作戰空域大、機動性能高等方向發展。防空導彈在大空域高機動飛行時,會產生大攻角,導致彈體氣動參數劇烈的非線性變化和俯仰、偏航、滾動3個通道之間嚴重的交叉耦合,給導彈的穩定控制系統設計帶來了困難[2-3]。
目前,使用較為普遍的是過載自動駕駛儀,用于防空導彈領域的結構主要有經典三回路過載控制結構[4-5]、偽攻角反饋三回路過載控制結構等[6-7],這2種過載自動駕駛儀均采用角速率陀螺儀測量彈體角速度,線加速度計測量彈體過載,但由于結構不同,使得其控制效果和魯棒性存在較大差異[1,8]。由大攻角、傾斜轉彎技術和推力矢量控制等帶來的復雜非線性氣動特性也會改變導彈的靜穩定性[2]。因此, 對自動駕駛儀的結構設計和靜不穩定導彈的控制展開研究具有重要意義。
本文對經典三回路控制結構、偽攻角控制結構、改進的PI控制結構、改進的PD控制結構以及改進的PD控制結構+偽攻角控制結構這5種自動駕駛儀進行了研究分析。將理論推導和數學仿真結合,從系統性能分析、參數極點配置、控制性能指標等方面,系統地對比了5種過載自動駕駛儀結構的異同,研究結論為飛行器過載自動駕駛儀的選型和設計提供了參考。
1 彈體運動學
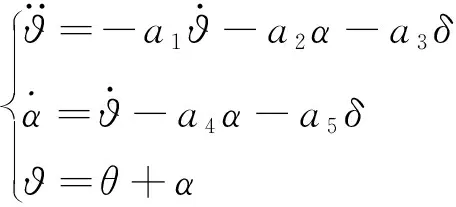
為不失一般性,本文討論的導彈彈體為軸對稱彈體,研究其縱向平面內的運動。若只考慮導彈彈體的剛性運動,忽略其彈性運動,通過對彈體采用“固化原則”和小擾動假設下的線性化[9],則導彈縱向動力學可由短周期運動方程來近似描述,如式(1)所示[10]。
(1)
其中:a1為導彈的氣動阻尼系數;a2為導彈的靜穩定系數;a3為舵效率系數;a4為導彈的推力升力系數;a5為舵升力系數;α為攻角;θ為彈道傾角;?為俯仰角;δ為舵偏角。
將式(1)寫成狀態方程形式為:

(2)
式中:
由式(2)表示的系統狀態方程,可得系統的可控矩陣的行列式值:

(3)

(4)
(5)
令A=a1+a4、B=a2+a1a4、C=a5、D=a1a5、E=a2a5-a3a4、F=-a3,則式(4)和式(5)可以變換為:
(6)
(7)
2 幾種自動駕駛儀控制方法
2.1 經典三回路
在本文研究的自動駕駛儀中,假設舵系統和陀螺及加表的數學模型為全通環節,經典三回路的穩定控制回路原理圖如圖1所示。
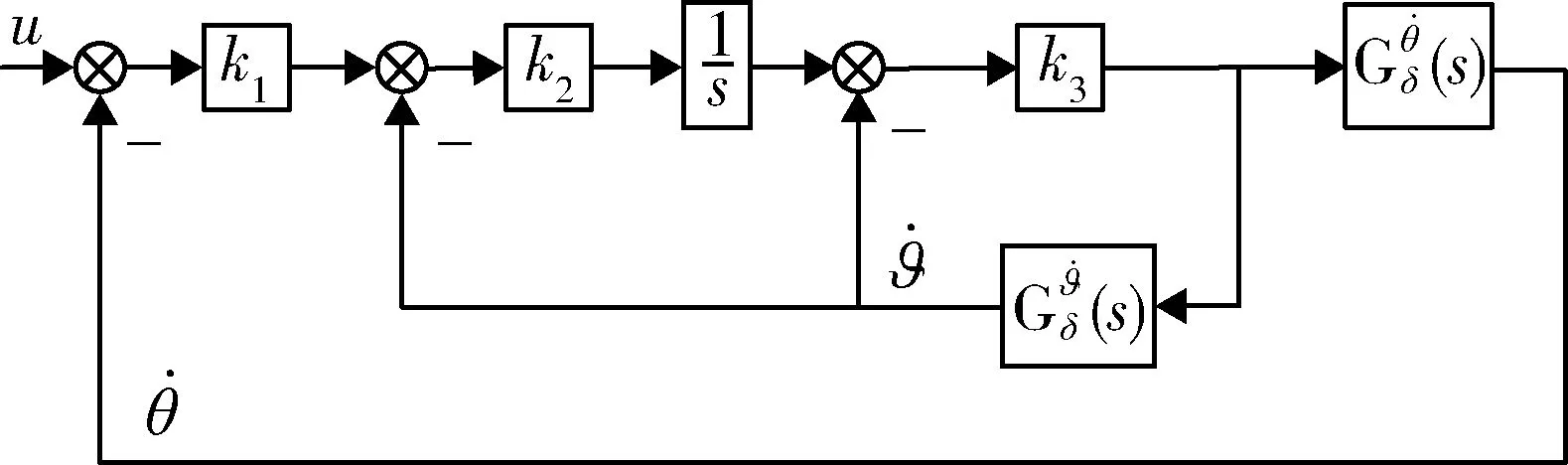
圖1 經典三回路結構
經典三回路過載駕駛儀在國內外飛行器上均得到了普遍應用。從圖1可知,經典三回路結構包含3個回路,即阻尼回路、增穩回路和過載回路;共有3個控制參數,即k1、k2和k3。經推導,可得到開環傳遞函數和閉環傳遞函數如下所示:

(8)

(9)
2.2 偽攻角結構
偽攻角結構的三回路過載駕駛儀也是一種三回路結構的過載駕駛儀,其結構框圖如圖2所示。對比圖1和2結構可知,經典三回路結構中的增穩回路為姿態角反饋,而偽攻角反饋駕駛儀將角速率陀螺的測量信號經過一個慣性環節后得到近似攻角,并將其作為增穩反饋。
在偽攻角結構中,a′=E/F,因此只有3個控制參數,即k1、k2和k3。經推導,可得其開環傳遞函數和閉環傳遞函數如下所示:
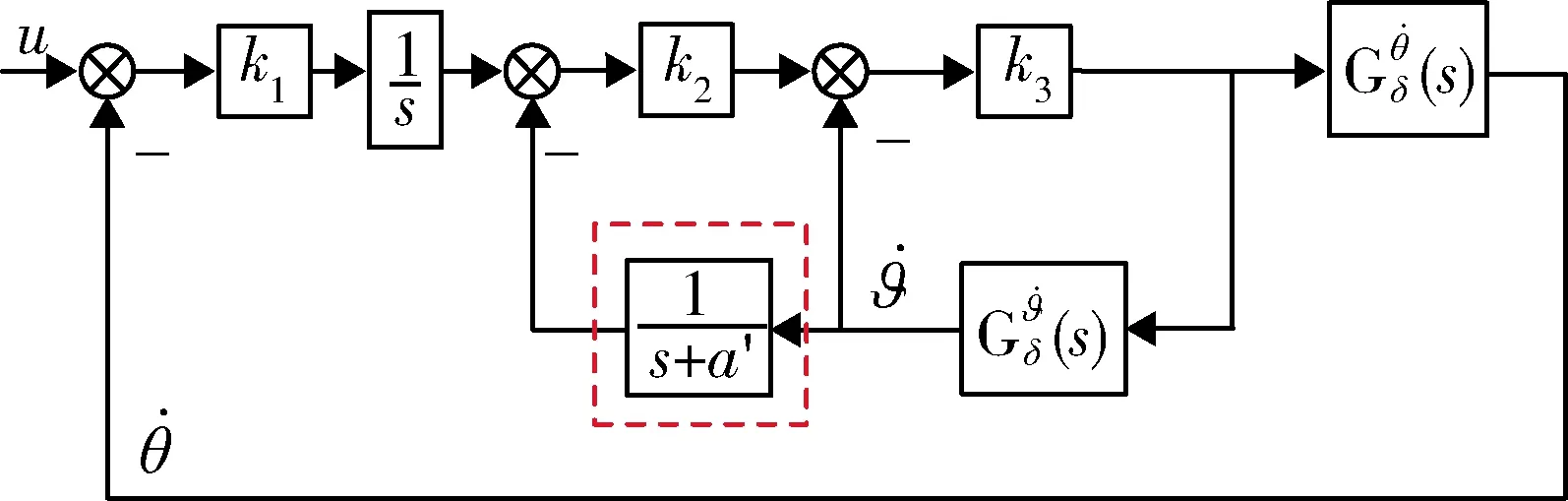
圖2 偽攻角結構
(10)

(11)
2.3 PI控制結構
改進的PI控制結構的自動駕駛儀框圖如圖3所示。與圖1的經典三回路結構相比,PI控制結構把控制器k1換成了k1+kI/s。由圖3可知,其有4個控制參數,即k1、k2、k3和kI,經推導,可以得到其開環傳遞函數和閉環傳遞函數分別如式(12)和(13)所示。

圖3 PI控制結構
(12)
(13)
2.4 PD控制結構
改進的PD控制結構的自動駕駛儀框圖如圖4所示,與改進的PI控制結構類似,只是將積分環節kI/s換成了微分環節kDs。同理,其有4個控制參數,即k1、k2、k3和kD,其開環傳遞函數和閉環傳遞函數分別如式(14)和(15)所示。
圖4 PD控制結構

(14)
(15)
2.5 偽攻角+PD控制結構
顧名思義,偽攻角+PD控制結構就是結合了偽攻角結構的自動駕駛儀和PD控制結構的自動駕駛儀,其原理框圖如圖5所示。

圖5 偽攻角+PD控制結構
在偽攻角+PD控制結構中,有k1、k2、k3和kD4個控制參數,其開環傳遞函數和閉環傳遞函數如下所示:

(16)

(17)
3 性能比較
3.1 系統性能比較
通過上一節的分析,可以得到5種不同自動駕駛儀的系統性能,如表1所示。由于系統的型別反映了系統對典型輸入信號(如階躍信號、斜坡信號、加速度信號等)無差的度量,由表可知,經典三回路結構和PD控制結構的系統型別最低,為0型,因此其跟蹤典型輸入信號的無差能力最差;而PI控制結構的型別最高,為Ⅱ型,所有其跟蹤典型輸入信號的無差能力最強。
表1 不同控制結構的系統性能
從系統的閉環增益可以看出,經典三回路結構和PD控制結構的閉環增益為1/(1+k1),需要增益補償;而其它3種控制結構的閉環增益為1,不需要補償。
3.2 實驗結果比較
為了更好地對比5種自動駕駛儀結構的性能,采用參考文獻[3]中的彈體氣動參數作為本文的實驗數據,如表2所示。可知,a2=-67.74,此被控對象是靜不穩定的,加入阻尼回路,以穩定靜不穩定彈體。
表2 彈體氣動參數
利用表2中的彈體氣動參數,對上述5種結構的自動駕駛儀進行了仿真實驗,得到了圖6~10的實驗結果。其中,圖6為單位階躍響應曲線;圖7為阻尼回路的Bode圖;圖8為單位舵偏響應曲線;圖9為單位側向角速度曲線;圖10為單位舵偏角速度曲線。

圖6 單位階躍響應

圖7 阻尼回路的Bode圖

圖8 單位舵偏響應曲線
圖9 單位側向角速度
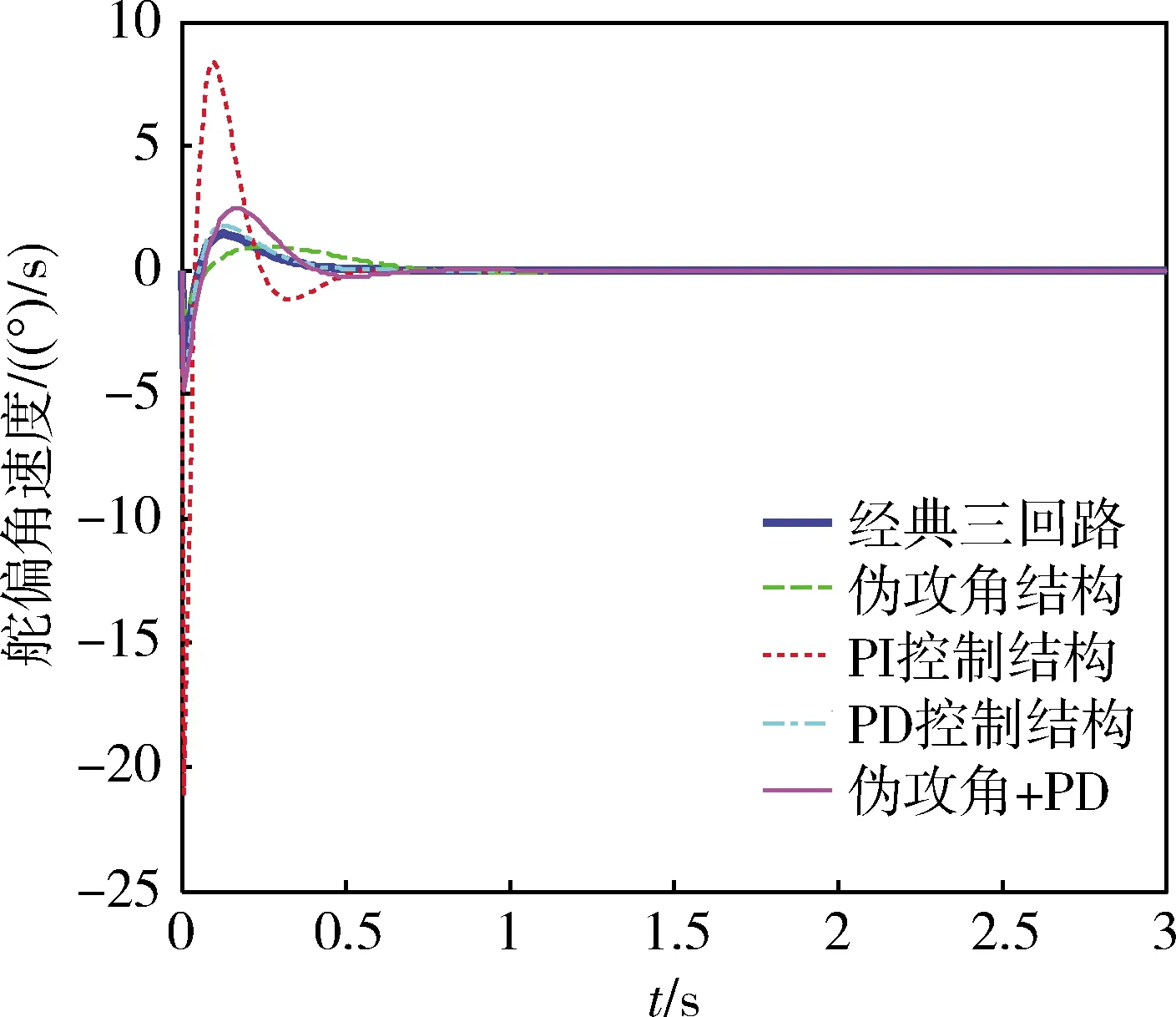
圖10 單位舵偏角速度
在仿真中,通過極點配置得到了5種自動駕駛儀的控制器參數(表3),由表可知,控制結構不同,則參數不同。表4為5種自動駕駛儀的穩定控制回路性能指標,可以看出PI控制結構的上升速度最快,但超調量最大,幅值裕度最低,截止頻率最高;經典三回路的超調量最低,其值為0%;PD控制結構的相位裕度最高;偽攻角+PD控制結構的幅值裕度最大,截止頻率最低,但相位裕度最低。
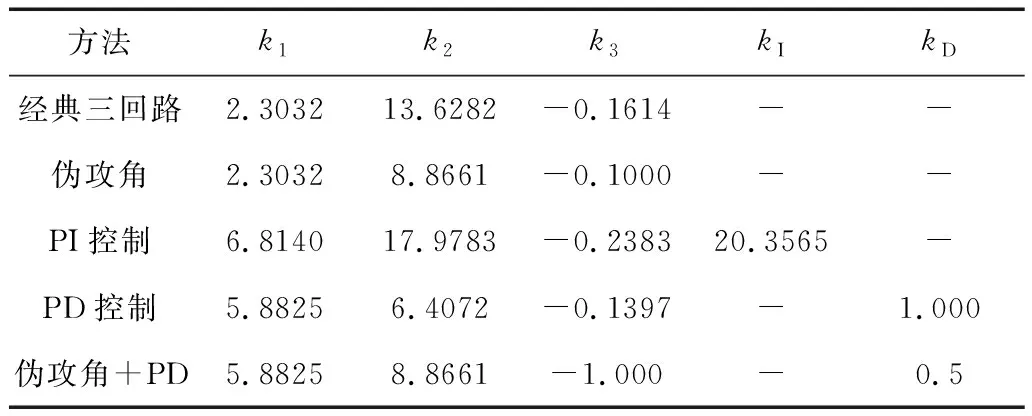
表3 控制器參數比較

表4 穩定控制回路性能比較
4 結論
介紹了5種控制結構的自動駕駛儀,即經典三回路控制結構、偽攻角控制結構、改進的PI控制結構、改進的PD控制結構以及改進的PD控制結構+偽攻角控制結構,并對其系統性能進行了理論推導分析。
通過對5種不同控制結構的自動駕駛儀的仿真分析可知,5種控制方法各有優缺點。相比于經典三回路結構,偽攻角控制結構在幅值裕度、相位裕度和截止頻率方面性能更優,但上升時間最慢;PI控制結構除了上升時間最快之外,其余性能較差;PD控制結構和偽攻角+PD控制結構除了相位裕度和截止頻率上差別大以外,其余性能相當,但考慮系統型別和閉環增益是否需要補償,則偽攻角+PD控制結構的綜合性能最優。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50