農業機械自動導航技術研究進展
2020-10-17 01:01:48譚晨佼李軼林王東飛毛文菊楊福增
農機化研究 2020年5期
關鍵詞:模型
譚晨佼,李軼林,王東飛,毛文菊,楊福增
(1.西北農林科技大學 機械與電子工程學院,陜西 楊凌 712100;2.農業農村部北方農業裝備科學實驗觀測站,陜西 楊凌 712100;3.農業農村部蘋果全程機械化科研基地,陜西 楊凌 712100)
0 引言
隨著科學技術的不斷發展,我國農業正朝著以提高農業資源利用率、保護農業生態環境為核心的“精準農業”方向發展[1],而精準農業的發展也帶動著農業機械向著自動化、智能化的方向發展。與此同時,隨著我國人民生活水平的不斷提高,人們對農產品的需求也在成倍地增長,但由于工業對于勞動力的吸引及人口老齡化等原因,農村勞動力正不斷下降,不可避免地要求提高我國農業機械的智能化水平。智能化農業機械能夠降低勞動強度、解放勞動力、提高生產效率、降低生產成本及增強操作舒適性,而農業機械的自動導航技術作為農業機械智能化技術中的一項關鍵技術,廣泛應用于耕種[2-5]、除草[6-7]、施肥[8-9]、施藥[10-12]、收獲[13-14]等農業生產中。所謂自動導航,就是農業機械利用自身攜帶的傳感器感知周圍環境和車體的信息,通過對獲取信息處理并進行導航決策和控制,從而完成相應的農業生產任務。
本文介紹了現代農業機械自動導航系統的典型結構,針對環境感知技術和導航控制策略的國內外研究現狀進行了詳細綜述,分析了目前常用的環境感知技術的優缺點,并探討了農業機械自動導航技術的未來發展趨勢。
1 現代農業機械自動導航系統的典型結構
農業機械自動導航系統主要包括環境感知單元、控制單元和執行單元三部分,如圖1所示。環境感知單元是利用傳感器對農業機械進行實時定位及對周圍障礙物進行檢測;控制單元負責對導航路徑進行跟蹤,并輸出相應的控制信號;執行單元根據控制信號控制車輛的轉向,從而使車輛沿著導航路徑行走。
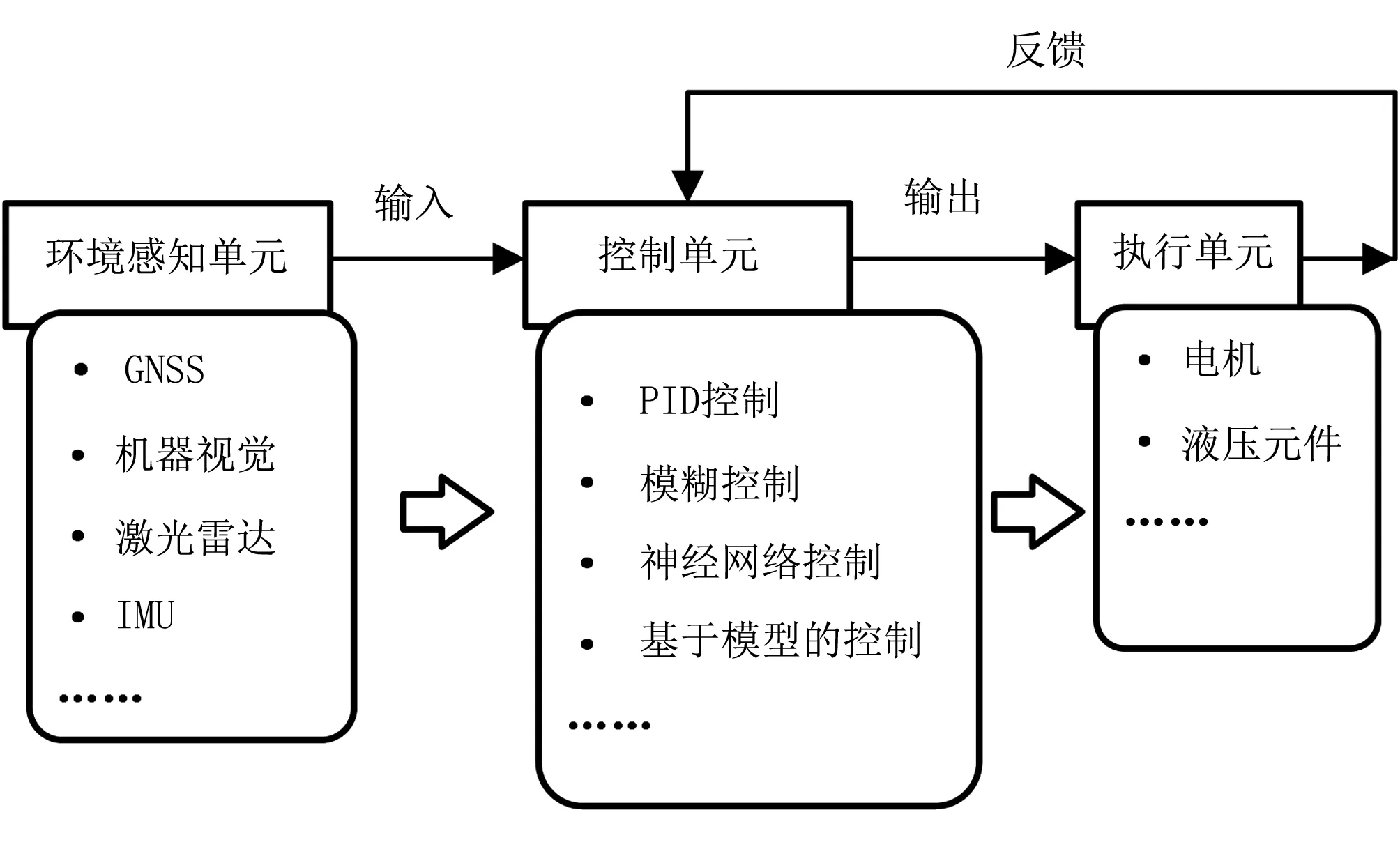
圖1 現代農業機械自動導航系統的典型結構
2 環境感知技術
環境感知技術主要兼用傳感器收集農業機械作業時周圍的環境物體信息和車體狀態信息,如位置、航向及速度等。
2.1 全球導航衛星系統
全球導航衛星系統簡稱GNSS(Global Navigation Satellite System),主要包括美國的GPS(Global Positioning System),俄羅斯的GLONASS,歐盟的GALILEO和中國的BDS(BeiDou Navigation Satellite System)。目前,農業機械導航系統中普遍使用具有厘米級定位精度的RTK-GPS(real-time kinematic GPS)[1]。O’Connor[15]最早將RTK-GPS運用到拖拉機自動導航上,其研發的導航系統直線跟蹤誤差小于2.5cm,航向精度小于1°。ünal等[16]利用RTK-GPS設計了具有自動導航功能的殘茬測量機器人,導航精度小于12cm。張智剛等[17]以久保田插秧機為研究平臺,利用Trimble4700 RTK-DGPS和HMR3000電子羅盤設計開發了自動導航控制系統,在行進速度0.75m/s時,直線跟蹤的平均跟蹤誤差為4cm,最大跟蹤誤差0.13m;在行進速度0.33m/s時,圓曲線跟蹤的平均跟蹤誤差為4cm,最大跟蹤誤差8.7cm。黎永鍵等[18]基于RTK-DGPS設計了東方紅X-804型拖拉機的自動導航系統,路徑跟蹤誤差平均值小于1.9cm,標準差不超過4.1cm,角度跟蹤誤差平均值為0.43°。劉明陽[19]基于RTK-GPS和IMU設計了郁閉果園機器人,該機器人能夠按照設定的目標路徑實現郁閉果園內的自主行走。劉兆朋等[20]基于RTK-GNSS設計了雷沃ZP9500 高地隙噴霧機的自動導航作業系統,分別在水泥路面、旱地和水田進行了測試,該系統的直線路徑跟蹤橫向位置偏差最大值分別為3.9、9.8、17.5cm,平均值分別為0.15、1.3、2.2cm,標準差分別為1.0、3.3、4.4cm。試驗結果表明:該系統具有較好的控制精度,如圖2所示。

圖2 雷沃ZP9500噴霧機自動導航作業系統
目前,GNSS導航應用廣泛且技術成熟,其中RTK-GPS的定位精度可達厘米級,在大田等開闊環境下具有廣闊應用前景;但在設施農業和枝葉茂密的郁閉果園內,GNSS信號容易被遮擋,易造成定位結果的不準確。
2.2 機器視覺
機器視覺由于其獲取的環境信息豐富、目標信息完整、經濟性好,近年來在農業機械導航中應用廣泛。Wang等[21]利用閾值分割和形態學算法提取作物行,從而生成導航線,實現了基于單目視覺的拖拉機自動導航。Hiremath等[22]提出了基于粒子濾波的視覺導航算法,并與現有的下采樣、超格林濾波和閾值分割等算法進行了對比,證明該算法的魯棒性較好,能夠準確地指導機器人在玉米地行走。English等[23]提出了一種基于視覺紋理跟蹤的方法,主要提取和跟蹤占主導地位的平行紋理的方向和橫向偏移量,從而抽象出特定作物的細節,如顏色、株距等,并在白天和夜晚進行了試驗,試驗結果表明:該方法能夠自動引導機器人沿著作物行行走。Radcliffe等[24]利用多光譜攝像機采集果園圖像,結合樹冠與天空背景信息,提取出樹行中心的路徑。在桃園的實地試驗結果表明:該導航系統的均方誤差為2.13cm,如圖3所示。

圖3 Radcliffe研制的視覺導航平臺
孟慶寬等[25]利用K-means聚類算法將綠色作物從土壤背景中分離出來,并通過形態學濾波去除雜草等干擾信息,最后利用粒子群算法快速準確地提取出導航路徑。其研發的導航系統最大橫向偏差小于15cm,能夠滿足農業機械自主導航作業的要求,算法抗干擾性強、復雜度低。翟志強等[26]提出一種基于Census變換的雙目視覺作物行識別算法,運用主成分分析法擬合作物行中心線。試驗表明:作物行中心線的正確識別率不小于92.58%,平均偏差角度不大于1.166°,圖像處理時間平均值不大于0.293s。馬志艷等[27]提出了一種基于視覺的茶作物行間行走路徑規劃方法,在壟間利用漫水填充法分離壟溝,然后利用最小二乘法提取導航線,對于壟頭,先分離出轉彎一側的作物,采用圓形模型擬合壟頭處輪廓,通過擬合的圓規劃出轉彎時路徑,壟間算法處理平均耗時172ms,壟頭算法處理平均耗時141ms,具有較好的實時性。
由于視覺傳感器價格便宜且獲取的環境信息豐富,基于機器視覺的自動導航方法目前研究較多。但是,在設施農業、果園等復雜的環境中,圖像處理算法易受光照、陰影的影響,還需要針對這類環境進行算法優化,增強魯棒性和實時性。
2.3 激光雷達
激光雷達利用光的反射對周圍環境進行掃描,測距精度高,能夠可靠地提供周圍物體的方位和深度信息[28]。Hiremath等[29]提出了一種激光雷達的概率傳感器模型,利用該傳感器模型開發了一種基于粒子濾波的導航算法。試驗結果表明:其航向均方誤差為2.4°,橫向偏差的均方誤差為4cm,能夠很好地適應玉米地的自動導航。Kurashiki等[30]利用激光測距儀和地圖匹配,實現了自動駕駛車輛在果園中的自我定位。果園實地試驗的結果表明:橫向方向上的平均誤差約為20cm,如圖4所示。戚樹騰等[31]利用激光雷達掃描果樹樹干得到果樹的位置信息,然后用霍夫變換實現果樹行直線的提取,并在模擬果園環境下進行了試驗,結果表明:機器人在0.14m/s行駛40m后,最大橫向偏差為26cm,能夠適用于果園作業。周俊等[32]利用激光雷達實時檢測果樹樹干中心點,并與先前記錄的中心點進行匹配,利用匹配的結果校正根據里程計數據計算出的機器人位置和航向,實現在密植果園內的準確定位。10次重復實驗表明:x和y方向上定位誤差的標準差都約為8cm,精度能夠滿足密植果園作業機器人的需求,如圖5所示。

圖4 Kurashiki研制的導航平臺
由于需要固定反射光線的目標,激光雷達在玉米地、果園這類容易反射激光的環境下應用廣泛。目前,常通過激光雷達掃描植株、樹干位置信息作為導航信息,實現農業機械的自動導航。不足之處:二維激光雷達視角小,對較小物體檢測效果不佳,且對作物行、樹行的對稱性也有較高要求;三維激光雷達成本較高,且數據量大,對處理算法提出了較高要求。

圖5 密植果園作業機器人
2.4 慣性測量單元
慣性測量單元是利用陀螺儀和加速度計檢測物體姿態角和加速度的裝置,能夠不依賴外界環境進行導航。由于低成本的慣性測量單元的誤差易隨時間的增加而累加,因此一般不單獨使用而是融合其他傳感器使用。Takai等[33]利用RTK-GPS和IMU(Inertial Measurement Unit)開發了自動導航履帶式機器人,并設計了地頭轉向的“鑰匙孔”算法,試驗表明:該機器人的橫向跟蹤誤差小于5cm。Yang等[34]利用RTK-GPS和IMU開發了能夠自動導航的輪式拖拉機以降低勞動成本,并在耕地、噴藥和除草等田間作業中試驗,結果表明:均方誤差均小于5cm,滿足勞動生產的需要,如圖6所示。張京等[35]提出了一種以GNSS信號品質和航向角變化幅度信息為指導的INS/GNSS航向信息融合策略,并通過仿真和實際應用測試了航向信息的融合效果。試驗結果表明:較單獨使用INS或GNSS,其融合后的航向明顯提升了精度。趙書尚等[36]選用RTK-GPS和IMU組合導航的方式,重點對GPS因地形傾斜和土質硬度不均勻引起的誤差進行校正,構建了卡爾曼濾波器,校正了因GPS傾斜帶來的定位誤差,減少了拖拉機運動軌跡的波動。
慣性測量單元不依賴外界環境工作,能夠在短時間內提供較為精確的位置信息和航向信息,但長時間的導航會產生位置誤差積累,在實際使用中,常與其他傳感器互相融合來修正慣性導航的誤差積累,從而實現在各種環境下的精確導航。
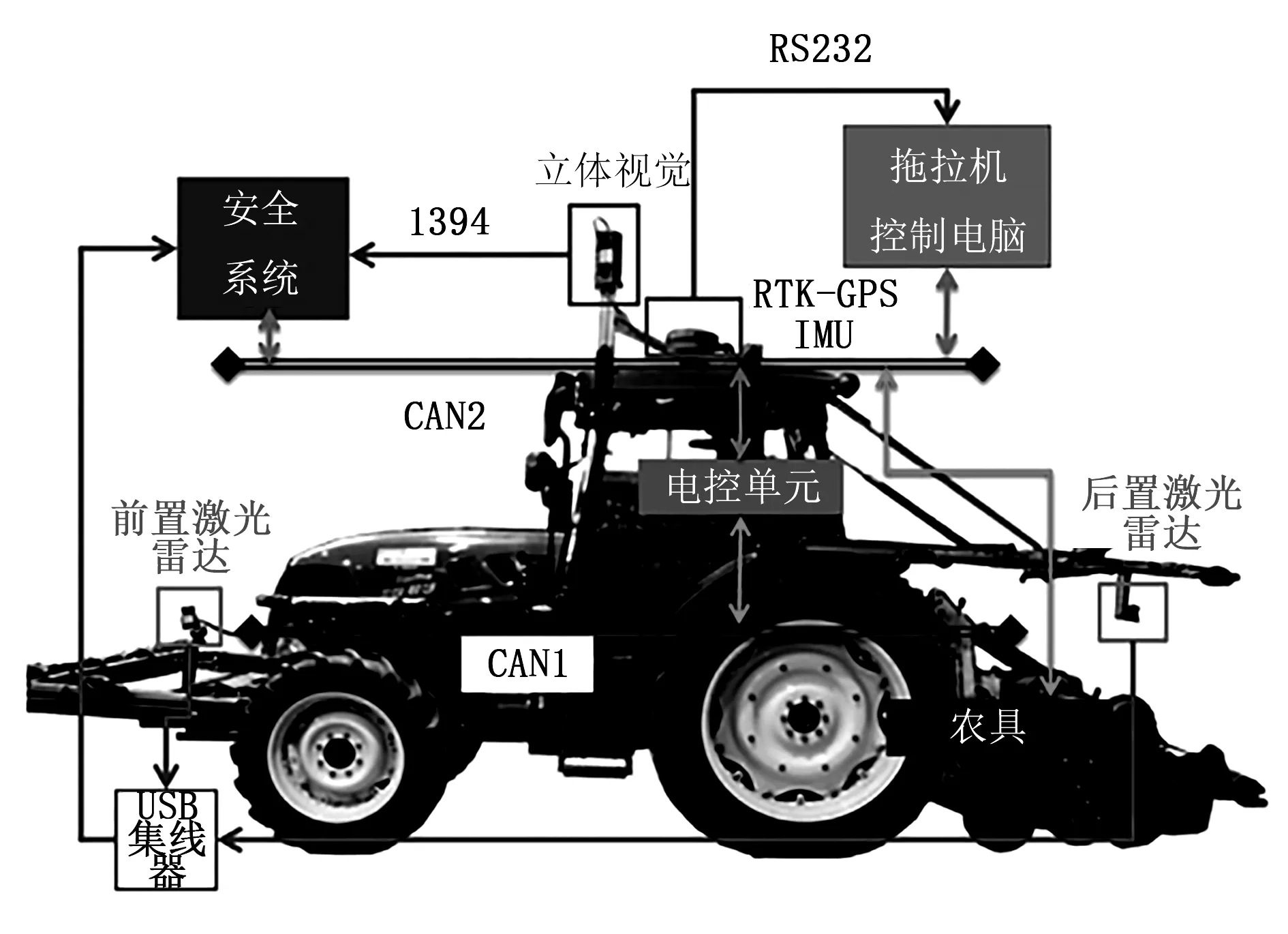
圖6 輪式拖拉機自動導航系統
2.5 其他傳感器
超聲波傳感器是利用超聲波回波測距原理對周圍環境進行感知,具有結構簡單、不受光線影響、成本低等特點,但其定位精度較低。王盟[37]利用三球定位技術,設計了基于DSP(Digital Signal Processing)和超聲波傳感器的全局定位系統,并利用模糊推理方法,實現了機器人的避障和路徑規劃功能。機械傳感器具有機構簡單、可靠性高和成本低的優點。陳剛等[38]研制了一種用于玉米自動對行作業的機械接觸式導航控制系統,試驗結果表明:在轉向輪偏轉角度為0.115rad、轉向輪轉動速度為0.357rad/s、作業速度為4km/h時,自動對行作業穩定性最好。
結合相關文獻[39-41],對比了4種常用農業機械環境感知傳感器的性能,如表1所示。
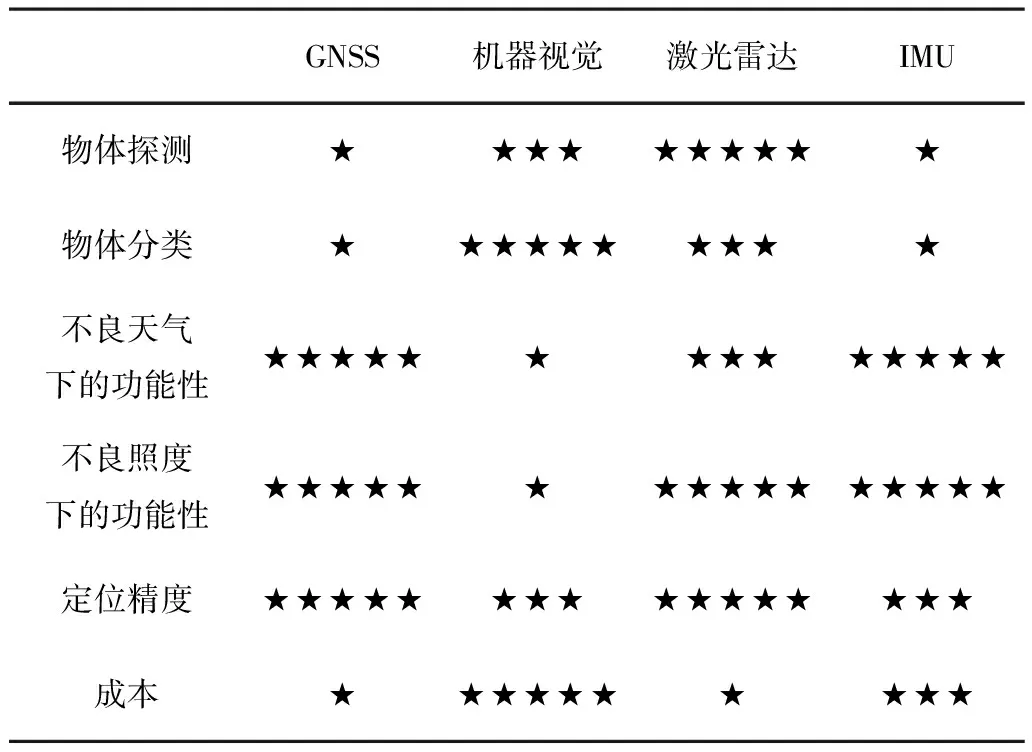
表1 4種常用農業機械環境感知傳感器性能對比
各個傳感器均有各自的優缺點,因此適用的場合也不同,GNSS、IMU在不良天氣和照度的環境下表現更加優秀,機器視覺和激光雷達獲取的環境信息更加豐富,GNSS和激光雷達的定位精度優秀,機器視覺和IMU則在成本方面更具優勢。
3 導航控制策略
3.1 PID控制
PID是比例、積分、微分的簡稱,適用于線性且動態特性不隨時間變化的系統[42]。典型的PID控制系統結構如圖7所示。
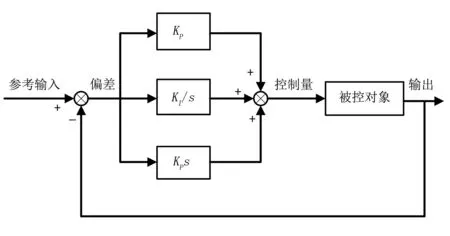
圖7 PID控制結構圖
PID控制算法不依賴數學模型,魯棒性較強,穩態誤差小,在農業機械導航控制方面應用廣泛。合適的比例系數、積分系數、微分系數決定著系統的精度,但這3個參數的調整常依賴工程經驗,因此優化PID控制有一定難度。
3.2 模糊控制
模糊控制是以模糊集合論、模糊語言變量和模糊邏輯推理為基礎的控制方式,不需要對被控對象建立完整的數學模型,特別適用于非線性、時變、模型不完全的系統[49]。典型的模糊控制結構如圖8所示。
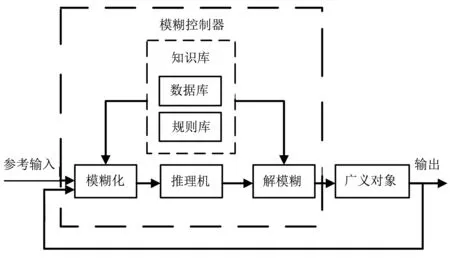
圖8 模糊控制結構圖
目前,采用模糊控制的農業機械導航中常以當前位置與目標路徑之間的橫向偏差、航向偏差作為模糊控制器的輸入,以輪速差或期望轉向角為輸出。模糊控制規則的設計一般依靠專家的經驗和知識,能快速調節系統誤差并保持較好的穩定性,但在零位附近跟蹤誤差一般較大,難以快速修正。
3.3 神經網絡控制
神經網絡控制是指在控制系統中利用神經網絡對非線性對象進行建模,克服受控對象的不確定性、遲滯等動態影響,從而實現精確控制[55]。Jodas等[56]開發了一種通過人工林特征來控制移動機器人的導航系統,比較了支持向量機和人工神經網絡,并找出最合適路線的效果。試驗結果表明:支持向量機和人工神經網絡的準確率分別為93%和90%。Eski等[57]采用PID控制器和基于模型的神經網絡PID控制系統分別對無人農用車輛進行了控制為了測試所開發的控制結構的性能,使用了3種不同的輸入信號,結果表明:當兩種控制結構的結果都以瞬態響應(如上升時間、沉降時間、峰值時間、峰值、沉降時間)和穩態響應的方式進行檢驗時,所設計的控制系統均取得了良好的效果。陳軍等[58]以當前車輛與目標路徑的距離、橫擺角、轉向角和轉向角變化量為輸入,下一個采樣點與目標路徑的距離、橫擺角和轉向角為輸出,構建了4-4-4-3的BP神經網絡算法。試驗結果表明:車輛沿直線路徑行駛時,95%的變差絕對值小于5cm。唐晶磊等[59]根據預視導航參數、當前導航參數和反饋導航參數,訓練了BP神經網絡。試驗結果表明:農業機器人實際行走路線與理想路線橫坐標的最大反饋位置偏差為-6.9cm,最大預視位置偏差為-4.3cm,最大反饋角度偏差為-3.5°,最大預視角度偏差為-2°,能夠獲取精度較高的導航參數。袁鑄等[60]為了優化農業機器人的軌跡精度,在控制算法中引入了BP神經網絡與計算力矩法結合的自動控制器,通過BP神經網絡對不確定動力學因素進行判斷,并提出解決該因素的自適應學習法。仿真結果表明:該優化算法能有效優化機器人運動路徑,提高了機器人整體作業效率。
神經網絡控制不需要精確的數學模型,有很強的非線性擬合能力,易于計算機實現。在農業機械導航控制中,常利用偏差作為輸入,期望轉向角作為輸出來訓練神經網絡,或利用神經網絡學習優化PID控制中的比例、積分、微分系數,來改善PID控制的精度。其缺點是訓練神經網絡需要大量的樣本,且神經網絡的輸出具有不確定性。
3.4 基于模型的控制
基于模型的控制主要是利用農機運動學和動力學模型,實現對農機的路徑跟蹤控制。Backman等[61]利用GPS、IMU和2D激光雷達設計了一種拖拉機-拖車導航系統,使用了非線性模型控制拖車的路徑跟蹤。試驗結果表明:橫向偏差小于10cm,且在彎曲路徑的行駛速度能達到12km/h。Bao等[62]建立了車輛的動力學模型,利用拓展卡爾曼濾波實現了對車輛的狀態估計。白曉平等[63]針對運動學模型中的近似條件對模型控制方法曲線路徑跟蹤精度的影響,提出了一種農機導航自校正模型控制方法,采用模型控制方法設計控制律,并采用模糊控制方法自適應地在線調節模型控制律的控制量。試驗結果表明:當速度為1.0m/s時,直線跟蹤最大橫向偏差小于6.49cm,曲線路徑跟蹤的最大橫向偏差小于18.57cm。張聞宇等[64]為了解決油菜直播機組導航作業中田頭換行、轉彎等直線跟蹤之間的銜接控制問題,提出了一種雙切圓尋線模型的控制方法,并對初始偏差較大時拖拉機的尋線路徑進行了定量分析,獲得最優尋線路徑的幾何關系,構建了控制決策方法,同時計算得到前輪轉角以實現導航控制。田間和路面的試驗結果表明:當行駛速度為0.7m/s、拖拉機與目標直線初始橫向偏差為7m、初始航向偏角為90°時,控制器橫向偏差響應的超調量不超過3%,上升時間小于14s,調節時間小于19s。
運動學模型的控制常將農業機械抽象成二輪車模型,根據位置、航向從而確定農業機械的轉向角度,實現軌跡的跟蹤控制。由于運動學模型魯棒性較差,控制精度難以取得較好的效果。動力學模型由于體現了農機內在力與運動之間的關系,因此基于動力學模型的控制精度更高,但動力學模型的精確構建較為復雜。
4 結論與展望
4.1 結論
農業機械自動導航系統主要包括環境感知、控制決策和轉向執行3部分:環境感知負責實時定位和對周圍障礙物的檢測,控制決策負責對導航路徑進行跟蹤,轉向執行負責執行控制決策單元的控制指令。
GNSS導航使用廣泛,精度高,能夠全天候工作;但其信號容易受到干擾。機器視覺采集的信息豐富;但其易受光照、陰影等自然環境的干擾。激光雷達測距精確,探測距離遠;但視角相對較小,且成本較高。慣性測量單元能夠不依賴外界環境,在短時間內提供較為精確的位置信息;但長時間的導航會產生誤差積累,位置精度大大降低。
PID控制算法不依賴數學模型,魯棒性較強,應用廣泛;但比例、積分、微分的系數常依賴工程經驗,優化PID控制算法具有一定難度。模糊控制能快速調節系統誤差并保持較好的穩定性;但在零位附近跟蹤誤差一般較大,難以快速修正。神經網絡控制不需要精確的數學模型,有很強的非線性擬合能力,易于計算機實現;缺點是訓練神經網絡需要大量的樣本,且神經網絡輸出具有不確定性。運動學模型的控制常將農業機械抽象成二輪車模型,由于運動學模型魯棒性較差,控制精度難以取得較好的效果;動力學模型由于體現了農機內在力與運動之間的關系,因此基于動力學模型的控制精度更高,但動力學模型的精確構建較為復雜。
4.2 展望
隨著自動導航技術的不斷發展,研究基于深度學習的障礙物檢測技術與智能避障策略,進一步提高農業機械的自動化水平,以實現農業機械的智能化。由于不同傳感器均存在各自的優缺點,農業環境也存在著時變性、多樣性和復雜性,因此針對不同的農業環境,研究不同傳感器融合的環境感知系統,從而提高系統的穩定性和可靠性。例如,在設施農業、郁閉果園這類衛星信號易受影響的環境中,可結合機器視覺、激光雷達等傳感器實現精確導航。研究基于農業物聯網技術的導航作業遠程監控平臺,實現農業機械作業的可視化、遠程管理和任務調度;此外,可研究同構或異構農機聯合導航作業及集群控制策略,從而提高農業機械的作業效率,實現農業機械的大規模應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
