基于演化博弈論的城市道路違章停車行為模型
2020-09-07 09:54:56盧守峰
交通運輸研究 2020年4期
王 浩,盧守峰
(1.湖南省交通科學研究院有限公司,湖南 長沙 410015;2.長沙理工大學交通運輸工程學院,湖南 長沙 410114)
0 引言
隨著城市化進程的加快和居民生活水平的提高,我國機動車保有量快速增加。但城市中心區(qū)域用地有限,停車位供應不足,因此路內(nèi)違章停車現(xiàn)象較為嚴重。違章停車會影響動態(tài)交通,降低道路通行能力,導致交通擁堵,還容易引發(fā)交通事故,不利于交通系統(tǒng)安全、穩(wěn)定地運行。為降低因違章停車造成的交通擁堵和事故率,提升城市交通運行效率,需對違章停車行為進行研究。治理違章停車涉及多方相互競爭以實現(xiàn)共贏,而博弈論主要研究公式化了的激勵結構間的相互作用,是分析具有斗爭或競爭性質(zhì)現(xiàn)象的數(shù)學理論和方法,因此可被用來研究違章停車行為及管理。
在已有的機動車停車管理研究中,Elbert 等[1]提出應對路內(nèi)停車收取一定的停車費用,同時政府對公共交通進行補貼,引導出行者選擇公共交通出行,降低停車泊位需求,從而緩解停車泊位的供 需 矛盾;Ommeren 等[2,5]、Sabir 等[3]、Groote等[4]主要從經(jīng)濟學角度分析停車成本;Lambe[6]基于行駛距離、步行距離和停車費率構建了線性函數(shù)模型;Soto等[7]構建了考慮駕駛員個體異質(zhì)性的混合離散停車選擇模型;Zakharenko[8]提出一種隨時間推移而發(fā)展的停車需求模型;Shao 等[9]構建了居民和公共用戶之間共享住宅停車位的停車模型;Xu 等[10]研究了大城市工作時間內(nèi)私人停車位共享問題;段滿珍等[11-14]分別從共享停車誘導模型、共享能力評估模型、共享停車泊位分配模型方面進行了深入研究。
在已有的將博弈論運用于交通領域的研究中,李平[15]構造了行人過街沖突博弈模型;竇水海[16]將重復博弈與交通參與者結合,通過構造過街行人的行為決策函數(shù)研究行人過街行為的演化規(guī)律;丁浣[17]利用經(jīng)濟學原理及博弈論思想對停車選擇行為進行了研究,構建了路內(nèi)停車選擇博弈模型并提出改善停車平衡狀態(tài)的措施;陸鍵等[18]以運輸風險最小為目標,建立了基于零和博弈理論的危險品運輸網(wǎng)絡復合選線模型。
總體而言,國內(nèi)外學者在機動車停車管理方面已積累了不少研究成果,主要集中于路內(nèi)停車定價、路內(nèi)停車政策、停車位選擇、停車位共享等領域,但在違章停車管理方面,較少考慮駕駛員與執(zhí)法人員的相互博弈。因此,本文基于演化博弈理論綜合考慮停車成本、執(zhí)法成本等影響因素分析違章停車行為,在交通參與者有限理性原則下,構建機動車駕駛員違章停車與交通管理人員巡查執(zhí)法演化博弈模型,并對參與者行為進行演化分析,對影響中心點的參數(shù)進行敏感性分析,以期為緩解城市道路違章停車現(xiàn)象提供理論指導。
1 機動車駕駛員與執(zhí)法人員演化博弈模型
城市道路違章停車與管理過程主要涉及機動車駕駛員與執(zhí)法人員兩種交通主體,各交通主體間并非完全獨立,相互間存在一定影響。任何一個交通主體的策略選擇將影響其他成員的決策。為了能更真實地反映城市違章停車管理過程中群體行為間的相互影響和行為演化的動態(tài)過程,本文構建了機動車駕駛員與交通執(zhí)法人員行為演化博弈模型,并進行演化穩(wěn)定性分析,同時對影響中心點的參數(shù)進行敏感性分析。
1.1 模型假設
執(zhí)法人員的目的是實現(xiàn)社會整體效益最大化,而交通出行者的目的為實現(xiàn)自身利益最大化,二者之間的信息不對稱、矛盾和沖突,符合博弈論的應用條件。如果作為交通出行者的機動車駕駛員都能遵守停車規(guī)則規(guī)范停車,則執(zhí)法人員無需管理,也就不存在博弈的情況。然而現(xiàn)實中機動車駕駛員不一定遵守停車規(guī)則,執(zhí)法人員也不一定全部嚴格管理,這就存在博弈的空間,機動車駕駛員和執(zhí)法人員間存在著競爭合作關系。本節(jié)對機動車駕駛員和執(zhí)法人員進行博弈分析。
本博弈模型的違章停車管理情景如下:城市停車資源緊張,機動車駕駛員在各種利益的驅使下有可能進行路內(nèi)違章停車,執(zhí)法人員會出勤處罰違章停車行為,但基于其對自身出勤成本和警力等因素的考慮,可能出勤次數(shù)不夠,無法完全控制路內(nèi)違章停車。根據(jù)我國城市交通中各交通主體的特性,為方便建模,進行如下假設。
(1)在復雜的交通情景下,城市道路違章停車與管理過程存在兩個具有學習自適應能力的群體:機動車駕駛人員、交通管理者。機動車駕駛員的行為集合為{違停;不違停}。交通管理者的行為集合為{執(zhí)法;不執(zhí)法}。假設執(zhí)法人員的執(zhí)法概率為y,不執(zhí)法的概率為1-y;假設機動車駕駛員不違章停車的概率為z,違章停車的概率為1-z。
(2)駕駛員、交通管理者、交通管理者的上級主管部門三方均為風險中性經(jīng)濟人且均為有限理性。
(3)假設機動車駕駛員遵守交通法規(guī)且不違章停車獲得的安全收益為c1,機動車駕駛員因遵守交通法規(guī)選擇不違章停車勢必造成停車費用、時間(尋位時間)、節(jié)能等的損失用-c2表示。由于違章停車會導致道路擁堵,交通管理者會采取執(zhí)法措施,對違章停車行為進行處罰,駕駛員違章停車罰金損失記為-Q。由于機動車出行本身就是一個消費的過程,所以假設c2>c1;而違章停車受到處罰的費用應該大于不違章的費用,因此Q>c2>c1>0。
(4)假設執(zhí)法人員不執(zhí)法會節(jié)省人力、物力、時間、精力等成本(即執(zhí)法成本),用c3表示。當違章管理情況較好時上級主管部門給予執(zhí)法人員的獎勵記為c4。為保證執(zhí)法人員收益為正,所以c4>c3>0。
根據(jù)以上假設,列出城市道路違章停車管理收益矩陣,如表1所示。
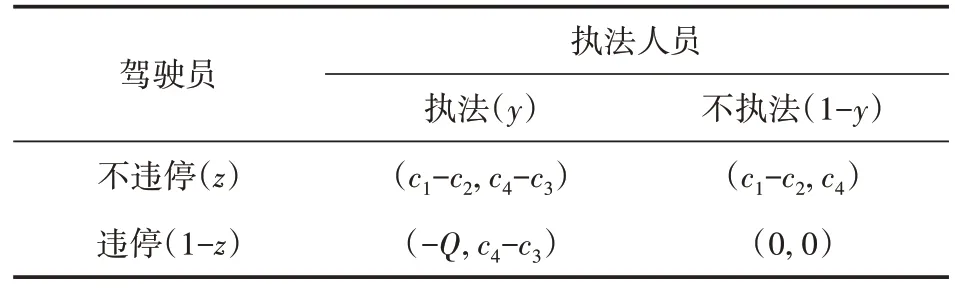
表1 城市道路違章停車管理博弈雙方收益矩陣
1.2 演化博弈模型構建
(1)機動車駕駛員的期望收益和復制動態(tài)方程
根據(jù)收益矩陣,機動車駕駛員遵守交通法規(guī)不違章停車的期望收益如式(1)所示:

同理,機動車駕駛員不遵守交通法規(guī)違章停車的期望收益如式(2)所示:

根據(jù)機動車駕駛員不違章停車和違章停車的期望收益得到機動車駕駛員的期望收益,如式(3)所示:

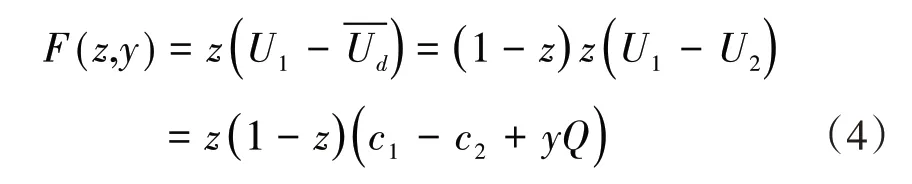
綜上,得到機動車駕駛員遵守交通法規(guī)不違章停車的復制動態(tài)方程,如式(4)所示:
(2)執(zhí)法人員的期望收益及復制動態(tài)方程
執(zhí)法人員執(zhí)法的期望收益如式(5)所示:

執(zhí)法人員不執(zhí)法的期望收益如式(6)所示:

根據(jù)執(zhí)法人員執(zhí)法與不執(zhí)法的期望收益得到執(zhí)法人員期望收益如式(7)所示:

綜上,可得執(zhí)法人員執(zhí)法的復制動態(tài)方程如式(8)所示:

將式(4)和式(8)組合,得到城市道路違章停車管理演化博弈模型,如式(9)所示:

分別對F(z,y)和G(z,y)求偏導數(shù),可得到演化博弈模型的雅克比矩陣J,如式(10)所示:

2 機動車駕駛員與執(zhí)法人員行為演化分析
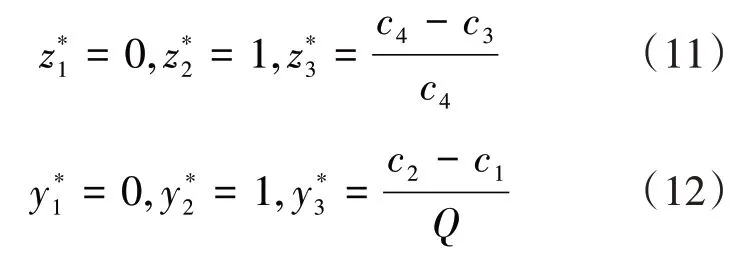
在動態(tài)系統(tǒng)中,局部漸進穩(wěn)定的策略稱為演化均衡。對于多個群體的多個策略演化博弈,演化均衡可等價于穩(wěn)定演化策略(Evolutionary Sta?ble Strategy,ESS)。因此,僅需要得到復制動態(tài)方程的漸進穩(wěn)定點即可得到城市道路違章停車管理演化博弈的穩(wěn)定演化策略。據(jù)此可知該演化動態(tài)均衡體系的局部平衡點是:
為分析復制動態(tài)方程的穩(wěn)定性,尋求復制動態(tài)方程的穩(wěn)定平衡解,需采用非線性系統(tǒng)的穩(wěn)定性判斷方法對上述均衡點進行穩(wěn)定性判斷。故提出下列假設。
假設1:(0,0)不是系統(tǒng)的演化穩(wěn)定點。
證明:將(z,y)=(0,0)代入雅克比矩陣J中,得到雅克比矩陣的行列式值和矩陣的跡,如式(13)與式(14)所示。

因為c2>c1且c4>c3,而c1,c2與c4,c3之間的大小關系不能確定,因此Det(J)<0,Tr(J)不能確定為正還是為負,所以點(0,0)不是穩(wěn)定點。現(xiàn)實中也不會存在駕駛員全部違章停車,執(zhí)法人員全部不執(zhí)法的情況。
假設2:(0,1)不是系統(tǒng)的演化穩(wěn)定點。
證明:將(z,y)=(0,1)代入雅克比矩陣J中,得到雅克比矩陣的行列式值和矩陣的跡,如式(15)與式(16)所示。

因 為0
假設3:(1,0)不是系統(tǒng)的演化穩(wěn)定點。
證明:將(z,y)=(1,0)代入雅克比矩陣J中,得到雅克比矩陣的行列式值和矩陣的跡,如式(17)與式(18)所示。
因為c2>c1且c3>0,而c3與c1,c2之間的大小關系不能確定,因此Det(J) <0,Tr(J)不能確定為正還是為負,故點(1,0)不是穩(wěn)定點。
假設4:(1,1)不是系統(tǒng)的演化穩(wěn)定點。
證明:將(z,y)=(1,1)代入雅克比矩陣J中,得到雅克比矩陣的行列式值和矩陣的跡,如式(19)與式(20)所示。

因為0
因為0
根據(jù)以上分析可知,該演化博弈模型無演化穩(wěn)定點,機動車駕駛員不違停概率隨執(zhí)法人員執(zhí)法概率的變化而變化,得到均衡點穩(wěn)定性分析表(見表2)和演化博弈動態(tài)圖(見圖1)。
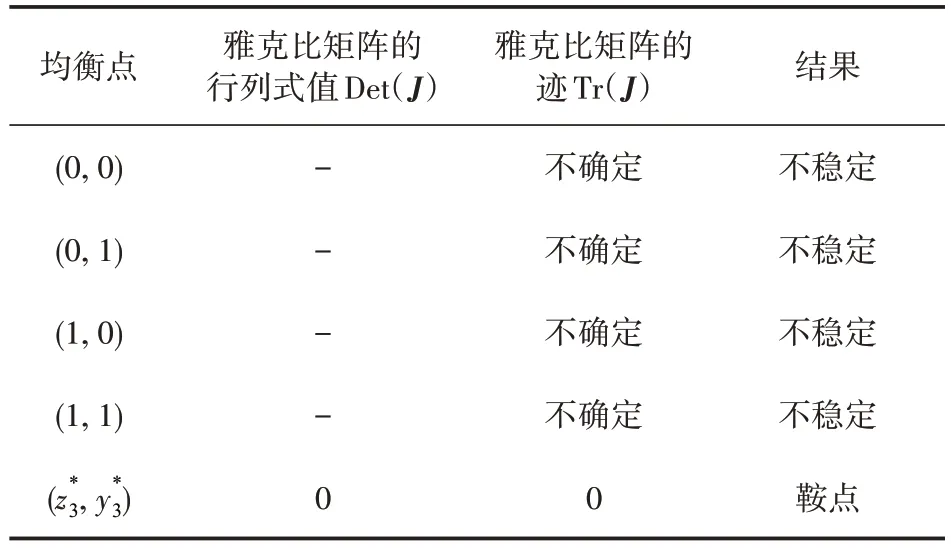
表2 均衡點穩(wěn)定性分析結果
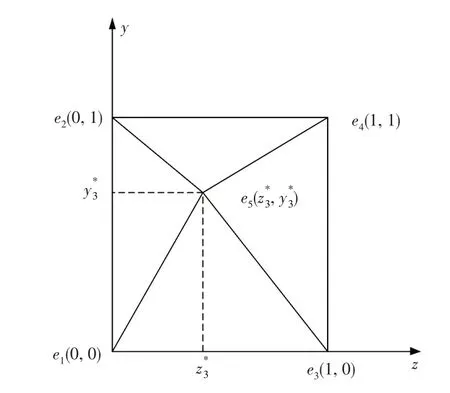
圖1 演化博弈動態(tài)圖
3 行為參數(shù)敏感性分析
(1)執(zhí)法人員執(zhí)法成本c3的敏感性分析:
執(zhí)法人員的執(zhí)法成本對機動車駕駛員的行為產(chǎn)生影響,但是對執(zhí)法人員的行為未產(chǎn)生影響。執(zhí)法人員的執(zhí)法成本越大,機動車駕駛員越趨于采取違章停車策略。
(2)執(zhí)法人員執(zhí)法獲得的獎勵c4的敏感性分析:
執(zhí)法人員在執(zhí)法的情況下獲得的獎勵對機動車駕駛員的行為產(chǎn)生影響,但是對執(zhí)法人員的行為不產(chǎn)生影響。執(zhí)法人員執(zhí)法情況下獲得的獎勵越高,機動車駕駛員采取不違章停車的概率也越大。
(3)機動車駕駛員不違停安全收益c1對中心點()的敏感性分析:
機動車駕駛員不違停安全收益對執(zhí)法人員的行為產(chǎn)生影響,但對機動車駕駛員的行為選擇無影響。不違章停車的安全收益越大,交通管理人員執(zhí)法概率越小。
(4)機動車駕駛員不違章停車的停車費用、時間、節(jié)能等損失-c2的敏感性分析:
駕駛員不違章停車的停車費用、時間、節(jié)能等損失對執(zhí)法人員的行為產(chǎn)生影響,但對機動車駕駛員的行為選擇無影響。不違章停車的停車費用、時間、節(jié)能等損失越大,執(zhí)法人員越趨向于增大執(zhí)法概率。
(5)機動車駕駛員違停受到的處罰Q的敏感性分析:

機動車駕駛員違停受到的處罰對執(zhí)法人員的行為產(chǎn)生影響,但對機動車駕駛員的行為選擇無影響。機動車駕駛員違停處罰越大,執(zhí)法人員的執(zhí)法概率越小。
綜合上述分析可得:
由此可知,影響因子對中心點的影響變化率不同。改變執(zhí)法人員執(zhí)法成本比改變執(zhí)法人員執(zhí)法獲得的獎勵對機動車駕駛員的不違章停車概率影響更大;改變駕駛員不違章停車安全收益和機動車駕駛員不違章停車的停車費用、時間、節(jié)能等損失比改變違章停車受到的處罰對執(zhí)法人員執(zhí)法概率影響更大。
4 算例分析
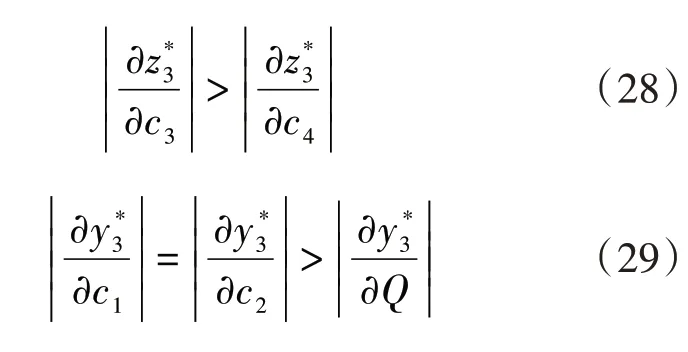
假設執(zhí)法人員執(zhí)法獲得的獎勵c4恒等于100元,駕駛員不違章停車的概率與執(zhí)法成本c3線性相關,隨著執(zhí)法成本的增加駕駛員不違章停車的概率降低,即違章停車行為增加,變化速率為=0.01,如圖2 所示。假設執(zhí)法人員執(zhí)法成本c3恒等于100 元,駕駛員不違章停車的概率與執(zhí)法人員執(zhí)法獲得的獎勵c4曲線相關,隨著執(zhí)法人員執(zhí)法獲得獎勵的增加駕駛員不違章停車的概率增加,即違章停車行為減少,變化速率最大值為=0.0001,如圖3所示。由于因此改變執(zhí)法人員執(zhí)法成本比改變執(zhí)法人員執(zhí)法獲得的獎勵對機動車駕駛員的不違章停車概率影響更大。
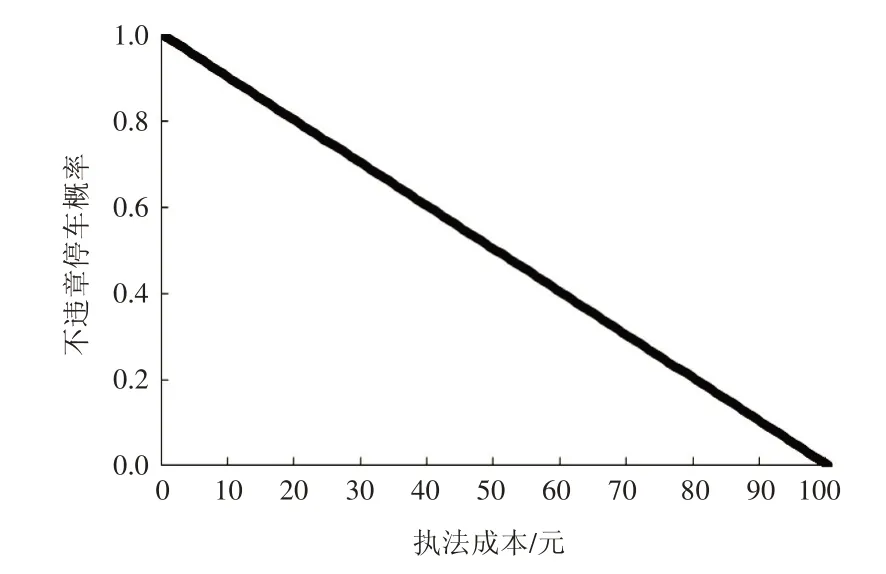
圖2 執(zhí)法成本對不違章停車概率的影響
圖3 執(zhí)法獲得的獎勵對不違章停車概率的影響
假設機動車駕駛員違停受到的處罰Q恒等于30 元,執(zhí)法人員執(zhí)法概率與駕駛員不違停凈損失(c1-c2)線性相關。隨著不違停凈損失的增加執(zhí)法人員執(zhí)法概率增大,即違停現(xiàn)象增加,變化速率為Q-1=0.03,如圖4 所示。假設駕駛員不違停凈損失(c1-c2)恒等于30 元,執(zhí)法人員執(zhí)法概率與違停處罰Q呈反比,隨著違停處罰的增加執(zhí)法人員執(zhí)法概率將減小,即違停現(xiàn)象減少,變化速率最大值為30Q-2且30Q-2≤0.03,如圖5 所示。因此改變駕駛員不違章停車凈損失比改變違章停車受到的處罰對執(zhí)法人員執(zhí)法概率影響更大。
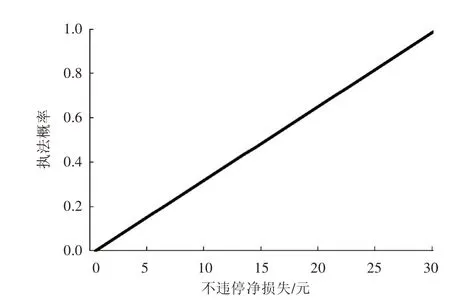
圖4 不違停凈損失對執(zhí)法概率的影響
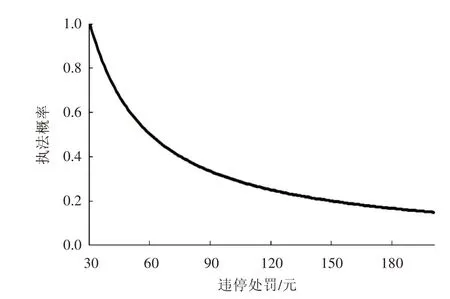
圖5 違停處罰對執(zhí)法概率的影響
5 結語
本文構建了機動車駕駛員與執(zhí)法人員之間的演化博弈模型,并對其行為進行了演化分析,得出該模型不存在演化穩(wěn)定點,即隨著機動車駕駛員選擇策略概率的變化,執(zhí)法人員隨之做出反應,繼而又影響到機動車駕駛員的策略選擇,如此反復循環(huán)。本文對影響中心點的參數(shù)進行了敏感性分析,得到利導因子和不利因子,同時還分析了各參數(shù)對中心點的影響速率,發(fā)現(xiàn)改變執(zhí)法人員執(zhí)法成本比改變執(zhí)法人員執(zhí)法獲得的獎勵對機動車駕駛員的不違章停車概率影響更大;改變駕駛員不違章停車凈損失比改變其違章停車受到的處罰對執(zhí)法人員執(zhí)法概率影響更大。因此,為改善違章停車現(xiàn)狀可優(yōu)先從降低執(zhí)法人員的執(zhí)法成本、降低駕駛員不違停凈損失方面著手。
本文在有限理性原則下建立模型過程中對交通參與者的個體屬性考慮不夠全面,而現(xiàn)實中交通個體都是異質(zhì)的。因此,在今后的研究中可加入不同的個體屬性,將交通參與主體根據(jù)年齡、性別、文化程度等分類,研究在博弈環(huán)境中不同屬性交通參與主體的演化規(guī)律。
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
中學生數(shù)理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
汽車實用技術(2022年4期)2022-03-07 06:07:20
當代陜西(2021年2期)2021-03-29 07:41:24
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(2016年15期)2016-12-01 05:31:22
中國塑料(2016年3期)2016-06-15 20:30:00
公民與法治(2016年4期)2016-05-17 04:09:26
軍事歷史(1985年2期)1985-01-18 07:39:33