Ka頻段車載天線跟蹤低軌衛星方式影響因素分析*
2020-09-03 10:46:36張朋強徐晶晶
航天控制 2020年4期
關鍵詞:信號
雷 光 張朋強 袁 野 徐晶晶
西安衛星測控中心天津測控站,天津薊州 301900
0 引言
隨著衛星遙感技術的發展,星地之間傳輸數據的需求與日劇增,但因低軌地球衛星的可見弧段和時段固定,只能通過增加數據的傳輸速率,才可以達到大數據接收的需求。目前,低軌遙感衛星大部分通過S/L/X頻段(2~9GHz)傳輸地球遙感衛星數據至地面處理系統。根據香農定理,信號比特率的速率受信道帶寬大小的直接影響。隨著信號帶寬的增加,也就是頻率越高,數據傳輸速率也越來越高[1-3]。但Ka頻段的數據傳輸帶寬可達3.5GHz,傳輸速率可達7.0Gbps[4]。綜上考慮需求,可以使用Ka頻段傳輸高速率的遙感數據來解決數據量大和傳輸時間有限的矛盾。使用Ka頻段接收首先需要解決的問題就是對衛星實現高精度的跟蹤,Ka頻段波束極窄,特別是在跟蹤低軌道目標時,高動態性要求跟蹤天線具有很大的角速度和角加速度,對目標進行捕獲和實時跟蹤更是困難。本文針對Ka頻段車載天線低軌衛星高精度跟蹤的要求,提出優化跟蹤捕獲策略,并利用某車載設備進行了跟蹤驗證,為低軌Ka頻段衛星跟蹤提出優化改進思路。
1 影響近地跟蹤的主要因素分析
1.1 跟蹤精度預算指標分析
天線系統的跟蹤精度定義為天線波束軸方向與RF源方向之間的空間角誤差[7]。影響跟蹤誤差的主要誤差源及其貢獻,見表1。
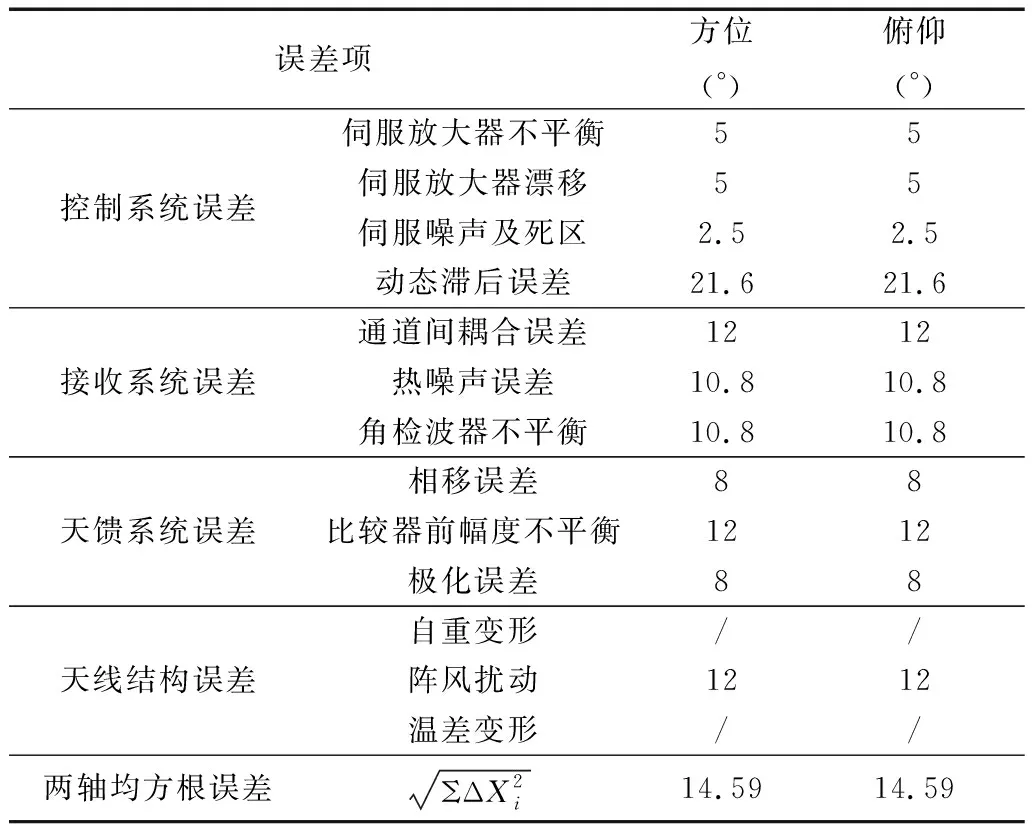
表1 某設備Ka頻段跟蹤精度預算表
通過以上跟蹤精度預算,4.5m天線的跟蹤精度滿足0.017°的指標要求,依此類推,其他口徑及頻率的跟蹤精度也均可滿足指標要求。
1.2 動態滯后誤差分析
影響車載天線跟蹤目標性能的重要因素是動態滯后的問題。對于低軌衛星,衛星運動速度很快,尤其是在衛星過頂前后,衛星運動對天線加速度要求很高。而天線系統由于速度、加速度、跟蹤方式等多方面的原因,存在一定的指向誤差。目標運動角加速度引起的動態滯后誤差,見式(1)[3]。
(1)


(2)
計算可知,衛星過頂前后的動態滯后誤差足以使天線指向偏出衛星的主瓣范圍,造成跟蹤丟失,無法實現對目標的穩定跟蹤。只有提高伺服系統等效加速度誤差系數Ka值,才能保證Ka頻段的穩定跟蹤。理論上取Ka為60,計算得ΔA為0.0038°,可知天線跟蹤系統的加速度常數必須優于60,并考慮一定余量才能滿足方位和俯仰動態滯后誤差分配要求。但實際工程上目前只能到6左右,所以需采取一定措施來解決動態誤差滯后的問題。
2 Ka頻段信號跟蹤修正方法
2.1 S引導Ka
由于Ka頻段半功率波束寬度太窄,如何成功捕獲Ka頻段信號并轉入Ka頻段自跟蹤是測控的關鍵所在。某設備具有雙頻饋源,在符合一定電軸一致性的前提下,利用S信號捕獲后引導Ka進行角捕,是一種可靠的角度捕獲方式。首先計算由S頻段自跟蹤轉入Ka頻段自跟蹤的成功概率如下:
在自引導時間T內,目標不超過給定空域的概率稱為連續引導概率[8]。假定:①在引導時間T內目標相繼離開主波束的概率近似服從“泊松分布”;②引導天線的隨機角誤差滿足正態性平穩隨機過程。
其自引導的概率見式(3)。
P=e-2λT
(3)
其中,
(4)
σ為引導設備的角隨機誤差,ε為引導設備的角系統誤差,σ′為引導設備的角隨機誤差變化率。
當引導設備熱噪聲引入的角噪聲功率譜密度為均勻分布時:
(5)
式中,βn為伺服寬帶,θ0.5為被引導設備波束寬度,T為連續引導時間。
S引導Ka頻段時,θ0.5=0.065°,βn=2Hz,T=0.5s,TZ=2s,σ=0.014,ε=0.0135,可得單次引導概率Pn約等于70.8%。
綜上所述,S頻段引導Ka頻段跟蹤具有一定工程實現難度,需要針對低仰角和高仰角的捕獲跟蹤流程進行設計,提高Ka頻段捕獲成功率。調節雙頻饋源電軸一致性精度,S引導Ka的方式進行角度捕獲,主要利用S信號波束寬度寬于Ka信號波束寬度。
由于半功率波束寬度與天線頻率成反比,因此頻率越高,跟蹤精度越難實現。同樣半功率波束寬度與天線口徑成反比。根據計算天線半功率公式可以得出不同口徑天線的半功率波束寬度。見表2。
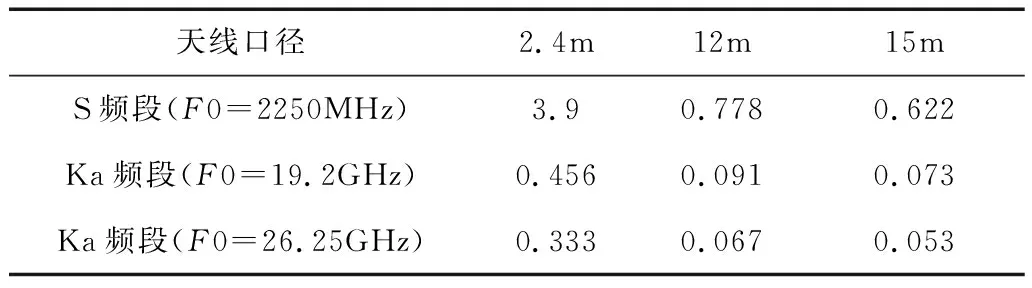
表2 不同頻段不同口徑天線的半功率波束寬度

2.2 S信號自跟蹤對Ka目標指向精度修正
由于S信號波束較寬,S自跟蹤條件下,對于Ka信號誤差電壓較大,Ka信號很容易跳出天線波束范圍以外。針對S自跟蹤條件下,對Ka信號的指向增加偏置,可以有效提高Ka信號的捕獲能力。圖1和圖2分別表示了在沒有和增加Ka信號偏置情況下,天線接收Ka信號的方位和俯仰誤差電壓。縱軸為天線跟蹤時的方位和俯仰誤差電壓U(單位V),橫軸為衛星進站時間t(單位min),可以看出,通過在S自跟蹤條件下,增加Ka信號指向偏置,有效提高了Ka信號的角度捕獲。
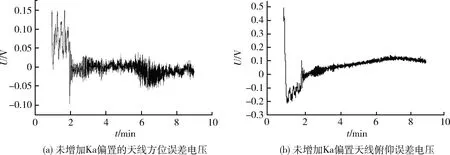
圖1 未增加Ka偏置的方位誤差電壓和俯仰誤差電壓
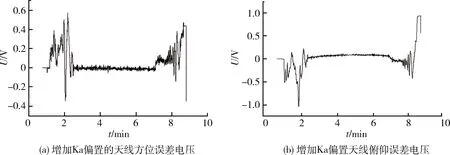
圖2 增加Ka偏置后的方位誤差電壓和俯仰誤差電壓
3 Ka頻段低軌衛星校相值使用時長分析
3.1 Ka頻段低軌衛星校相方法
目前航天器跟蹤快速校相方法已經成熟應用,對于Ka頻段低軌衛星快速校相方法有待驗證。下面對Ka頻段低軌衛星快速校相方法進行分析。天線能夠穩定跟蹤Ka目標需要跟蹤接收機輸出誤差電壓的極性、交叉耦合、定向靈敏都要滿足跟蹤要求[9]。
由于受Ka頻段天線外場條件限制,難以建立固定站或機動站標校塔,因此需要研究無塔校相方法。根據基于相對誤差計算的自適應校相方法,利用天線實現對標校源的程序跟蹤(目標在天線電軸的主波束寬度之內),調整天線方位、俯仰角度,天線控制單元自動采集跟蹤接收機誤差電壓變化斜率,根據極性要求,計算出相移變化量,對跟蹤接收機相位進行自動修正,從而滿足跟蹤要求,在校相過程中同時也標定出跟蹤接收機誤差電壓靈敏度,通過調整靈敏度增益達到合適的要求。
通過理論分析,在程序跟蹤方式下,當目標信號落入天線不同頻段的波束寬度內,只需要通過目標附近的兩個不同位置對接收的差支路信號進行和、差支路鑒相。在波束寬度之內,獲得位置 1的角度A1、E1,方位、俯仰誤差電壓UA1、UE1;位置2的角度A2、E2,方位、俯仰誤差電壓UA2、UE2。此時,可以認為目標相對天線移動了(-ΔA,-ΔE)。通過計算得出:

(6)
(7)
式(6)和(7)中:θ為移相值;k為增益系數。
基于以上原理,設計快速校相流程如下:
1)根據任務計劃及軌道預報數據裝訂目標衛星的工作頻點、極化等參數,天線控制單元計算機加載軌道預報數據;
2)任務啟動時刻,天線轉入程序跟蹤方式,由軌道預報數據引導天線隨目標運行;
3)天線控制計算機啟動自適應校相程序,跟蹤接收機捕獲目標信號后,完成1次角度及誤差電壓采集;微調天線(目標在半功率波束寬度內),第2次獲得角度及誤差電壓數據(約10s);根據以上公式計算初步校相參數;
4)天線控制單元計算機通過網絡將校相結果置入跟蹤接收機,同時跟蹤接收機在小范圍完成校相參數精校正并實現對參數的驗證,最終完成校相參數存儲,系統校相工作完成;
5)天線此時可以從程序跟蹤狀態轉角度自跟蹤狀態。
3.2 Ka頻段低軌衛星校相值保持時長分析
由于低軌衛星過境時間短,高速數傳數據下傳時間更短,高速數傳資源寶貴,無法做到每個圈次實現校相,如何做好一次校相,長時間滿足跟蹤要求,是低軌Ka頻段衛星需要解決的問題。校相參數的有效時間主要取決于分系統中射頻前端設備及電纜的相位穩定度,經過分析與相位相關的設備及電纜主要包括低噪聲放大器、和差合成前傳輸電纜及移相合成網絡[10]。為了確保校相參數有效,天線跟蹤交叉耦合要求不大于1/6,折合角度見式(8)。
(8)
因此要求在30天內系統的整體相位穩定度要優于9.65°。經過分析論證及模擬試驗,低噪聲放大器、移相合成網絡均屬于溫度敏感設備(溫度影響相位穩定度),傳輸電纜屬于溫度及機械(抖動或彎曲)敏感器件,同時考慮到實際情況,30天內溫度變化值可設定為20℃,線纜機械抖動或彎曲值可設定為60°,下面在以上假定條件下進行校相參數有效時間實現分析:
低噪聲放大器:不同頻段的低噪聲放大器的溫度敏感性存在差異,按照變化最劇烈的Ka頻段計算,變化值約為0.05(°)/℃,30天內(20℃)相位變化將不超過1°。移相合成網絡:移相合成網絡的溫度敏感性在多頻段情況下基本一致,變化值約為0.1(°)/℃,30天內(20℃)相位變化將不超過2°。傳輸電纜:移相網絡前的傳輸電纜采用穩相電纜,長度不超過0.3m,波速比為84%,20℃內最大溫度相位系數(0℃~20℃)Kp為300,彎曲相位為6°。
下面分別計算30天內(20℃)的溫度相位變化及彎曲相位變化。
相位長度:L=(0.833×Vp)/F=0.0254mm/(°);
單位長度相位:Φ1=(L1/L)=300/0.0254=11811°;
溫度相位變化:Φ2=Φ1×(Kp/1000000)=3.54°。
彎曲相位變化:在線纜彎曲一圈(360°)的情況下,彎曲相位為6°,機動站采取緊固定位措施,30天內電纜彎曲及抖動度數不超過60°,相位變化值不超過1°。
考慮在惡劣情況下,溫度相位變化與彎曲相位變化相累加,傳輸線纜造成的相位變化也將不大于3.54°+1°=4.54°。綜上所述,同時考慮低噪聲放大器、傳輸線纜及移相合成網絡的情況下,在考慮選用穩相電纜及移相器、采取饋源內緊固措施的前提下,30天內相位變化不超過1°+2°+4.54°=7.54°<9.65°,射頻前端采用穩相器件及線纜的情況下可以實現30天內校相參數有效的使用需求。
4 結論
針對目前國內某套Ka頻段車載設備跟蹤低軌Ka目標的實際跟蹤過程及總的跟蹤性能進行了分析,通過對近地高頻段信號跟蹤影響因素分析和前期實際跟蹤過程中的積累數據進行總結,對Ka頻段校相原理進行了分析,總結了Ka頻段校相值可用時長。制定了有效的跟蹤修正方法和策略,對后續該類型衛星高效跟蹤及新建地面固定裝備對Ka頻段低軌目標跟蹤有一定的指導意義。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06