人形舞蹈機器人的結構設計及實現
2020-10-13 09:47:01來盼盼
數碼設計 2020年6期
關鍵詞:結構設計

摘要:現階段,機器人的應用領域不斷拓寬,研究具有人類智能、靈活性,并能夠與人交流,不斷適應周圍環境的機器人一直是人類的夢想之一。人形舞蹈機器人作為人形機器人的一種,能夠隨著音樂和舞蹈翩翩起舞,所展現的觀賞性和科學性將給人們帶來極大的視覺沖擊和科技享受,在教育娛樂服務等方面前景光明。本文從舞蹈機器人的概述展開,重點討論了其機械結構設計和舞蹈動作的調試。
關鍵詞:人形機器人;結構設計;舵機選型;舞蹈動作
中圖分類號:TP242文獻標識碼:A文章編號:1672-9129(2020)06-0075-02
Abstract:Atthepresentstage,theapplicationoftherobothasbeenexpanding,researchwithhumanintelligence,flexibility,andcancommunicatewithpeople,constantlyadapttotheenvironmentoftherobothasbeenoneofthedreamsofhumanbeings.Asakindofhumanoidrobot,humanoiddancerobotcandancealongwithmusicanddance.Itsornamentalandscientificfeatureswillbringgreatvisualimpactandtechnologicalenjoymenttopeople,andithasabrightfutureineducationandentertainmentservices.Inthispaper,thedesignofthemechanicalstructureandthedebuggingofthedancemovementofthedancerobotarediscussed.
Keywords:humanoidrobot;Structuraldesign;Steeringgearselection;Dancemoves
1引言
近年來,仿生科技發展迅猛,仿生科技在機器人技術發展領域的表現格外引人注目,其中人形機器人的研究和發展尤其受到各國研究人員青睞,成為智能機器人領域中最活躍的研究熱點之一。
人形舞蹈機器人除了可以用腳走路外,更可以表現各種高難度的仿人動作,如跑步、側翻、跳躍、滾翻、倒立、上下臺階等,機器人身手敏捷,動作多姿多彩,令人大開眼界。
2結構設計
2.1機械結構。舞蹈機器人的設計一般要經過創意提出、初步設計、組裝調試、最終定型等幾個大的步驟。其中很重要的一個環節是機械結構設計,它關系到后面機器人的整體性能以及控制系統的設計,一個好的結構設計可以極大的方便之后的調試以及表現。
我們按照人體三段式對稱結構,即頭部,軀干,雙臂及腿部設計(如圖2-1)。各種儀器設備(如攝像頭)可以安裝在頭部,以實現目標的識別及人機交互。軀干部則是整個機器人的結構核心,起固定和配合雙臂動作作用,控制電路板可以安裝在此處。腿部則影響著機器人的重心位置,腿部結構精確可以更好的模擬人類行走,使得整個機器人更加穩定。
2.2自由度分析。我們設計的人形機器人,高960mm,重10kg,共有19個自由度(如表2-2),包括頭部的1個自由度,手臂部位的4*2=8個自由度(肩關節2+肘關節1+腕關節1),腿部(表中未列出)的5*2=10個自由度(腰關節2+膝關節1+踝關節2)。
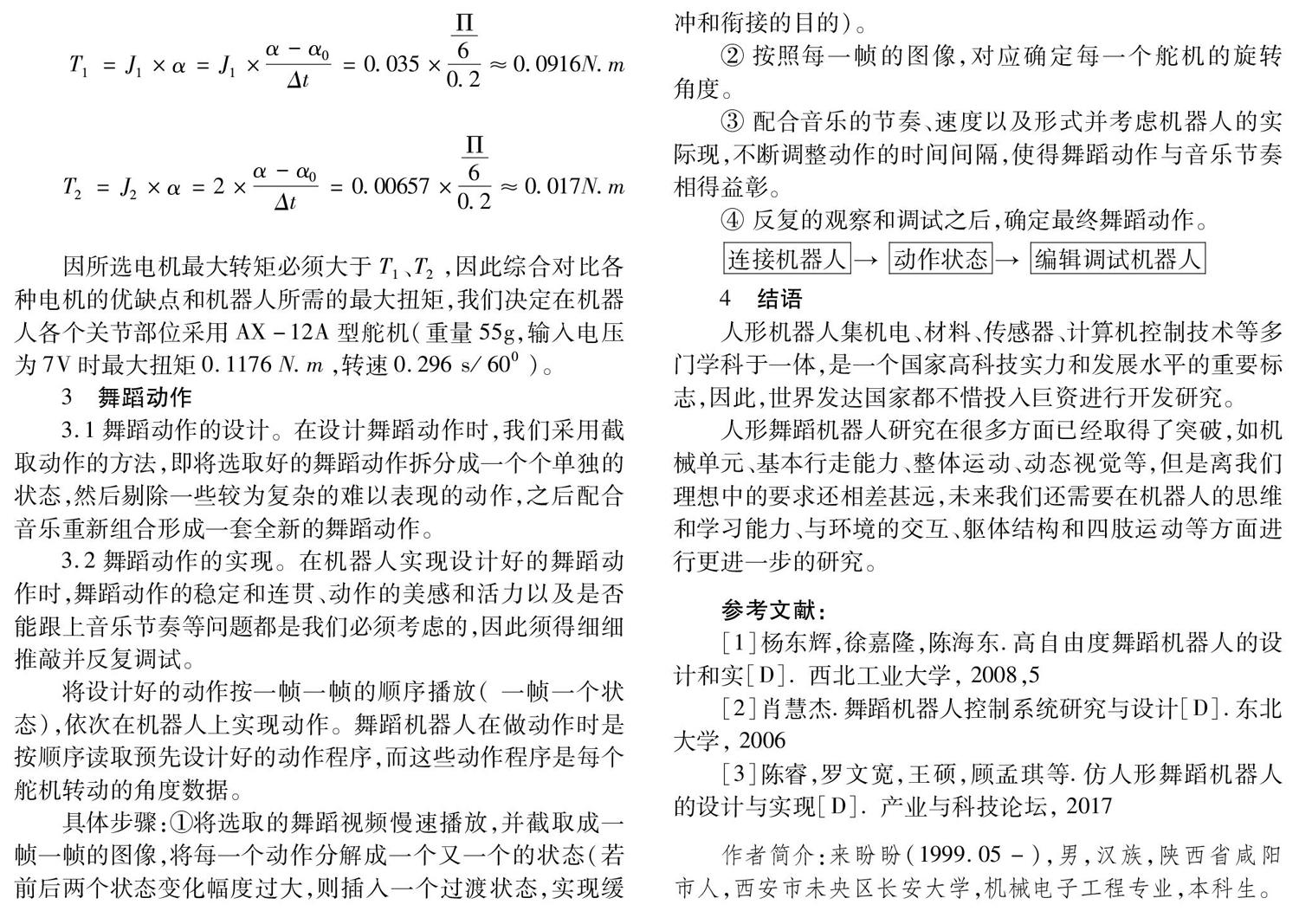
2.3電動機的選擇。對于機器人來說電機通常有3種,即步進電機、直流電機和舵機,其中步進電機速度控制精確,但是扭矩較小,體積大;直流電機扭矩大,功耗小,但是電流較大,難以達到精確控制;舵機接口簡單,功率中等,價格便宜,但是扭矩較小,速度調節范圍較小。
3舞蹈動作
3.1舞蹈動作的設計。在設計舞蹈動作時,我們采用截取動作的方法,即將選取好的舞蹈動作拆分成一個個單獨的狀態,然后剔除一些較為復雜的難以表現的動作,之后配合音樂重新組合形成一套全新的舞蹈動作。
3.2舞蹈動作的實現。在機器人實現設計好的舞蹈動作時,舞蹈動作的穩定和連貫、動作的美感和活力以及是否能跟上音樂節奏等問題都是我們必須考慮的,因此須得細細推敲并反復調試。
將設計好的動作按一幀一幀的順序播放(一幀一個狀態),依次在機器人上實現動作。舞蹈機器人在做動作時是按順序讀取預先設計好的動作程序,而這些動作程序是每個舵機轉動的角度數據。
具體步驟:①將選取的舞蹈視頻慢速播放,并截取成一幀一幀的圖像,將每一個動作分解成一個又一個的狀態(若前后兩個狀態變化幅度過大,則插入一個過渡狀態,實現緩沖和銜接的目的)。
②按照每一幀的圖像,對應確定每一個舵機的旋轉角度。
③配合音樂的節奏、速度以及形式并考慮機器人的實際現,不斷調整動作的時間間隔,使得舞蹈動作與音樂節奏相得益彰。
④反復的觀察和調試之后,確定最終舞蹈動作。
連接機器人→動作狀態→編輯調試機器人
4結語
人形機器人集機電、材料、傳感器、計算機控制技術等多門學科于一體,是一個國家高科技實力和發展水平的重要標志,因此,世界發達國家都不惜投入巨資進行開發研究。
人形舞蹈機器人研究在很多方面已經取得了突破,如機械單元、基本行走能力、整體運動、動態視覺等,但是離我們理想中的要求還相差甚遠,未來我們還需要在機器人的思維和學習能力、與環境的交互、軀體結構和四肢運動等方面進行更進一步的研究。
參考文獻:
[1]楊東輝,徐嘉隆,陳海東.高自由度舞蹈機器人的設計和實[D].西北工業大學,2008,5
[2]肖慧杰.舞蹈機器人控制系統研究與設計[D].東北大學,2006
[3]陳睿,羅文寬,王碩,顧孟琪等.仿人形舞蹈機器人的設計與實現[D].產業與科技論壇,2017
作者簡介:來盼盼(1999.05-),男,漢族,陜西省咸陽市人,西安市未央區長安大學,機械電子工程專業,本科生。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
建材發展導向(2022年6期)2022-04-18 08:17:26
建材發展導向(2021年11期)2021-07-28 06:57:42
建材發展導向(2021年7期)2021-07-16 07:07:28
防爆電機(2020年4期)2020-12-14 03:11:14
中國核電(2017年1期)2017-05-17 06:10:04
電子制作(2016年1期)2016-11-07 08:43:05
專用汽車(2016年5期)2016-03-01 04:14:49
專用汽車(2016年5期)2016-03-01 04:14:48
中國房地產業(2016年2期)2016-03-01 01:25:23
